掩模台水平向的二维衍射平面光栅测量模型验证
2019-05-29郝春晓张文涛王献英黄逊志
郝春晓,张文涛,王献英,黄逊志
(1.桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004 2.上海微电子装备(集团)股份有限公司,上海 201203)
0 引言
随着集成电路行业的崛起,光刻机也发挥着越来越重要的作用,尤其是运动台的位置测量系统。本文提出利用平面光栅尺为核心部件,建立位置测量模型,对掩模台的位置进行精确定位。

图1 二维衍射平面光栅尺的掩模台布局图Fig.1 Plane layouts of planar grating of reticle stage
一般运动台的位置测量系统是以双频激光干涉仪为核心部件,建立运动台的运动移动引起光程变化的关系模型,测量运动台的位置。文献[1]研究分析的激光干涉仪测量运动台的不确定度可达25nm,行程为120mm。文献[2]程吉水等建立运动台的位置测量模型,控制精度达到10nm。但是激光干涉仪[3]由于波长受到环境等影响较大,导致其在精密测量上受到限制,文献[4]中也涉及到激光干涉仪系统的环境补偿等研究。平面光栅尺很好地完善了此缺点,文献[5]中利用一维光栅干涉仪建立掩模台的位置测量模型,但是文献[6]中研究证明,所提出的测量方法不仅解决了使用3个一维线性光栅的安装不便,而且利用数学模型本身对装配误差进行了计算和补偿。与使用3个一维线性光栅的方法相比,该方法在x和y方向上的耦合误差分别减小了约3倍和15倍。二维平面光栅尺解决了非正交性,使其测量精度远高于一维光栅干涉仪测量系统。所以本文研究用二维衍射平面光栅尺建立位置测量系统,并与双频激光干涉仪测量系统进行对比,验证平面光栅尺测量系统具有较高地测量精度。
1 测量系统安装布局
如图1是用两个二维衍射平面光栅尺[7](Planar grating)作为核心部件,分别在等距离的X向在0.5*L且Y向在零点处,安装在掩模台主基板两侧。为了使测量的阿贝误差尽可能小,所以要求光栅尺的工作面与掩模台平面为同一高度。读头1[8](Read Head 1)和读头2(Read Head 2)分别同轴安装在X向和Y向等距离且对称的位置上。为了使测量余弦误差减小,所以要求读头光束要垂直照射到平面光栅尺的平面上。左侧是掩模台的平面光栅尺和读头的安装俯视图,右侧是其左视图。
如图2是用激光干涉仪(Laser interferometer)作为核心部件,分别在X和Y向采用3个轴建立光程与掩模台的位置模型。左侧是掩模台的激光干涉仪的测量轴的安装俯视图,右侧是X向的反射镜(Reflector Mirror)。
2 测量系统
双频激光器(He-Ne dual-frequency laser)发出双频的光信号,经过分光镜(Beam splitter)分成两束光,一束作为参考信号连接到测量系统的控制机箱(Measuring system control cabinet)光电接收处理板卡(Optical signal Processing board)上;另一束入射到读头(Read head)作为测量信号,经过读头内部光路,照射到二维衍射平面光栅(Twodimensional diffraction plane grating)的表面,然后利用多普勒效应和干涉原理,得到不同位置的光信号,再由光电接收处理板卡处理成莫尔条纹数;最后模型计算板卡(Model calculation board)利用产生的莫尔条纹数计算掩模台运动的位置,输出掩模台的X、Y和Rz自由度。
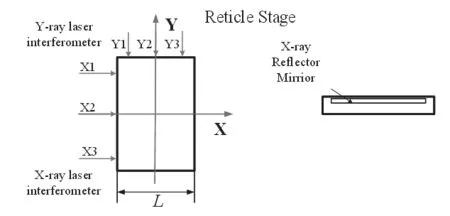
图2 激光干涉仪的掩模台布局图Fig.2 Plane layouts of laser interferometer of reticle stage
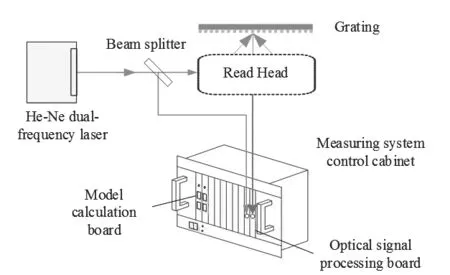
图3 二维衍射平面光栅尺测量系统Fig.3 Two-dimensional diffraction plane grating measuring system
3 测量模型
掩模台平面光栅尺主要是对掩模台水平方向自由度的测量,以二维衍射平面光栅尺为掩模台测量系统的核心测量部件,且每个平面光栅可以同时进行二维位移测量,再通过掩模位置与读头照射到光栅尺上移动的位移之间的关系。最后建立了根据两个平面光栅的4个输出量计算平面移动台三自由度位移的数学模型。


图4 掩模台的实物装置图Fig. 4 Physical layout of reticle stage
其中,X、Y、Z、Rx、Ry和Rz均指掩模台的6个自由度。
φ1:光斑在平面光栅尺X向上移动的位移;φ2:光斑在平面光栅尺Y向上移动的位移;φ3:光斑在平面光栅尺Rz向上移动的位移。
4 实验验证
本次实验根据图1搭建实验环境。两个二维衍射平面光栅尺和激光干涉仪分别安装在掩模台主基板上,使其伺服控制误差与环境干扰等误差尽可能相同,更好地进行测量位置误差对比。由于掩模台的主要行程是Y向,所以下列分析主要是以Y向进行分析。
首先,分别利用掩模台测量系统的PID闭环反馈[10]与加速度前馈控制策略,两个测量系统分别测量出水平向自由度;然后,把激光干涉仪测量系统和平面光栅尺测量系统的测量值与Y向自由度的名义值进行对比。其中,激光干涉仪测量系统的3sigma值为181nm,在其同个位置上采集405次取其平均后的值,目的是去掉部分重复性的干扰。
图5中,在匀速运动阶段,激光干涉仪和平面光栅尺测量值的误差都较小,而且平面光栅尺要小于激光干涉仪的误差值。激光干涉仪和平面光栅尺的测量误差主要是由伺服控制和环境等引起的系统误差,这间接可以说明,在相同的实验环境下,平面光栅尺测量系统受环境影响要比激光干涉仪测量系统小很多,所以误差更小,稳定性更强。
5 总结
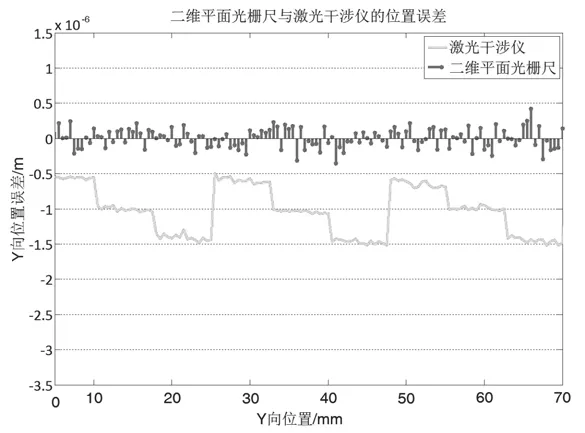
图5 测量系统的位置误差分布图Fig.5 Position error distribution diagram of measurement system
综上所述,本文提出了一种由两个二维衍射平面光栅组成的平面运动阶段三自由度位移测量方法,并建立了计算和补偿耦合误差、提高定位精度的数学模型。实验证明,与激光干涉仪测量方法相比,采用两种平面光栅测量方法可以提高X、Y和Rz方向的测量精度。结果表明,所提出的测量模型更适用于测量平面移动台的三自由度位移。
