基于磁流变减摆器的修正Bouc-Wen模型参数辨识*
2019-05-24王恕浩
田 静,王恕浩
(中国民航大学 航空工程学院,天津 300300)
0 引言
近二十年来,很多学者[1]致力于将磁流变减摆器应用于民航领域。磁流变减摆器是一种智能的半主动控制减摆器,不用外界输入能量,根据飞机实时的速度及摆振情况,调节输入电流的大小,即可产生相应的阻尼力来控制摆振。虽然磁流变减摆器有这样的优点,但在实际应用中,建立准确的阻尼力数学计算模型是其中的一个难点。磁流变液在低速下有很强的动力学滞回特性,建立的模型能否准确地体现这一特性,成为评价该模型优劣的指标之一。
磁流变减摆器的参数化模型,参数个数固定,各参数都有相应的物理意义,诸多学者[2-13]都对此做过研究。其中Bingham模型[8]及非线性双粘性模型形式简单,但无法准确地体现磁流变减摆器在低速时的动力学滞回特性,而修正Bouc-Wen模型在体现动力学滞回特性方面有着很强的优势。相对Bouc-wen模型,修正Bouc-Wen模型形式更加简单。修正Bouc-Wen模型首先由美国华盛顿大学的Dyke团队[14]提出,国内关新春和欧进萍[15]用该模型来拟合磁流变减震器的阻尼力,阻尼力-位移曲线拟合得较好,但不能很好地反映磁流变阻尼器在低速下的动力学滞回特性。
本文在自行设计的磁流变减摆器阻尼力特性实验数据基础上,基于修正Bouc-Wen模型,建立阻尼力数学计算模型,分析模型中各参数对滞回环的影响,并对模型进行参数辨识。利用MATLAB对模型进行仿真,将结果与实验数据进对比,曲线拟合程度较高,表明所建立的模型能准确体现磁流变减摆器低速下的动力学滞回特性。
1 实验数据的获取
实验测试对象为某型无人机设计的磁流变减摆器,实物见图1,结构原理见图2。将图1在阻尼特性实验平台上测试,实验平台见图3。在正弦波位移激励(激励频率为3 Hz,激励振幅为1.4 mm)下,输入电流分别为0 A、0.4 A、0.8 A和1.2 A,获得实验数据。阻尼力-位移关系曲线和阻尼力-速度关系曲线分别如图4、图5所示,可以发现,阻尼力随电流增大而增大,磁流变减摆器在低速下有明显的动力学滞回特性。
图1 磁流变减摆器实物图

图2 磁流变减摆器结构原理图

图3 阻尼特性实验平台

图4 阻尼力与位移关系的实验数据
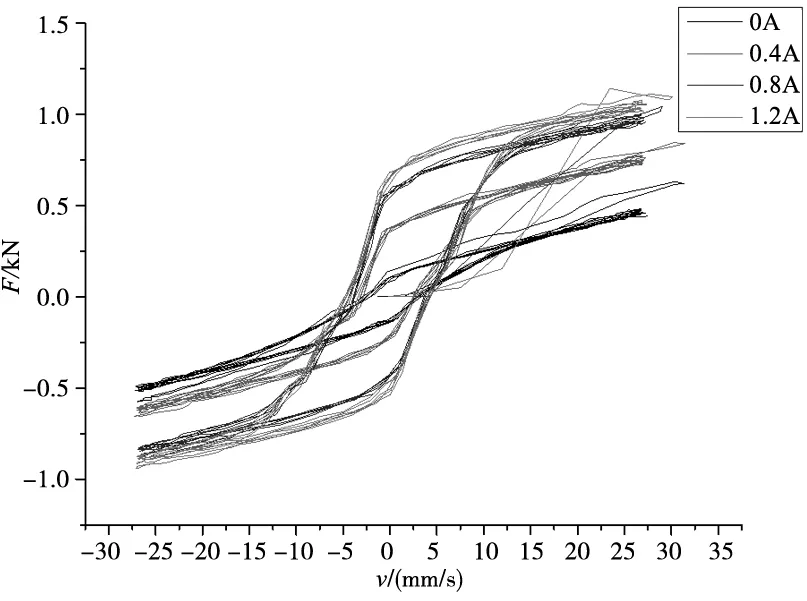
图5 阻尼力与速度关系的实验数据
2 修正Bouc-Wen模型
修正Bouc-Wen模型最初由Dyke为首的团队结合Spencer现象模型所提出,模型将磁流变减摆器阻尼力视为粘滞力和Bouc-wen滞变阻尼力之和的形式,应用Bouc-Wen滞变力模拟磁流变液在低应变下的黏弹性以及高应变下的库伦特性所表现出的复杂非线性特性。其理论模型如图6所示。

图6 修正Bouc-Wen模型
阻尼力计算的数学方程如式(1)所示:

(1)
(2)
式中,F为磁流变减摆器输出的阻尼力;c(i)为磁流变液的粘性阻尼系数;x为减摆器的相对位移;A(i)为滞回力在减摆器总的阻尼力中所占的比重;z为考虑磁流变材料的滞回特性引起的滞变位移;γ为与滞回环大小有关的调节参数;n为滞回环的圆滑度系数;β为与滞回环大小有关的调节参数;α为与最大阻尼力相关的参数。
3 滞回环各参数影响分析
相比不含滞回环的参数化模型,低速下能够体现磁流变减摆器的滞回特性,是含滞回环模型的长处。在对模型进行参数辨识之前,分析修正Bouc-Wen模型中参数对滞回环的影响是有必要的。
根据公式(2),输入振幅为1 mm,角频率为1 rad/s的正弦激励,分析x-z的变化曲线,γ、n、β及α对滞回环的影响分别如图7~图10所示。

图7 γ的大小对滞回环的影响
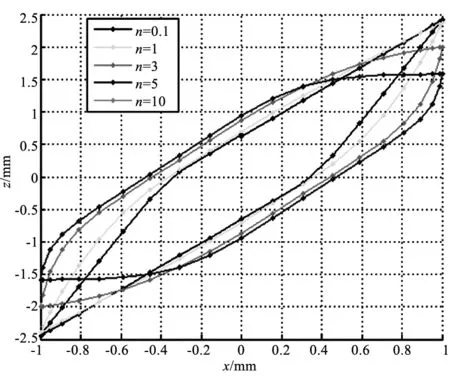
图8 n的大小对滞回环的影响

图9 β的大小对滞回环的影响

图10 α的大小对滞回环的影响
分析图7~图10可知:①随着γ的增大,滞回环发生顺时针的旋转,高度减小,且所包围面积几乎不变;②n与滞回环的光滑度有关,n越小,滞回环越光滑,所包围的面积越小;③随着β的增大,滞回环发生顺时针旋转,高度减小,包围的面积增大;④随着α的增大,滞回环大时发生逆时针旋转,所包围的面积增大。
4 修正Bouc-Wen模型参数辨识
修正Bouc-Wen模型中共有6个参数,对同一个磁流变减摆器而言,γ、n、β及α是固定的,而c(i)和A(i)则与电流相关。
由于铁磁材料的磁化曲线是非线性的,当磁场强度增大到一定值以后,磁感应强度的增长开始变得非常缓慢,逐渐达到饱和状态,所以随着电流的增大,磁流变减摆器输出的阻尼力增速是逐渐放缓的。本文将c(i)与A(i)随电流i的变化假设为一个三次多项式的关系,函数表达式可表示为:
c(i)=c0+c1·i+c2·i2+c3·i3
(3)
A(i)=A0+A1·i+A2·i2+A3·i3
(4)
其中,i为电流,c0、c1、c2、c3、A0、A1、A2、A3均为多项式的系数。
基于实验数据,利用第3部分对修正Bouc-Wen模型各参数的分析结果。在MATLAB中利用数学方法,对模型中的6个参数进行辨识。根据经验给定初始值,如表1所示,各参数的识别结果如表2所示。
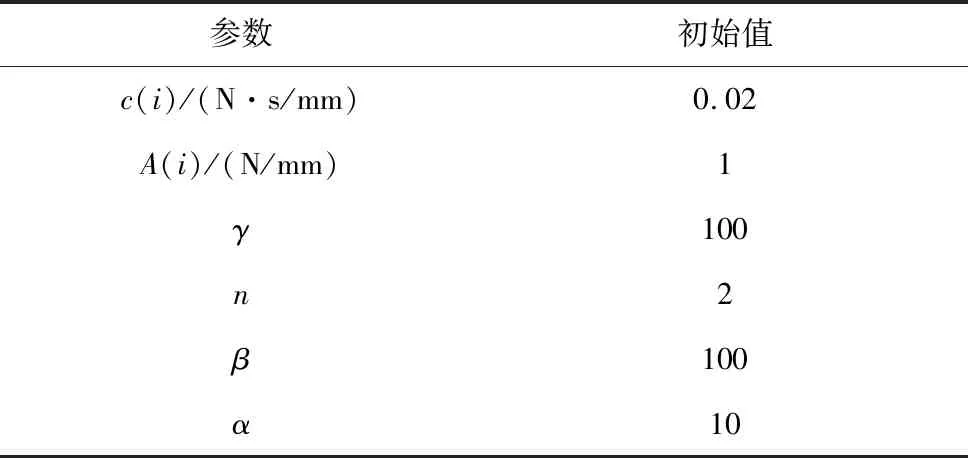
表1 各参数的初始值
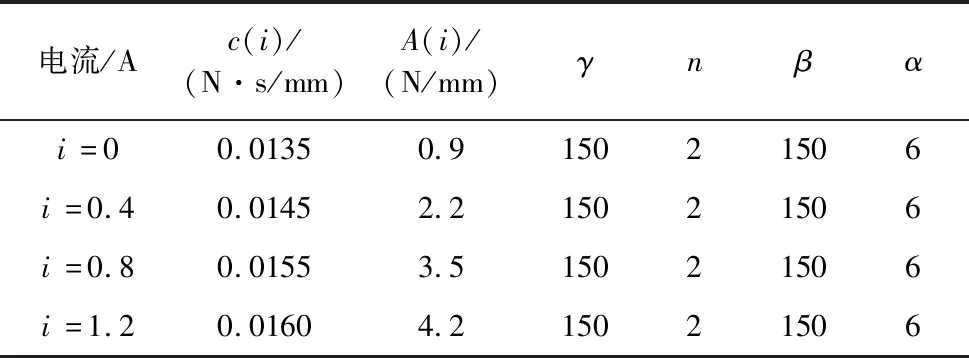
表2 各参数的识别结果
根据表2中所得到的参数c(i)和A(i)分别在不同加载电流值下的参数值,参照公式(3)和公式(4),对这4组实验数据在cftool工具箱中进行拟合,分别求出c0、c1、c2、c3、A1、A2、A3和A4的值。最终拟合得到的值的大小如表3所示,拟合曲线如图11、图12所示。
可以发现,拟合曲线中c(i)与A(i)随着电流增大,其变化趋势与前文分析一致,即电流在增大到一定的数值之后,相应的磁场强度也增长到一定的数值,此时磁场强度会逐渐达到饱和状态,即阻尼力的增长速度随电流的增大逐渐放缓。
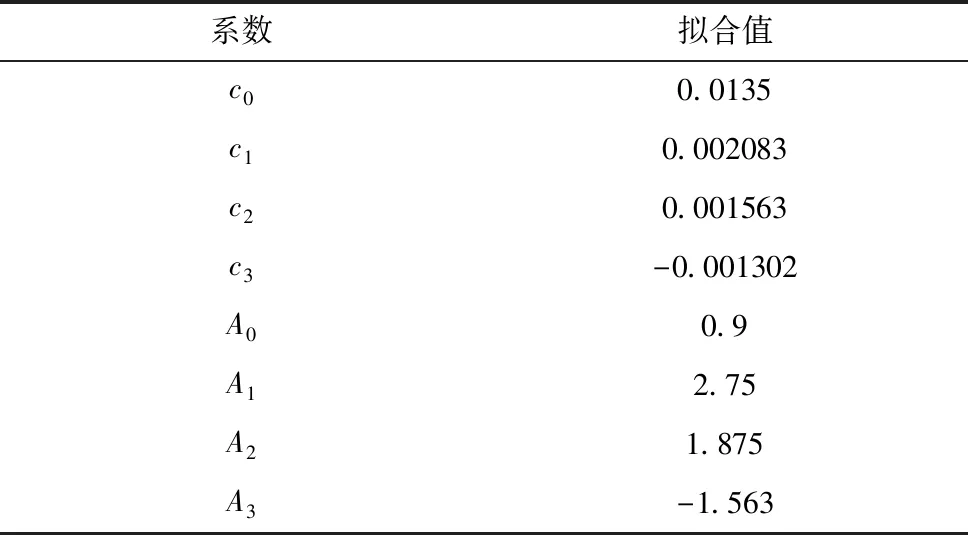
表3 公式(3)和公式(4)中的系数

图11 c(i)的拟合曲线
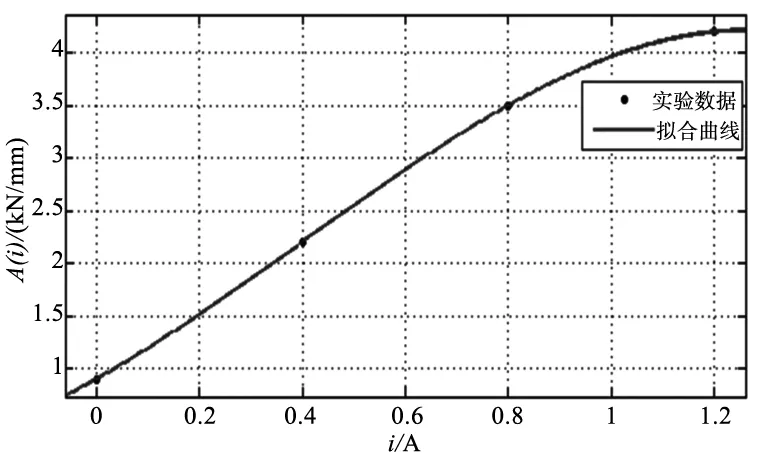
图12 A(i)的拟合曲线
5 模型验证
取实验中的正弦激励参数(激励频率3 Hz,激励振幅1.4 mm),在MATLAB中对模型进行仿真,并将仿真结果与实验数据进行对比,如图13和图14所示。

图13 阻尼力-位移曲线
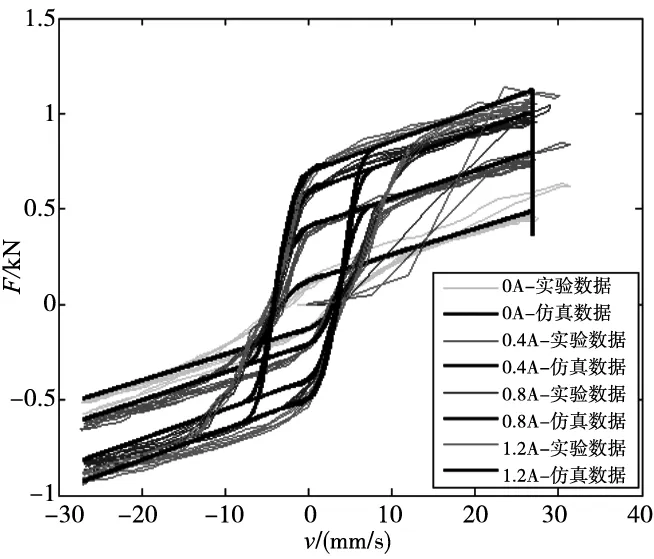
图14 阻尼力-速度曲线
由图13可以看出,建立的修正Bouc-Wen模型,能够准确地体现磁流变减摆器在不同加载电流下的最大阻尼力。在耗散能量方面,建立的修正Bouc-Wen模型能够准确地反映磁流变减摆器耗散功的能力。由图14可以看出,在动力学响应方面,建立的模型在低速下能够准确地体现磁流变阻尼器的滞回特性。
为验证模型的适用性,改变激励参数(激励频率为5 Hz,激励幅值为3 mm,输入电流为0),将结果与实验数据进行对比,如图15和图16所示。

图15 5 Hz-3 mm-0 A阻尼力-位移曲线

图16 5 Hz-3 mm-0 A阻尼力-速度曲线
可以看出,模型能够准确反映磁流变减摆器耗散能量的能量,而且可以准确地体现减摆器在低速下的滞回特性,证明所建立的修正Bouc-Wen模型具有适用性。
6 结论
磁流变液作为一种新型智能材料,在磁场作用下,阻尼参数会发生改变。通过改变磁流变减摆器电磁线圈中的电流,能够改变减摆器输出的最大阻尼力。本文基于磁流变减摆器阻尼特性实验数据,对修正Bouc-Wen模型进行参数辨识,得到阻尼力数学计算模型。将仿真结果与实验数据进行对比,可得以下结论:
(1)磁流变减摆器耗散功的能力可通过阻尼力-位移曲线包围的面积反映出来,基于修正Bouc-Wen模型得到的阻尼力计算模型能够准确地体现这种能力。
(2)磁流变减摆器在低速下滞回特性明显,基于修正Bouc-Wen模型得到的阻尼力计算模型能够准确地体现这一特性。
