基于分数阶自抗扰的直线电机点位控制研究*
2019-05-24施昕昕黄家才
施昕昕,黄家才,林 健
(南京工程学院 自动化学院,南京 211167)
0 引言
在现代工业中,精密点位运动控制的要求越来越广泛,例如芯片封装设备、点位运动工业机器人、高档数控机床等[1-2]。直线电机与传统旋转电机相比,不需要中间转换环节,直接输出直线运动,在精密点位运动控制应用场合是较好的选择[3-4]。
点位控制是直线电机运动控制的一大重要任务,需要在目标位置实现快速、精确的定位。由于直线电机不存在中间转换环节,因此系统中的干扰、负载扰动等因素无缓冲地直接作用在直线电机上,这就对直线电机运动控制器的抗干扰性提出了要求。
时间最优控制通常用于点位运动控制,可以确保运动时间最短,快速实现目标位置的定位,但这种方法通常存在振颤现象[5-6]。文献[7]提出了一种基于粒子群优化算法的时间最优控制切换时间计算方法,可有效减轻振颤现象并保证很好的直线电机点位控制稳定性和控制精度,同时这种算法对控制器的硬件要求较高。自适应鲁棒控制是实现点位控制的另一种常用方法,可以对参数摄动进行自适应调整,达到鲁棒控制性能[8-9]。文献[10]提出了一种基于模型参考自适应控制的直线电机位置控制方法,实现直线电机对点到点信号的快速响应和跟踪,但尚未进行实验验证。
自抗扰控制由中科院的韩京清研究员提出,到现在已有二十多年的历史,由于其简单实用,控制效果好,目前在多个领域得到广泛的应用[11-12]。自抗扰控制器对扰动的抑制能力非常好,但在运动控制精度方面有待提高。近年来,分数阶控制引起了越来越多学者的关注,分数阶控制与传统整数阶控制相比,增加了可调的阶次参数,可在一定程度上改善控制性能[13]。
采用分数阶自抗扰控制器,对直线电机点位控制技术进行研究。仿真和实验结果表明,分数阶自抗扰控制器可有效实现直线电机点到点定位控制,具有定位精度高、抗干扰能力强、易于实现等特点。
1 直线电机结构特点及数学模型
采用的直线电机为自行研制,结构示意图如图1所示。直线电机为圆筒型轴对称结构,图1显示的是其四分之一截面图。直线电机的具体结构参数值如表1所示。

图1 直线电机结构图
该直线电机具有如下特点:
(1)直线电机的气隙磁场分布均匀,近似为梯形,如图2所示。均匀分布的磁场可以使得电磁力的大小与相电流成比例,而与动子的位置无关,从而便于实现精密的运动控制。
(2)线圈骨架采用环氧树酯材料,可以有效地消除铁芯直线电机中由齿槽力等引起的推力波动,实现平滑的推力。
(3)每一相绕组由两组线圈构成,且这两组线圈的绕向相反,因此通电线圈的磁场不会明显影响气隙磁场的分布。
(4)该直线电机的工作原理本质上与音圈电机类似,操作简单,易于理解。但由于可以拼接多个磁体模块以及换相过程,因此和音圈电机相比,可以实现较长的行程。

表1 直线电机结构参数值

图2 直线电机气隙磁场分布图
根据电压平衡方程以及牛顿第二运动定律,建立直线电机的数学模型,如式(1)所示。

(1)
式中,F是总和扰动力,包括摩擦力Ff、由换相引起的推力波动Fr以及干扰力Fd,m是运动部分的总质量,i是相电流,Kf电磁推力系数,R是相电阻,L是相电感,Ke是反电动势系数,x是运动位移,u是相电压。
数学模型中各参数的值通过辨识得到,具体取值如表2所示。

表2 直线电机数学模型参数辨识值
2 分数阶自抗扰点位控制系统设计
直线电机分数阶自抗扰点位控制系统如图3所示,分数阶自抗扰控制器(Fractional-Order Active Disturbance Rejection Controller,FO-ADRC)作用于位置环,包括跟踪微分器、加速度前馈环节、扩张状态观测器和分数阶比例微分控制器;电流环由扩张状态观测器和比例控制器组成。

图3 直线电机分数阶自抗扰点位控制系统
根据式(1),可以将被控对象简化成二阶系统,如式(2)所示:

(2)

2.1 跟踪微分器TD
跟踪微分器(Tracking Differentiator,TD)的作用是为目标位置安排过渡过程,过渡光滑,避免超调。离散化的TD如式(3)所示。
(3)
式中,h是采样周期,k是第k个采样时刻,x1为目标位置安排的过渡过程,x2是过渡过程的微分,fhan(x1(k)-xd(k),x2(k),r,h0)为非线性函数,其表达式如式(4)所示。

(4)
式中,r和h0是参数,a和d的定义如式(5)所示。

(5)
2.2 扩张状态观测器ESO
扩张状态观测器(Extended State Observer,ESO)用来观测和估计系统的总和扰动。离散化的ESO如式(6)所示:
(6)
式中,h是采样周期,k是第k个采样时刻,z1,z2和z3是状态变量,β01,β02和β03是参数,非线性函数的表达式如式(7)所示。

(7)
式中,α和δ是参数,并满足条件α<1和δ=j·h,j= 1, 2, 3, …。
2.3 分数阶比例微分控制器FOPD
分数阶比例微分控制器FOPD(Fractional Order Proportional Derivative Controller,FOPD)与传统整数阶比例微分控制器相比,增加了可调的微分阶次,具体表达式如式(8)所示。
C(s)=Kp(1+Kdsμ)
(8)
式中,Kp和Kd是控制器参数,s是拉普拉斯算子,μ是可调的微分阶次,取值范围在0~1之间。
3 对比仿真研究
在MatLab/Simulink软件中建立直线电机点位控制系统仿真模型,取目标位置分别为10 mm和30 mm,则由跟踪微分器TD安排的过渡过程如图4所示。
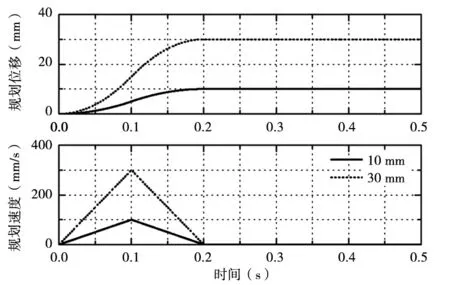
图4 由跟踪微分器安排的过渡过程
参考加速度前馈环节(Reference Acceleration Feedforward,FF)如式(9)所示。
(9)
式中,r分别取1和3,对应于目标位置xd= 10 mm和30 mm。
这里,分别采用如下三种控制器进行对比仿真研究。
(1)常规自抗扰控制器ADRC,由扩张状态观测器、跟踪微分器以及非线性比例微分器构成。非线性比例微分器的表达式如式(10)所示。
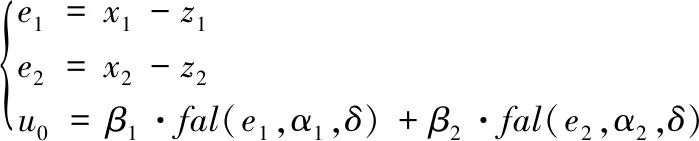
(10)
各控制器参数的取值分别如下:h0=0.0002,b= 72,h=0.0002,β01=5000,β02=220970,β03=15967450,δ=0.005,β1=30000,β2=10000,α1=0.75,α2=1.5,δ=0.005。
(2)传统比例积分微分控制器加参考加速度前馈环节PID+FF。内部电流环为比例积分器,控制器参数为Kp=150,Ki=10000,位置环PID控制器参数为Kp=34000,Ki=1000,Kd=100。
(3)分数阶自抗扰控制器FO-ADRC。控制器的各参数取值分别为h0=0.0002,b=72,h=0.0002,β01=5000,β02=220970,β03=15967450,δ=0.0002,Kp=100000,Kd=300,μ=0.835,分数阶微分离散化形式的z传递函数的阶次为5。β11=40000,β12=5000000,b1=226,h1=0.000025,δ1=h1,Kp=40000。
3.1 未加负载时的点位运动性能对比
未加负载时,三种控制器下直线电机点位运动性能对比如图5所示,其中纵坐标表示实际运动与跟踪微分器安排的过渡过程目标运动之间的误差。
由图5可知,分数阶自抗扰控制器FO-ADRC的运动误差最小,在±1μm之内。
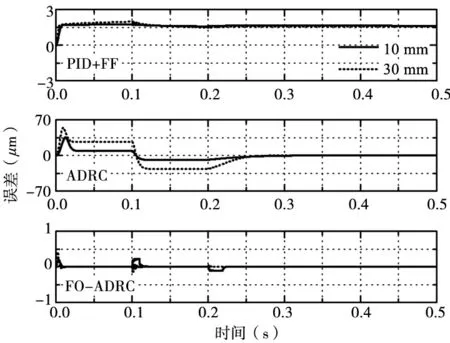
图5 未加负载时直线电机点位运动性能对比
3.2 增加负载时的点位运动性能对比
给直线电机增加18kg的负载,则三种控制器下直线电机点位运动性能对比如图6所示。由图6可知,直线电机增加负载后,也即直线电机的质量参数m发生了变化,三种控制器中仍然是分数阶自抗扰控制器FO-ADRC的运动精度最高。

图6 增加负载时直线电机点位运动性能对比
3.3 存在外部扰动时的点位运动性能对比
给直线电机运动控制系统施加一个10N的外部扰动力,作用时间为0.3s~0.4s之间,三种控制器下直线电机点位运动性能对比如图7所示。

图7 外部扰动时直线电机点位运动性能对比
由图7可知,当存在外部扰动力作用时,系统均出现了明显的运动误差,其中分数阶自抗扰控制器FO-ADRC的误差最小,同时也说明FO-ADRC的抗干扰能力最强。
4 实验研究
直线电机点位运动控制实验系统如图8所示。主控芯片采用DSP320F2812,相电流由霍尔传感器检测,位移由光栅尺及其读数头检测,其中光栅尺的分辨率是1μm。测量结果通过以太网传送至上位机中进行显示和分析。

图8 直线电机点位运动控制实验系统
实验结果如图9所示。

(a) 目标位置10mm

(b) 目标位置30mm图9 直线电机点位运动实验结果
可以看出,分数阶自抗扰控制器FO-ADRC在实际系统中的控制效果也很好,在到达目标位置处有微量的超调,最终的定位误差均为1μm,这也正是位移传感器光栅尺的分辨率。
和仿真模拟结果相比,实验结果的精度没有仿真模拟的高,这是因为控制器硬件DSP320F2812的计算能力以及传感器测量精度的局限性造成的,并且实际系统中存在较为复杂的摩擦力作用。
5 结论
鉴于直线电机点位控制系统易受到外部扰动力以及系统负载参数变化的影响,基于分数阶微积分原理,运用自抗扰控制技术,提出了基于分数阶自抗扰的直线电机点位运动控制器。与常规自抗扰控制器和传统比例积分微分控制器加参考加速度前馈环节进行对比仿真研究,并通过实验验证了所提控制算法的可行性、有效性和优越性。
提出的分数阶自抗扰控制算法具有控制精度高、抗干扰能力强和易于工程实现等特点,可有效实现直线电机点位控制,性能优越。将来可结合基于摩擦力模型的前馈控制,进一步提高运动控制性能。新型直线电机以及提出的分数阶自抗扰控制算法,为直线点位运动场合提供了新的方案。
