玉米秸秆聚拢排菌覆土还田机的设计与结构分析
2019-05-27牛文学高聚林赵永来崔红梅杨雪頔
牛文学,高聚林,赵永来,崔红梅,杨雪頔
(1.内蒙古农业大学 职业技术学院,内蒙古 包头 014100;2.内蒙古农业大学 机电工程学院,呼和浩特 010018)
0 引言
玉米中含有大量的蛋白质、脂肪、纤维素及微量元素等,营养价值极高,是我国重要的粮食与饲料作物,其播种面积占农作物总播种面积的22.08 %。2016年玉米种植面积达到3 676.8万hm2,产量达到21 955.2万t。其中,内蒙古的种植面积为320.8万hm2,产量达到2 139.8万t[1]。我国玉米秸秆年产量达到2亿t以上,但玉米的秸秆处理一直是世界性难题[2]。根据国务院办公厅下发的《关于加快推进农作物秸秆综合利用的意见》,国家发改委、农业部联合下发了《关于印发编制秸秆综合利用规划的指导意见的通知》文件,要求省、市、县三级政府完成秸秆综合利用规划的编制工作,规划中要明确鼓励农作物秸秆综合利用的政策保障体系、秸秆利用的产业布局和重点项目。经过科研工作者对玉米种植区内土壤有机质平衡的研究表明:每年补充810~1 425kg/hm2的有机碳,可以长期保持耕作土壤的肥力[3]。
玉米秸秆中含有大量有机质,其还田腐蚀后会可分解转换为多种营养元素,能够促进土壤中微生物繁殖,加快土壤团粒结构的形成,提高土壤蓄水保墒能力,改善土壤理化性状,从而提高作物产量。
从还田方式上来看, 主要包括直接还田、间接还田及综合还田3种方式。直接还田方式中的翻压还田是我国主要的秸秆还田方式[4];但秸秆还田以后降解速度过慢,不能及时降解,耕作层存在大量未经腐烂的秸秆,会影响下茬作物的播种和灌溉,甚至会吸收部分氮肥,不利于下茬作物的生长,因此需要额外添加一些降解菌,从而加快降解速度。
农牧交错带冬季温度较低,直接还田后玉米秸秆腐蚀较慢,且影响春季的播种。试验表明:玉米秸秆直接粉碎并抛撒于地表后投放降解菌,能够加快秸秆降解,但来年播种时有未腐蚀的秸秆;而将粉碎后的玉米秸秆先进行聚拢,之后集中投放降解菌,秸秆降解的速率会得到明显的改善。国内外学者主要针对改进秸秆单独还田作业或改进秸秆还田机进行了研究[5-8],对秸秆小间距聚拢的作业机具研究较少。
针对内蒙古地区农牧交错带的气候条件,为加快玉米秸秆还田后腐熟进程,结合本课题组研制的可以大量生产的秸秆降解菌,设计了玉米秸秆聚拢排菌覆土还田机。该机具能够一次完成还田后玉米秸秆的聚拢、排菌、镇压及覆土组合作业。
1 整机结构设计
1.1 设计要求
根据农艺要求和工作条件提出以下要求:①在不停车的情况下完成聚拢、排菌、镇压及覆土作业。②整机的工作幅宽为4倍行距(4垄)。③每垄宽度小于300 mm。④降解菌为好氧菌,与氮肥、粘结剂混合,形状为圆形颗粒状。菌剂需投放在秸秆堆正上方,且必须与空气充分接触。⑤聚拢起来的秸秆堆要有一定的密度,保证秸秆不会有任何方向上的大幅度位移。⑥机具与拖拉机后部的牵引装置连接,由拖拉机牵引其作业。
1.2 整机结构设计
根据设计要求,所设计的机具工艺工序为:秸秆聚拢→投放降解菌→覆土。整机主要包括秸秆聚拢指盘、镇压机构、覆土装置、排菌装置、机架及限深轮,如图1所示。

1.聚拢指盘 2.镇压装置 3.覆土装置 4.排菌装置5.机架 6.限深轮
1.3 工作原理
工作时,玉米秸秆聚拢排菌覆土还田机悬挂于拖拉机后方;随着拖拉机的前进,秸秆聚拢指盘先进行聚拢作业,将秸秆分别从玉米播种行间聚拢到行上,并安装限深轮,以防止拨草齿过深的扎入土中;然后,对聚拢的秸秆进行排放菌剂;最后,将秸秆压实,并在周围覆盖一些土壤,防止秸秆吹散,以便于菌剂发挥作用。
1.4 整机性能和结构参数设计
整机作业地为旱地,土壤坚实度较高,由拖拉机牵引作业,覆土作业的牵引阻力较大。由于前面的聚拢装置驱动力为工作阻力,所以该机具不需要从拖拉机额外的输出驱动力,从而使机器结构紧凑,减轻整机质量,操纵稳定性好。
由于玉米的垄作间距为600mm,设计要求玉米秸秆聚拢排菌覆土还田机设置为一次性可起4垄耕地,所以有效工作幅宽为2 400mm。机架宽度为2 500mm,长度为2 000mm,长度方向上放置有2根梁,梁对称布置,相距1 200mm。第1根横梁下方的交错放置4对指盘,每对指盘相距500~600mm,由U型螺栓连接在机架前端;每个指盘的工作幅宽为200 mm。机架后上方放置排菌装置,在第2根横梁下方连接镇压装置,用于镇压秸秆堆,在机架后端放置覆土装置,并将秸秆堆两侧覆土。镇压装置运用凹面轮,覆土装置配置3个双翼式曲面型培土器和两个单翼式曲面型培土器,双翼式曲面型培土器放置在每对指盘的中心位置上。单翼式培土器对称布置在机架后侧两端,相距2 400mm,利用翼部将沿曲面升起的土壤向侧面翻转并堆置在秸秆堆处,实现覆盖秸秆的作用。玉米秸秆聚拢排菌覆土还田机的主要结构参数如表1所示。
表1 玉米秸秆聚拢排菌覆土还田机的主要结构参数
Table 1 Main structural parameters of corn straw gather and drain bacteria and cover soil machine

参数单位数值外形尺寸mm2000×2500×1200工作幅宽mm2400行距mm500~600作业行数4配套动力kW≥50作业速度km/h8~10菌箱容积L270
2 关键部件设计
2.1 聚拢装置的设计
玉米秸秆聚拢排菌覆土还田机的作业对象为秸秆残茬覆盖地,为提高秸秆降解菌的降解效率,需要先将秸秆聚成相距600mm的草垄。此过程劳动强度较大,人工收获效率低,所以需要实现机械化作业。国内目前尚未有成型的小行距聚拢机械,所以需要设计合理的小行距聚拢装置。秸秆残茬覆盖地的地面情况与牧草割倒后的地面情况类似,可以根据搂草机为原型进行改进。对横向搂草机、侧向滚筒式搂草机、水平旋转式搂草机、指盘式侧向搂草机进行比较表明,指盘式搂草机具有适应地形性能好、结构简单、牧草的移动距离短、损失较低、工作时不依靠拖拉机动力装置、由工作阻力驱动指盘旋转等优点[9],所以选择以指盘为原型进行改进。
2.1.1 总体设计
聚拢装置主要由指盘、指盘支架及仿型机构等组成,可以实现不同区域的连续运作,如图2所示。仿型机构采用平行四杆仿形机构,可以在地表起伏不大的田地上工作能得到单体仿形性能。指盘支架由60Si2Mn弹簧钢制成,以保证在规定范围内其弹性变形可以承受一定的载荷,并不会发生永久变形,保证指盘的工作角度不会发生变化。
2.1.2 指盘外形设计
作业的工作宽幅为200mm,每垄相距600 mm,结合秸秆收集前后的高度,选定指盘的直径为560 mm。指盘由弹齿、压盘、法兰、轴承、螺母和螺栓构成,如图3所示。法兰放置在压盘中心,由螺栓螺母将弹齿等间距的固定在两个压盘中间。压盘外圈的孔可以继续用螺栓螺母,将弹齿进行双重限位。法兰的内测放置轴承,便于安装支架。
指盘作业的地形较为复杂,要求指盘的弹齿具备一定的刚度和强度,同时在弹齿遇到障碍或者撞击时弹齿能够具有一定的弹性和韧性。根据机具的工作性质要求,弹齿的材料选择60Si2Mn弹簧钢。弹齿与支架的弹性变形能力使整个机构有着较好的抗拉强度、弹性极限和疲劳强度,从而使得机构可以在冲击、振动和长期交变应力下使用。

1.指盘 2.指盘支架 3.仿型机构

1.弹齿 2.压盘 3.法兰 4.轴承 5.螺母 6.螺栓
2.1.3 指盘的夹角设计
聚拢装置的主要工作部件是指盘,但指盘的半径较小,按照搂草机的排布方式放置指盘时工作效率不高。为了高效完成作业任务,指盘平面的水平直径与机器的前进方向成一定角度(指盘的偏角α)的同时,指盘平面与平行于该水平直径的铅垂面之间也存在一个夹角,为指盘的倾角β。放置位置如图4所示。

图4 指盘位置示意图
2.2 单圆盘开沟器
将降解菌按要求剂量投放到秸秆堆中,主要由排菌装置完成。为了提高菌种的利用率,排菌量需要根据机具前进速度来调整排菌器的转速,故排菌结构使用外槽轮式变量排菌器,并由直流电机带动,直流电机由单片机控制。单片机以机具前进速度为参数,对直流电机的转速进行控制,从而达到精准排菌的目的。
2.2.1 外槽轮排菌器设计
外槽轮式排菌器由排菌盒、外槽轮及轴组成,如图5所示。排菌盒上方与菌箱相连,菌料从下部出口排出。外槽轮将排菌盒分为完全分离的上下两部分,轴的一端连接外槽轮的内壁,另一端与链轮相连,直流电机通过链轮带动轴旋转。工作时,菌料靠自身重力充满排菌盒上部及外槽轮凹槽内,随着外槽轮的旋转,凹槽中的菌料由上部带到下部,菌料因为重力从出口排出,从而实现排菌。该排种器结构简单,流动性较好,便于控制,整体以塑料为主,减少了菌料对机构的腐蚀[10]。
2.2.2 排菌装置的排量控制
该控制系统由磁感应式速度传感器、单片机、直流电机等组成,与拖拉机配合使用。采用拖拉机蓄电池供电,具有广泛的通用性。全电动的排菌过程简化了复杂的机械传动机构,降低设计成本和操作、维修难度。工作时,磁感应式速度传感器采集机具运动速度,将信号输入单片机内,单片机通过机具的运动速度及预先设定的单位面积排菌量,通过算法计算出该时刻的实际排菌量,并实时调节电机转速,使实际排菌量与定值相一致,从而实现变量排菌。其原理如图6所示[11]。
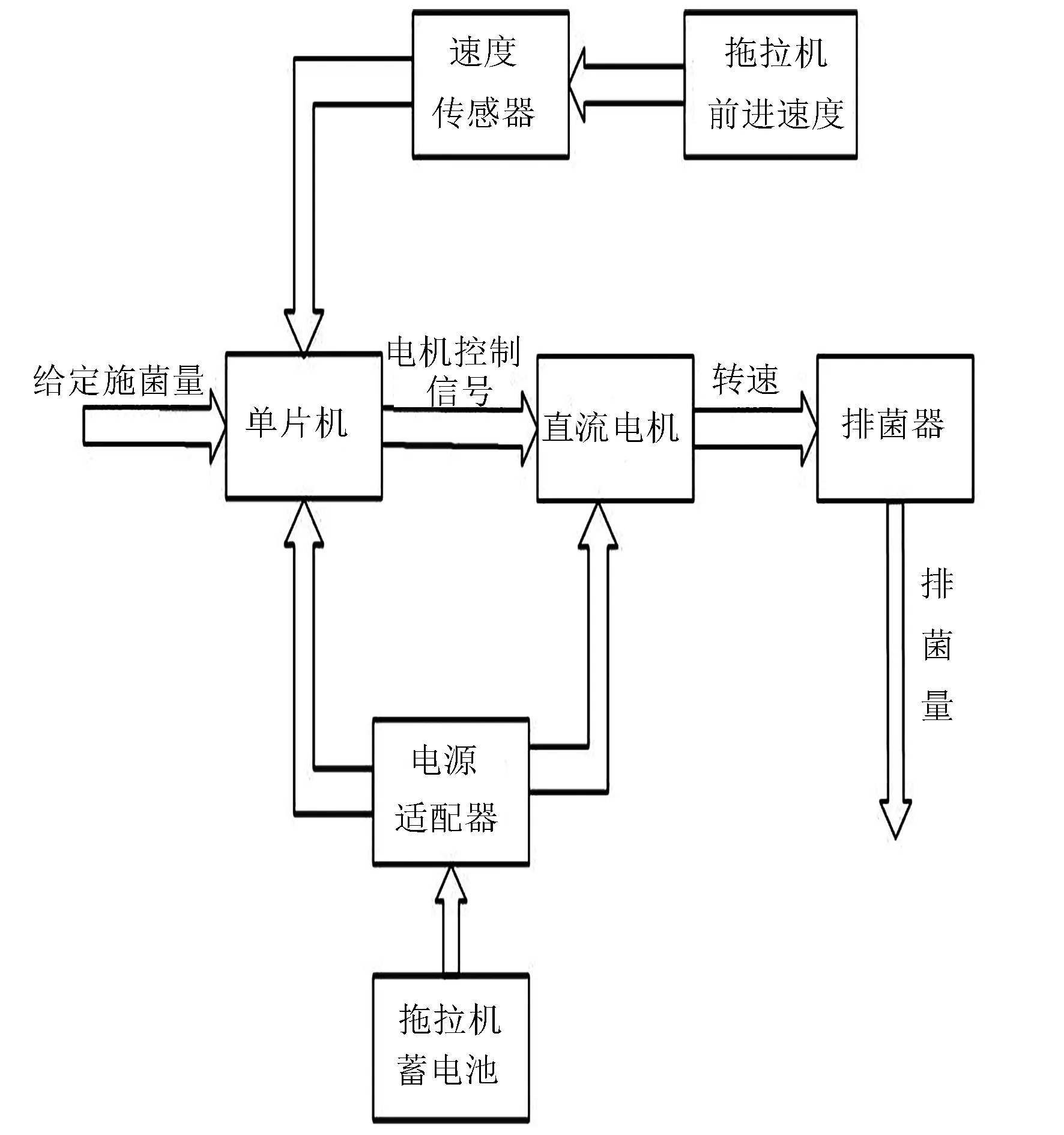
图6 排菌装置排量控制原理图
2.3 镇压装置的设计
秸秆聚拢以后,处于松散的状态,为了长时间让秸秆处于堆积的状态,在聚拢结束后需要对秸秆进行镇压,以便增大密度、缩小体积、增强聚拢效果。同时,根据农艺要求,两侧秸秆密度相对于投放菌种中间处的密度需要更大一些。设计镇压器时,其直径直接影响镇压效果及滑移率:直径越小,作业中的镇压轮滑移率越大,同时出现拖、壅物料现象的几率也随之增大;直径越大,越易传动,可减小作业中的滑移率,但过大的直径会增大作业过程中的滚动阻力;直径不同,对物料的镇压程度也不同[12]。
镇压装置由镇压轮、轮辋支撑架、压力调节机构及联接机构组成,如图7所示。镇压装置依靠U型螺栓与机架固定。镇压轮宽度是由秸秆聚拢后的集聚情况决定的,一般对于镇压器宽度而言,宽度过小易造成秸秆堆周围土壤下沉,在地表形成沟状;宽度过大,相同作业载荷下,会因镇压器与土壤接触面积增大而使其对土壤产生的压强减小,从而不能达到预定的镇压效果。根据农艺的需求设计镇压轮为工作幅宽300mm的凹面轮,凹面轮两边直径200mm,中间100mm。凹面轮对菌种附近的中间秸秆压实程度较弱,以满足菌种对氧气的需要。压力调节机构由调节拉杆、弹簧及轮辋支撑架上的凹槽构成,弹簧一端和调节拉杆相连,另一端固定在轮辋支撑架上。将调节拉杆拉到不同的凹槽内,弹簧的弹力会发生变化,弹簧对轮辋支撑架的拉力也就随之改变,从而迫使镇压轮会对物料施加不同的压力,从而使调节拉杆可以调节镇压后的秸秆堆的高度。压力调节装置一共分为Ⅰ~Ⅴ挡,挡位越高,对物料施加的压力越大。将高度为200mm的秸秆堆进行镇压实验,结果表明:调节拉杆位于Ⅰ挡时,滚压1次,高度方向可挤压为150mm;Ⅴ挡时,滚压1次,高度方向可挤压为120mm。

1.镇压轮 2.轮辋支撑架 3.压力调节装置
2.4 覆土装置的设计
镇压装置对秸秆堆进行碾压后,秸秆堆的宽度会有小幅度的增加,导致机具作业效果不能符合农艺要求,需要添加机构对秸秆堆的宽度进行约束。经过挤压的秸秆堆难以一直保持挤压后的状态,所以在镇压秸秆后需要再添加覆土装置,将部分土壤覆盖秸秆。降解菌为好氧菌,需要与空气充分接触,降解菌周围的秸秆需暴露在空气中。综上所述,覆土装置要做到秸秆堆两侧覆土,而中间部分保持原有状态,结合土壤实际情况,选用曲面型培土器作为覆土装置的工作部件。曲面型培土器主要由铲柱、右培土壁、右调节壁、左调节壁、 左培土壁、铲尖和铲胸等组成,如图8所示。

1.铲柱 2.右培土壁 3.右调节壁 4.左调节壁 5左培土壁 6.铲尖 7.铲胸
铲胸和培土壁一起构成铲体曲面,铲尖主要实现破土的作用,铲体曲面实现破碎、翻转土壤,并将土壤推向两侧的作用。铲尖使用螺栓固定,磨损后可及时更换,其工作幅宽可由调节杆调节,调节范围为250~350 mm,工作深度30~50 mm。铲尖呈三角形,工作面近似为凸曲面。铲刃应进行淬火处理,使其具有较好的入土性能和良好的耐磨性。翼板曲面参数在设计时根据土壤性质确定[13],加工时尽量保证工作面各处光滑过渡,减小工作阻力,最大限度减少粘土现象,且可以使土壤沿光滑曲面稳定移动。
3 聚拢装置的参数确定
聚拢装置中弹齿的运动轨迹直接影响着秸秆的聚拢状态。在指盘平面的中心,建立右手直角坐标系:x轴的正向与机器前进方向一致,z轴指向远离地面的方向。将指盘简化成圆,在投影面上的投影如图9所示。

图9 指盘投影简图
3.1 指盘的运动学分析
简图中指盘上某点的绝对运动是由机组的前进运动和指盘的回转运动合成,轨迹在XOZ平面内为摆线,在直径为560mm的指盘边缘上表现为短摆线。指盘圆上的任意一点的空间运动轨迹为

式中R—分析点距离坐标原点的距离;
ω—指盘角速度;
t—时间;
α—指盘偏角;
β—指盘倾角;
v—指盘前进速度。

图10 指盘边缘某一点的运动轨迹
由公式(2)得到:在指盘的结构尺寸特定时,指盘的工作参数主要有偏角α、倾角β及前进速度v;而影响弹齿运动轨迹的主要有偏角α与倾角β,从计算机绘图中表明前进速度不会影响其运动轨迹。
3.2 指盘偏角α的分析
为了研究偏角α对指盘运动的影响,设定指盘半径R=280mm,机器前进速度v=10km/h,倾角β=30°,绘制出偏角α分别为45°、42°、39°、36°、33°、30°的运动轨迹,如图11所示。

1.α=30° 2.α=33° 3.α=36° 4.α=39° 5.α=42° 6.α=45°图11 偏角α与运动轨迹的关系
由图11可知:偏角α越大,指盘投影在YOZ平面内的椭圆短径越大,工作幅宽越大。由YOX平面的投影视图可知:当y方向上移动量一定时,偏角α越大,x方向的移动量增大,秸秆的位移增大,秸秆损失量也随之增大;当偏角α过大时,指盘会出现滑移现象,工作效率下降,牵引阻力增大。当前进速度一定时,偏角α越大,秸秆运动时垂直于机具前进方向的速度分量越大,导致秸秆的横向位移增大,聚拢起来的垄宽随之增加。
3.3 指盘倾角β的分析
为了研究倾角β对指盘运动的影响,设定指盘半径R=280mm,机器前进速度v=10km/h,偏角α=45°,绘制出β分别为42°、36°、30°、24°、18°的运动轨迹,如图12所示。

1.β=18° 2.β=24° 3.β=30° 4.β=36° 5.β=42°
由图12可知:倾角β越大,指盘投影在YOZ平面内的椭圆长轴越偏于水平方向,工作幅宽越大,同时秸秆在竖直方向的移动越小;当倾角β过大时,指盘在竖直方向上的高度太小,会出现聚草的现象,同时出现滑移现象,工作效率下降,牵引阻力增大。
综上分析表明:在不出现滑移的现象时,指盘的偏角α越大越好,倾角β越小越好。在调整工作幅宽时,优先考虑增大倾角β。
3.4 弹齿数的确定
为了保证指盘能连续转动和搂集秸秆,指盘上要设有一定数量弹齿。由于指盘的直径较小,弹齿数量过多会造成缠草的情况,根据中国农业科学院草原研究所对搂草机的研究:弹齿数m可用通过角Φ等于弹齿间夹角θ偶数倍关系确定,即Φ=Kθ(K=4、6、8、…)[14-15]。结合指盘自身的运动特征,得

式中R—指盘半径;
β—指盘倾角;
h—物料厚度;
m—弹齿数目。
假设秸秆厚度为60mm,取K=6,则m=24。
在内蒙古包头市土默特右旗的10月田间进行试验,直径为560mm的指盘在聚拢碎秸秆(秸秆长度≤100mm)的作业中,指盘倾角为0~40°时指盘不会出现滑移现象;再根据指盘的工作幅宽,确定指盘偏角30°~60°,弹齿数目为24时整机工作性能较好。
4 田间试验与结果
4.1 试验基本条件
田间性能试验在内蒙古包头市土默特右旗的内蒙古农业大学职业技术学院玉米试验田进行,试验地属于一年一熟的平原区,土壤为壤土,年降水量400mm左右。试验日期为2017年11月1日,气温-10°,土壤含水率为13.9%。试验区域为玉米收货后,秸秆粉碎还田,秸秆覆盖量4.5kg/m2。
玉米秸秆聚拢排菌覆土还田机的优点为:能够将秋收后粉碎的玉米秸秆集条,且覆盖适量土壤,加入玉米秸秆降解菌后加快秸秆腐蚀,使还田后的秸秆变为第2年播种时的有机肥料。其解决了农牧交错地带保护性耕作中玉米秸秆腐蚀不完全的问题,有利于推广农牧交错地带的保护性耕作。玉米秸秆聚拢排菌覆土还田机照片如图13(a)所示,田间试验如图13(b)所示。


图13 玉米秸秆聚拢排菌覆土还田机及田间试验
4.2 试验结果
4.2.1 漏搂率
漏搂率参考国家标准GB/T14247-2015《搂草机试验方法》[16]。试验时,漏搂率行程为5 m,捡拾机具通过后未能搂到且长度大于70mm的玉米秸秆,定义为漏搂秸秆。称量5m内平均漏搂秸秆质量为m1,称量行程5m内搂集秸秆质量为m2,m1与m2的比值为漏搂率。通过试验测得该机漏搂率为2%,满足设计要求。
4.2.2 秸秆集条宽度
秸秆集条宽度在每个行程选5m,每隔0.5m测量一次秸秆集条宽度。试验测得该机秸秆集条宽度为0.28~0.35 m,满足设计要求。
4.2.3 排菌量
由于田间试验过程中外槽轮排菌装置将玉米秸秆降解菌与尿素排入集条的秸秆上,因此较难测试排量。试验用腐熟剂为内蒙古农业大学职业技术学院自主提取的玉米秸秆降解菌与尿素混合而成。排菌器的排菌性能在室内的播种器性能实验台中进行,外槽轮转速与整机前进速度与试验相同,测得外槽轮排菌器的降解菌与尿素混合物最大排出质量流率为0.152 kg/s,满足设计要求。
4.2.4 破土深度
覆土装置破土深度直接影响着机具覆土量及覆土作业的效果。试验后,每隔0.5m测量培土器工作前后高度差,测试100m试验区共200个测量点取平均值,测得平均破土深度为4.57mm,满足设计要求。
5 结论
1)设计了该机具的指盘式聚拢装置,外槽轮式排菌装置,镇压轮式镇压装置,培土式覆土装置。
2)通过分析聚拢装置中弹齿的运动轨迹得到:指盘倾角为0°~40°。指盘偏角30°~60°、弹齿个数为24时,聚拢装置工作性能较好。
3)进行了玉米秸秆聚拢排菌覆土还田机的试验,结果表明:该机漏搂率为2%,秸秆集条宽度为0.28~0.35m,外槽轮排菌器的降解菌与尿素混合物最大排出质量流率为0.152kg/s,平均破土深度为4.57mm,满足设计要求。
