冷铁分拣机器人工作站的设计与实现
2019-05-24张贝,沈勇
张 贝 ,沈 勇
(1.中铁宝桥集团有限公司资产管理部,陕西 宝鸡 721006;2.中车西安车辆有限公司资产能源管理部,陕西 西安 710000)
1 项目背景
中铁宝桥集团有限公司铸造车间主要从事高锰钢辙叉的铸造工作。在铸造过程中需要采用大量的冷铁,使被铸工件在局部位置达到急剧冷却的效果,改善工件表面的金属结构,达到线路的使用需求。根据产品工艺,平均每个工作日需要摆放及分拣一万余块冷铁。原有此项工作由人工完成,人员劳动强度极大,而且错误率较高。为了提高冷铁分拣的自动化程度,减少人工分拣的劳动强度及减少分拣出错率,以提高车间精益生产水平,设计了冷铁机器人全自动分拣工作站,包含共振动输送机、自动输送物流线、机器人视觉识别系统、分拣机器人系统、导料槽、冷铁盛装器具等并预留生产信息接口功能,以实现减人,降本,增效,提高产品品质的目的[1-3]。
2 方案总体设计依据
①冷铁分拣生产线项目技术要求、生产线布局图
②产品规格、产品图纸、生产节拍要求
2.1 分检对象

图1 冷铁外形规格
2.2 分拣需求及产能
实际使用过程中1号、2号、4号、5号冷铁用量最多。1号又包含2种,4号也包含2种,所以需要识别分拣出来的共6种。这六种基本上能满足80%以上的工作需求。
2.3 分拣效率
每天需要分拣的数量在一万块左右,两个工作班次。
2.4 工艺流程
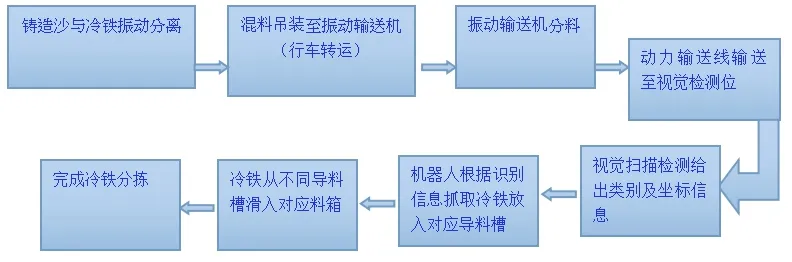
图2 工艺流程图
2.5 设备概述
该分拣机器人工作站主要用于14种冷铁的其中的6种分检工作,采用单机器人电磁铁吸盘来自动抓起工件,工件传输通过行车吊装整箱杂乱冷铁倒入振动输送机,上料滑槽具备足够刚度,确保倒入的冷铁不会对滑槽表面造成冲击变形。振动输送机将各类冷铁进行振动形成单层相对独立个体后依次进入动力传输线自动传输,工件种类判定及抓取坐标采用视觉扫描系统进行工件快速识别及定位,然后视觉扫描系统将所分析的冷铁类别及坐标值与机器人进行数据通讯,通过6轴机器人实现工件的自动抓起及分拣。

图3 冷铁分拣工作站视图
2.6 布局及上下料方式
根据现场的工艺布局,设计了一套座式搬运机器人、一套振动上料系统、一套动力传输线、一套无动力导料系统。工件的来料采用行车吊装人工导入振动分料斗,然后用过振动分料系统对冷铁进行导料导入自动传输线。
3 工件分检视觉系统
该工作站的核心部分为视觉识别,在工作节拍内能够识别物流线上的冷铁型号,并进行判断,然后将数据传输给六轴机器人进行运动。
3.1 实现分类
通过图形匹配的方式实现产品分类识别如图所示(注∶由于在图像采集时可能会采集到同一个产品的不同侧面,因此,软件中将设置六个模板,分别对应同一件产品的六个面,类型识别结果显示为同一件产品;)。
3.2 实现定位
通过视觉软件分析冷铁图像在图片中的坐标位置(目标分析:在成像清晰的条件下,在完成形状匹配之后,目标物坐标可以自动被计算出来。)
视觉系统功能简介:①抓取冷铁图像,可以是单个,也可以是多个,可以静态也可以动态;②抓取图像后,判定所拍摄的冷铁的类别;③确定冷铁在图像中所处的位置坐标;④输出坐标,与机械臂的运动控制系统坐标对接;⑤物品由传送带来料,触发信号发送给工控机,工控机控制相机软触发采图,然后对图像进行分析,视觉软件使用预设的模板对图像进行匹配,匹配出结果后将坐标及类型信息发送给机器人进行抓取。
4 振动输送机分料系统
振动输送机实现将成堆冷铁分成单层相对独立个体,实现冷铁依次分开输送之目的,以便后续视觉识别系统进行扫描。振动输送机是利用激振器使料槽振动,从而使槽内物料沿一定方向滑行或抛移。倾斜上运时,生产率随倾角增大而下降。除激振机构某些零部件外,相对转动部件很少,结构简单。当槽体向前振动时,依靠物料与槽体间的摩擦力把运动能量传递给物料,使物料加速运动,此时物料的运动方向与槽体的振动方向相同。当槽体向后振动时,物料因受惯性作用,仍将继续向前运动,槽体则从物料下面往后运动,由于运动中阻力的作用,物料越过一段槽体又落回槽体上。当槽体再次向前振动时,物料又因受到加速而被输送向前。如此重复循环,实现物料的输送。
5 机器人工作站控制系统
工作站控制系统除机器人控制柜和操作盘外,另有一套用于整套设备动作程序控制和检测的系统控制器、操作盒。该系统控制器采用三菱公司PLC作为主控单元,配套工业级触摸屏用于参数设定和状态显示。控制柜内线路具耐油性,应有线号套管,接地标志等,内部设置照明灯,以及电源插座,方便维修。控制柜设置有排风散热装置。采用彩色触摸屏人机界面对全分拣过程进行监控,当设备出现故障时,设备能自动停止并发出报警信号,故障位置人机界面显示。报警设置器控制盒上,能发出声音警告,控制柜上方设置三色状态指示灯(绿色:工作状态;黄色:等待状态;红色:故障)。
6 结语
整个冷铁分拣机器人工作站能够有效的进行冷铁的识别,并将需求的冷铁搬运至指定位置,视觉识别简单可靠,整个工件的识别与搬运动作能控制在3s内。完全满足了现场的生产需求,极具推广价值。
