基于RTS滤波的GPS+BDS 非差非组合PPP/INS紧组合模型
2019-05-16迟皓婧高周正程佳贝
迟皓婧,高周正,杨 凯,闵 于,程佳贝
(中国地质大学(北京)土地科学技术学院,北京 100083)
0 引言
连续、可靠、稳健的高精度位置服务是当前无人驾驶的基本需求。然而,全球定位系统(Global Positioning System,GPS)标准服务作为当前主要的位置服务手段,其定位精度低,且在动态情况下难以提供连续、稳健的位置结果[1]。目前,可用的基于GPS的高精度定位技术主要包括实时动态定位(Real-Time Kinematic,RTK)[2]和精密单点定位(Precise Point Positioning,PPP)[3]。其中,RTK是基于双差模式的基线解算得到高精度位置结果,但RTK的定位精度随基站与流动站间的基线距离的增加而快速降低。因此,常规RTK技术只能在小范围内提供高精度位置服务[1,4],这显然难以满足当前用户对广域作业区域的需求。而PPP技术,基于非差模式,采用国际GNSS服务(International GNSS Service,IGS)组织提供的精密轨道/钟差产品[5]和经典模型[1,3]来改正GPS的观测误差,并将未模型化的误差项和部分模型改正后的残余误差进行参数化建模,通过参数估计的方法实现了单台接收机的cm级定位解算。因此,PPP较RTK具有更广泛的应用前景和科研价值。
然而,PPP的定位性能受用户环境影响显著。在动态复杂环境下(如市区大型建筑附件、隧道、立交桥等),常出现部分或全部卫星丢失,这将明显降低PPP定位精度和连续性[1]。近些年,部分学者基于周跳修复、非差模糊度固定等理论对加快PPP重收敛进行了研究[6-7],但这些方法一方面主要基于高质量的仿真数据进行验证,不能完全反映实际情况;另一方面,这些方法不能提供卫星丢失期间的位置信息[1,8]。部分学者提出了GPS与惯性导航系统(Inertial Navigation System,INS)组合技术[8-11]可有效提高GPS定位性能,特别是紧组合模式能充分利用复杂环境下少于4颗的GPS卫星信息[8]。为此,本文采用基于GPS+BDS双系统观测数据进行PPP/INS紧组合的方案来解决上述问题。其中,采用GPS+BDS双系统数据,可有效提高动态应用中的可用卫星数,从而达到改善GPS卫星部分失锁情况下的定位几何强度(Position Dilution of Precision,PDOP)[13]、加快收敛速度和提高定位精度的目的[1]。INS则可通过力学编排处理惯性测量单元(Inertial Measurement Unit, IMU)输出的线运动信息和角运动信息,为用户提供连续的具有短期高精度的位置信息[1,12]。然而,IMU误差的时间累加性导致INS在卫星失锁期间的定位精度随时间的增加而发散[1,14]。为此,本文将RTS滤波(Rauch-Tung-Striebel Filter)理论[8,15]应用到PPP/INS紧组合算法中,以此来进一步提高动态定位性能。
本文详细介绍了基于RTS滤波的GPS+BDS 非差非组合PPP/INS紧组合模型,并利用车载实验数据分析了不同定位方法的定位、测速、定姿性能。
1 函数模型
1.1 GPS+BDS非差非组合PPP函数模型
与传统的基于双频载波和伪距的消电离层组合PPP模型不同,非差非组合PPP采用双频原始观测值形成基本观测方程。同时采用GPS和BDS观测数据时,其对应的观测方程可表示为[1,8,16]
(1)

(2)
(3)
(4)

需要注意,因信号结构、信号频率等差异,同一台GPS+BDS双系统接收机,分别进行GPS PPP和BDS PPP解算得到的接收机钟差并不相同。两者之间的差异称为系统间偏差(Inter-System Bias, ISB)[1,7],其具有时域上的稳定性。因此,在参数估计时,将BDS的接收机钟差表示为
tB,r=tG,r+ISBB-G
(5)
式中,ISBB-G表示BDS与GPS之间的系统间偏差。
此外,与传统PPP采用消电离层组合消除电离层误差的策略不同,非差非组合PPP中将模型改正后的电离层残余误差作为参数进行估计[8]。由于非差非组合PPP中待估参数个数较多,直接估计电离层参数会降低PPP解的强度和定位精度。因此,通过增加电离层虚拟观测的方式来提高PPP解的强度。首先,根据电离层的频率相关性特性,将GPS和BDS第二频率上的电离层延迟表示成第一频率上的电离层延迟
(6)
(7)
然后,将上述电离层误差改正到伪距和载波观测值中,并将残余误差建模为随机游走过程,即
(8)
(9)

同时,当前卫星钟差的解算策略使得伪距硬件延迟被消电离层组合的钟差吸收,因此在进行消电离层组合PPP解算时,可以忽略伪距硬件延迟的影响[8]。而在非差非组合PPP模式下,则需考虑伪距硬件对PPP的影响。其中,卫星端的伪距硬件延迟可采用IGS提供的卫星码间偏差(Differential Code Bias,DCB)产品进行改正,而接收机端的硬件延迟则以DCB的形式进行参数化估计[1,13]
(10)
(11)

综上,GPS+BDS非差非组合PPP的观测方程将由原始伪距和载波观测方程(式(1)~式(4))、电离层虚拟观测方程(式(8)~式(9))和接收机DCB虚拟方程(式(11))组成。观测值的先验权则采用经典的卫星高度角定权法。待估参数则包括接收机位置、钟差、系统间偏差、对流层湿延迟残余误差、电离层模型改正残余误差和每个频率上的模糊度。最终采用序贯最小二乘或扩展Kalman滤波[12]可实现非差非组合PPP的参数估计。
1.2 非差非组合PPP/INS紧组合函数模型
虽然PPP具有长期高精度定位特性,但在动态应用中,卫星信号常因大型建筑物、立交桥、树荫、隧道等遮挡而丢失,引起PPP定位不连续和降低PPP的定位精度。而INS可利用IMU测量的载体角运动和线运动信息,提供连续的且不依赖用户环境的导航结果,但INS的结果因IMU期间误差的累加而不断发散。因此,文中采用PPP与INS组合,综合利用PPP和INS的优点,克服单一系统的缺点,以获得高精度、连续的定位结果。通常,利用Kalman滤波理论[15,17]构建非差非组合PPP/INS紧组合的观测方程和状态方程
Zk=Hkxk+ηk,ηk~N(0,Rk)
(12)
xk=Φk,k-1xk-1+εk-1,εk-1~N(0,Qk-1)
(13)
式中,Zk表示量测新息向量;Hk表示设计系数矩阵;ηk表示零均值且方差为Rk的量测噪声;xk表示状态参数向量;Φk,k-1表示状态转移矩阵;εk-1表示零均值且方差为Qk-1的状态参数驱动噪声。其中,观测新息向量可表示为
(14)

在进行INS预测时,通过INS更新的IMU中心处的位置和速度信息(通过INS力学编排更新)与卫星位置和速度信息(由精密轨道计算)预测理论上的伪距、载波和多普勒观测。由于IMU中心与接收机天线相位中心不一致,因此在数据处理时需要考虑因测量中心不同而引起的杆臂误差,即先将IMU中心的位置和速度转换到接收机天线相位中心[8-12]
(15)
(16)

PPP/INS紧组合的状态参数则由两部分构成,即PPP中的全部参数和INS的全部参数
(17)


据此,对式(14)在式(17)处进行泰勒级数展开,即可得到Hk阵。Φk,k-1则可根据状态参数的随机模型获得。本文采用PSI误差角模型描述紧组合中的位置、速度和姿态变化;将IMU传感器误差建模成一阶高斯马尔科夫过程,将对流层/电离层残余误差、接收机DCB和系统间偏差建模成随机游走过程;将载波模糊度建模成随机常数[1, 8]。据此,可实现状态预测[15, 17]
xk,k-1=Φk,k-1xk-1
(18)
(19)
和状态更新
xk=xk,k-1+Kk(Zk-Hkxk,k-1)
(20)
(21)
式中,Kk和I分别表示增益矩阵和单位矩阵。
1.3 RTS滤波函数模型
由于Kalman滤波是利用当前时刻(k)的观测数据以及k之前的状态信息(xk-1和Pk-1)实现对当前状态参数信息的估计(xk和Pk)。在数据后处理时,可采用平滑滤波器算法以充分利用GNSS和INS所有可用观测新息,实现正向滤波解和方向滤波解的最优组合,达到改善GNSS/INS组合导航定位性能的目的。
本文采用RTS固定平滑区间的线性平滑滤波器,不须直接进行Kalman滤波反向解算,即能实现等效于正向滤波解与反向滤波解的最优组合。RTS的数学模型可表示为[12, 15]
xk/N=xk/N+Jk(xk+1/N-xk+1/k)
(22)
(23)
(24)
式中,N表示平滑区间内历元总个数,k=N-1,N-2, …表示区间历元时刻。由于PPP/INS紧组合中的航向角观测性较弱,通常航向精度比横滚角和俯仰角精度差[1]。而采用RTS滤波,可明显提高航向角精度。
1.4 算法基本架构
基于RTS滤波的GPS+BDS PPP/INS紧组合算法流程如图1所示。首先,利用PPP解算的位置和速度、IMU的静态数据和IMU性能参数(表1)进行姿态对准和滤波器初始化,包括Kalman滤波器的初始状态向量、对应的先验方差和状态噪声矩阵[1]。根据初始状态信息,利用获取的GPS+BDS/INS数据进行PPP/INS解算。由于IMU数据采样率远高于GPS/BDS,通常先利用经过误差补偿后的IMU数据进行INS力学编排[9]解算,获取当前IMU历元的载体信息,并利用Kalman状态更新方程,计算当前状态向量对应的方差-协方差矩阵。然后,进行GPS/BDS可用性检测。若当前IMU历元没有可用的GNSS数据,则直接输出INS力学编排更新的导航结果;若当前历元GNSS数据可用,则进行PPP/INS紧组合解算,并将解算的IMU误差及其他导航参数的改正新息反馈给下一个IMU历元,以此进行IMU误差补偿和导航信息修正[8-12]。所有历元完成解算之后,利用保存的正向Kalman状态向量及方差信息,根据式(22)~式(24)进行RTS平滑。
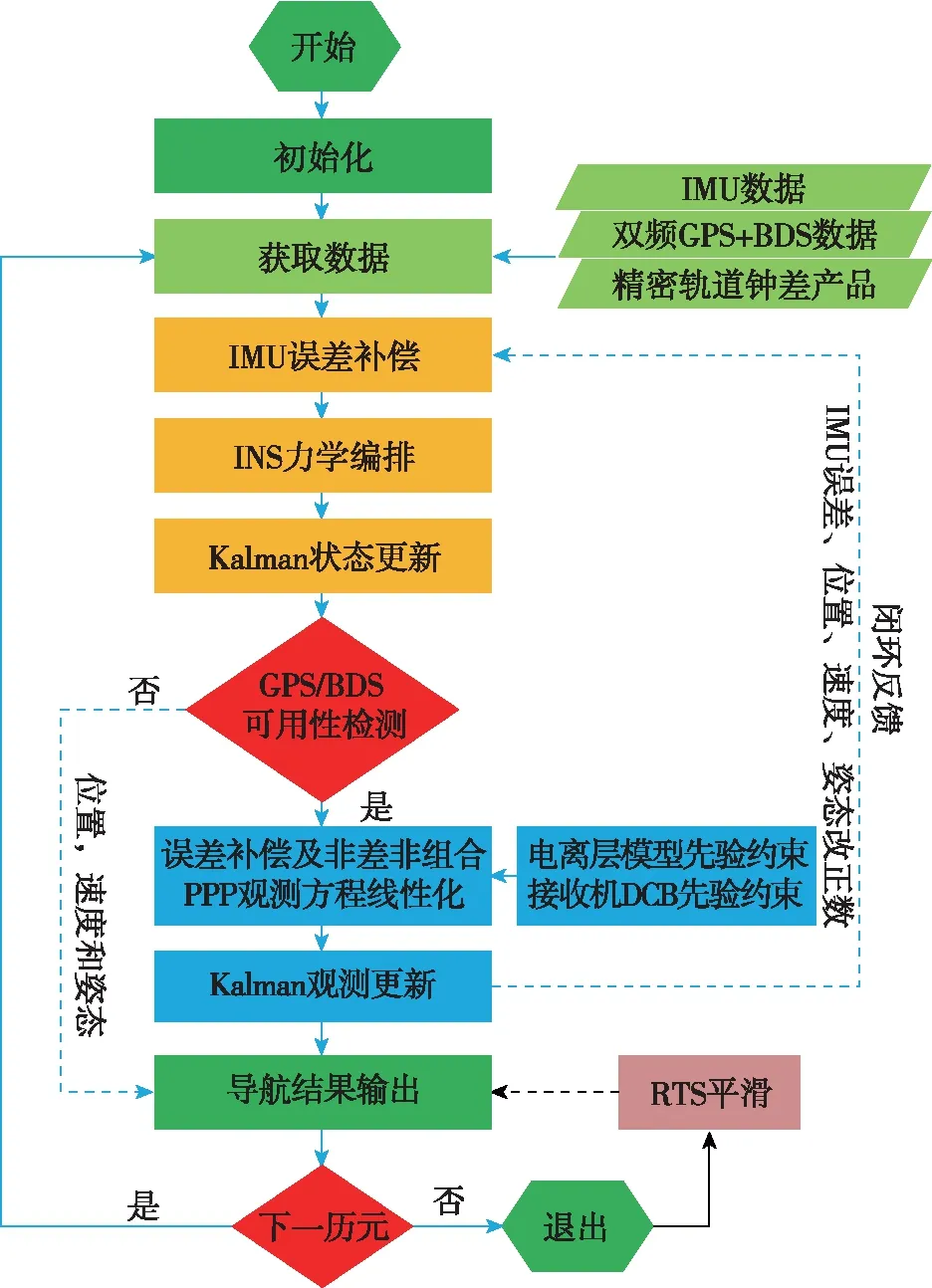
图1 基于RTS滤波的GPS+BDS PPP/INS紧组合算法架构图Fig.1 Algorithm structure of the RTS smootherbased GPS+BDS PPP/INS tight integration
2 试验论证与结果分析
为验证本文的GPS+BDS非差非组合PPP/INS紧组合模型性能并分析其在观测条件良好和卫星信号短时间内完全失锁时的定位性能,本文对2013年在武汉市采集的一组车载GPS+BDS/INS数据(天宝R9接收机和武汉迈普时空POS1100 低精度IMU(http://www.whmpst.com/cn/imgproduct.php?aid=38)和诺瓦泰FSAS光纤IMU(https://www.novatel.com/assets/Documents/Papers/FSAS.pdf)车载数据)进行处理分析(IMU参数和测试轨迹图分别如表1和图2所示)。其中,GPS数据采样率为1Hz,2款IMU数据采样率为200Hz。在测试之前,以IMU为中心,精确测量接收机天线至IMU的杆臂值。
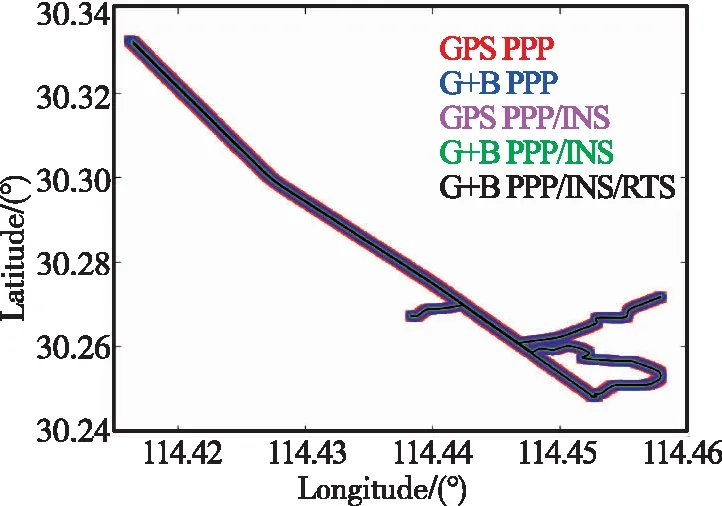
图2 不同定位模式下的车载测试轨迹图Fig.2 Trajectories calculated by different positioning modes
2.1 数据处理策略与卫星观测条件
数据处理时,分别采用5种定位方法进行定位解算,即GPS PPP、GPS+BDS PPP、GPS PPP/INS紧组合、GPS+BDS PPP/INS紧组合和基于RTS平滑滤波的GPS+BDS PPP/INS紧组合。采用武汉大学卫星提供的GPS/BDS精密轨道/钟差产品,IGS的卫星DCB产品、电离层产品、接收机和卫星天线相位中心偏差产品、极移产品消除轨道误差、电离层误差、卫星硬件延迟偏差、接收机和卫星天线相位中心偏差/偏移误差。采用Saastamoinen天顶延迟模型和全球投影函数(Global Mapping Function,GMF)削弱对流层误差对定位的影响[18]。其他误差如地球自转、相对误差、固体潮、相位缠绕等均采用经典模型进行修正[1,7]。为剔除低精度观测值对PPP定位精度的影响,将卫星截止高度角设置为10°。在INS数据处理时,将IMU零偏和比例因子建模从一阶高斯马尔科夫过程进行估计,而划桨效应、旋转效应和圆锥效应则采用经典模型进行补偿[12]。数据分析时,采用诺瓦泰公司的Inertial Explorer软件的GPS+GLONASS RTK/FSAS平滑结果作为位置、速度、姿态的参考基准。
图3和图4分别表示本次实验期间所观测到的GPS卫星和BDS卫星星空图及其对应的卫星数和PDOP值时间序列图。据图3可清晰看出,本次实验中GPS卫星空间分布要优于BDS。因为,实验期间,BDS的空间星座主要由5颗GEO卫星、5颗IGSO卫星和4颗MEO卫星构成。这使得通常观测到的卫星以GEO和IGSO卫星为主,而GEO几乎成一条直线分布在赤道上空。统计结果表明,采用GPS时,平均可用卫星数和PDOP值为8.5和2.1;采用GPS+BDS时,平均可用卫星数和PDOP值为15.0和1.7。这表明,采用双系统数据时,可明显改善可视卫星数和定位几何强度[13]。例如,在65min附近,单GPS的可用卫星数是4,这时其PPP定位精度将明显降低(图5);而采用GPS+BDS时,其可视卫星数增加到10,定位精度也得到明显改善。
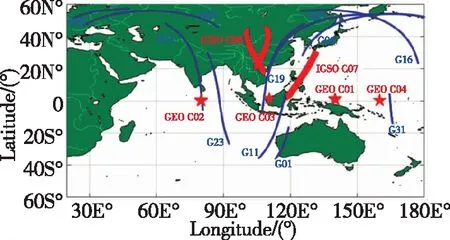
图3 车载测试中可视GPS和BDS卫星星空分布图Fig.3 Satellites sky-plot of the visibleGPS and BDS during the test
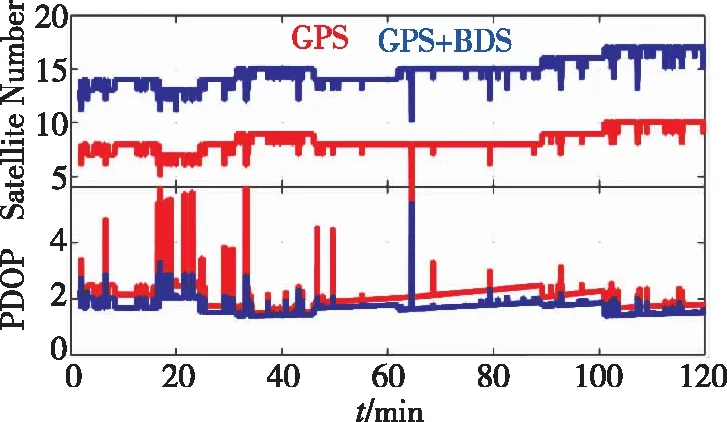
图4 可视卫星数及对应的PDOP值Fig.4 Visible satellite number and PDOP
2.2 开放天空条件下的定位-测速-定姿性能分析
首先,对开放条件下不同模式的性能进行分析。由于PPP和PPP/INS紧组合需要收敛时间,因此在数据分析时,初始15min数据没有参与均方根(Root Mean Square,RMS)统计。图5表示不同定位模式的位置解算结果与参考值作差,并转换到n系中的位置误差时间序列图,其对应的统计结果如表2所示。从中可以看出,在PPP模式下,采用GPS+BDS双系统数据时,其定位精度(4.9cm、9.6cm、25.1cm)较单使用GPS时(14.0cm、19.9cm、32.3cm)得到明显改善;在北-东-高3个分量的改善幅度达到65.0%、49.2%和22.3%。其原因,一方面采用GPS+BDS时,可用卫星数大幅增加,同时PDOP明显改善,从而加快了PPP的收敛速度和提高了定位精度;另一方面,采用双系统观测数据,可弥补单GPS观测不足引起的PPP重收敛(对比图4和图5中65min时刻的GPS卫星数和定位误差变化)。
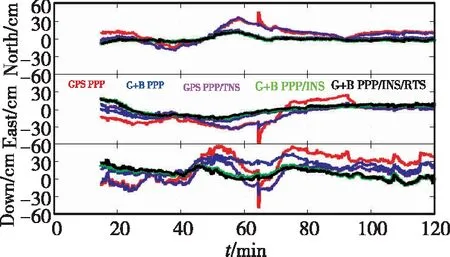
图5 PPP和PPP/INS的位置误差时间序列图Fig.5 Position error time series diagram ofPPP and PPP/INS
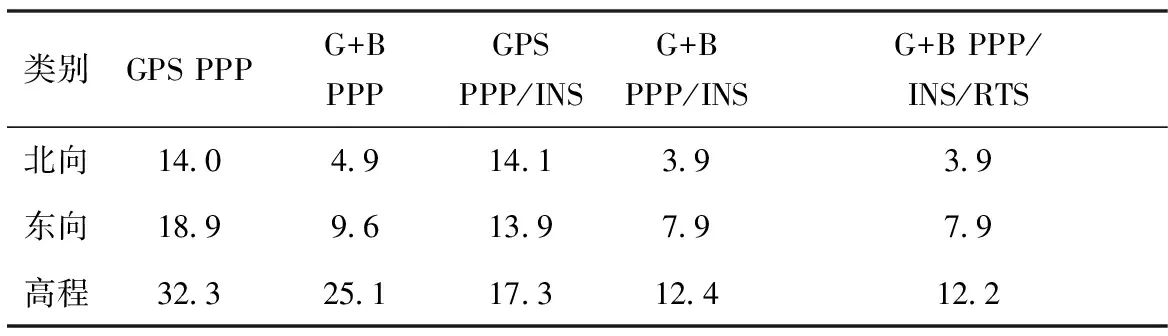
表2 不同定位模式的位置误差RMS统计结果
在PPP/INS紧组合模式下,BDS对GPS PPP/INS紧组合定位精度的改善模幅度为72.3%、43.2%和28.3%,与PPP模式下基本一致。因为INS对PPP的增强作用,主要表现在3个方面,一方面INS自主定位特性可弥补卫星短时间内失锁引起的定位结果不连续问题,并在短时间内提供高精度位置结果;另一方面,INS力学编排具有低通滤波特性,可显著降低GPS/BDS观测噪声对定位精度的影响;此外,INS定位精度随时间的增加而降低,其长期定位精度由GPS/BDS PPP定位性能决定。因此,BDS对PPP和PPP/INS紧组合定位精度的改善效果保持一致。但RTS对卫星观测条件良好的PPP/INS紧组合的定位精度提高不明显。此外,BDS对PPP和PPP/INS紧组合定位精度的改善作用,在北向比东向和高程向更明显。这与实验开展期间北斗区域系统的卫星星座构成密切相关。
INS对PPP高程方向的定位精度改善比平面明显。其原因在于,PPP模式下,可视卫星几乎很少分布在测站天顶方向,使得高程观测性很弱。而在PPP/INS紧组合中,六轴的IMU传感器增加了对高程方向的直接观测,从而使得高程的估计精度大大提高。
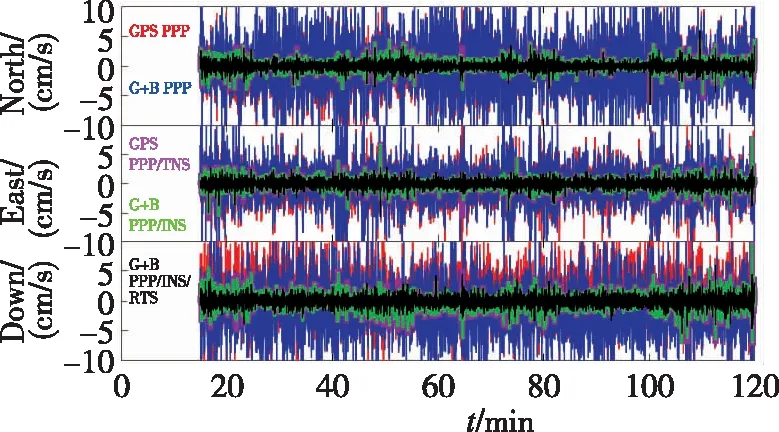
图6 PPP和PPP/INS的速度误差时间序列图Fig.6 Velocity error time series diagram ofPPP and PPP/INS
不同数据处理模式的测速结果如图6所示,其对应的统计结果如表3所示。图6中,红色和蓝色线分别表示GPS PPP和GPS+BDS PPP的测速误差,粉色和绿色线条分别表示与之对应的PPP/INS紧组合测速误差,黑色线表示基于RTS平滑滤波的PPP/INS紧组合测速误差。从图6中可以明显看出,PPP/INS紧组合的测速精度(粉色和绿色)远优于基于多普勒观测的PPP测速结果(红色和蓝色)。而在PPP模式下,采用单GPS数据和采用GPS+BDS双系统的测速结果精度差异不明显(小于5mm/s,见表3)。在PPP/INS紧组合模式下,BDS对测速精度的改善亦不明显(见表3)。而在采用RTS滤波后,测速精度提高显著。根据表3统计结果可知,北-东-高3个方向的测速精度从GPS PPP模式下的4.5cm/s、3.7cm/s、4.7cm/s 提高到GPS+BDS PPP/INS紧组合模式下的0.8cm/s、0.8cm/s、1.2cm/s,分别提升了82.2%、78.4%和74.5%。而RTS平滑后的测速精度进一步提升了25.0%、12.5%和33.3%,达到0.6cm/s、0.7cm/s和0.8cm/s。
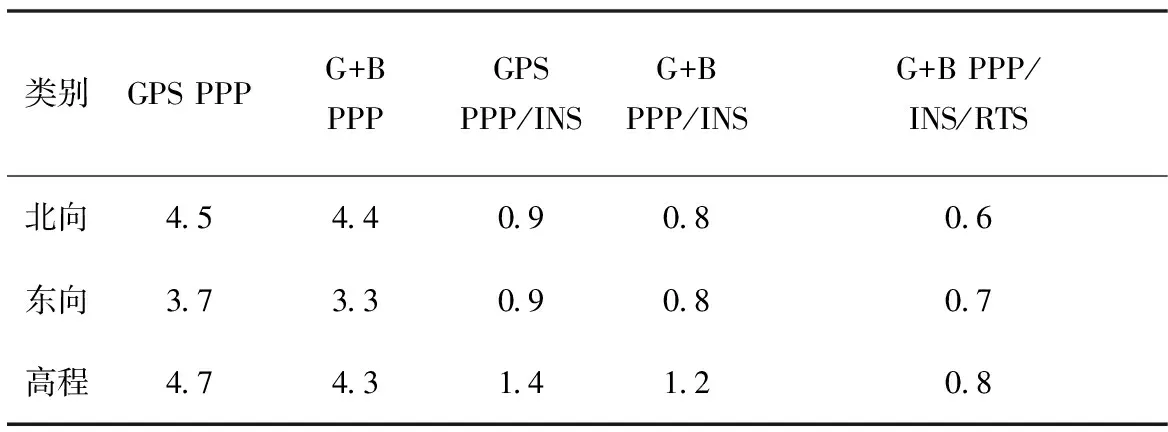
表3 不同定位模式的速度误差RMS统计结果
因为PPP模式下,测速精度主要取决于多普勒观测精度。在当前多普勒观测噪声条件下,多普勒测速精度只能达到数cm/s的精度[1]。而GPS多普勒观测精度与BDS多普勒观测精度基本在同一精度水平,因此即使采用BDS+GPS,测速精度亦没有显著改善,这一点与PPP定位不同。而与INS组合之后,可直接利用INS的低通滤波特性,有效消除多普勒噪声对测速精度的影响。同时,IMU的三轴加速度计形成了对三维速度的直接观测,从而保证了GPS/BDS与INS融合后,测速精度大幅提升。同时,由于RTS滤波可利用当前观测历元之后的所有历元状态信息,从而进一步改善了测速精度。
图7表示三种PPP/INS紧组合模式下的姿态误差结果,其对应的RMS统计结果如表4所示。从图7可以看出,PPP/INS紧组合中的姿态精度与采用单GPS(粉色线)或是双系统GPS+BDS(绿色线)数据几乎无关。因为,定姿精度与IMU传感器性能以及载体的机动情况直接相关[1]。而图2所示的轨迹图亦表明本次测试的航向机动较弱,且对于同一组GPS或GPS/BDS数据,相同时刻的机动性是相同的。因此,测试中定姿精度主要由IMU性能决定。同时如图7,航向角(heading)误差明显大于横滚角(roll)和俯仰角(pitch)误差。因为航向观测性较弱,在没有足够丰富的机动情况下,航向角精度会比其他2个姿态角精度差。但航向角精度在进行RTS平滑之后(黑色线)有了显著改善。根据表4的统计结果可知,横滚、俯仰和航向角RMS从GPS PPP/INS紧组合模式下的0.328°、0.102°、0.432°提高到RTS平滑 GPS+BDS PPP/INS紧组合的0.314°、0.084°、0.330°。
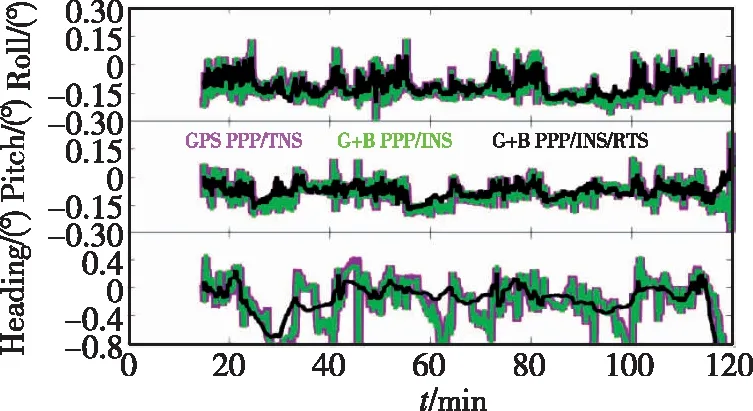
图7 PPP/INS的姿态误差时间序列图Fig.7 Attitude error time series diagram ofPPP and PPP/INS
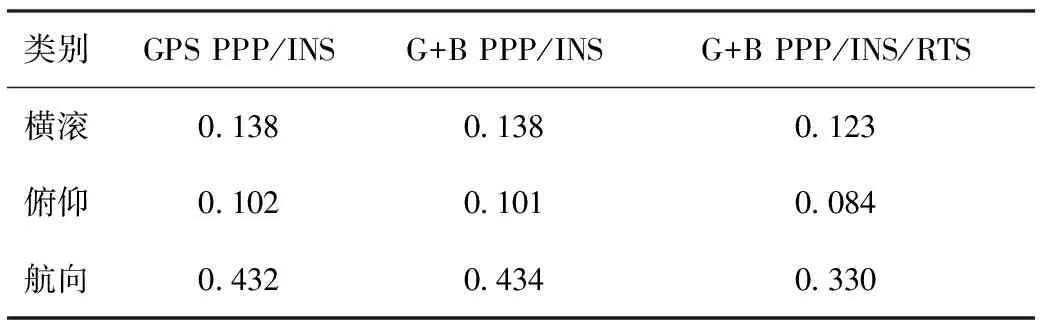
表4 不同定位模式的姿态误差RMS统计结果
2.3 卫星信号短期失锁条件下的定位-测速-定姿性能分析
在上述实验数据的基础上,通过对原始GPS/BDS观测数据进行信号失锁仿真,分析卫星信号短时间失锁条件下不同模式的性能。在卫星信号失锁仿真时,每20min设置一次时长为5s的卫星信号全部丢失现象,然后按照五种模式进行数据处理。不同模式下的定位、测速和定姿误差如图8~图10所示。
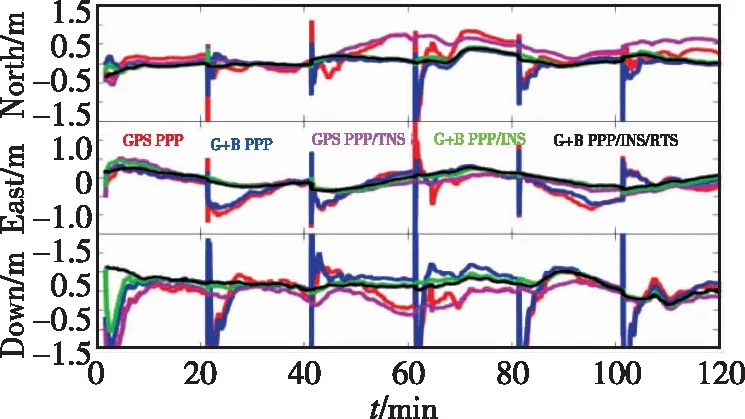
图8 卫星信号失锁条件下PPP和PPP/INS的位置误差图Fig.8 Position errors of PPP andPPP/INS integrationunder the satellite outage conditions
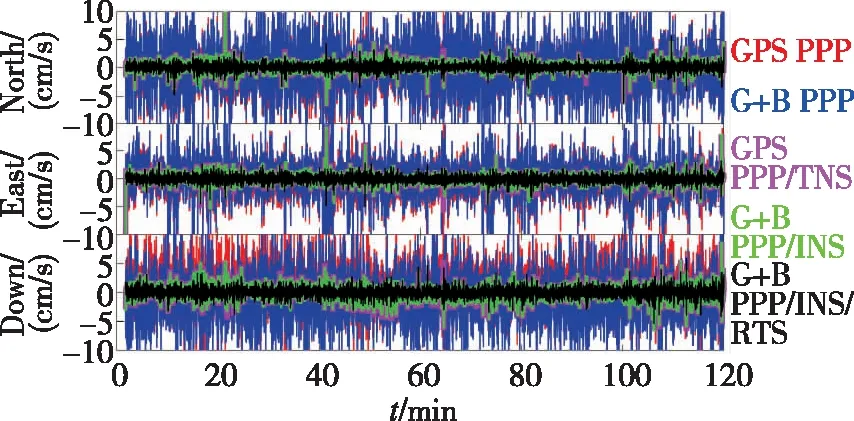
图9 卫星信号失锁条件下PPP和PPP/INS的速度误差图Fig.9 Velocity errors of PPP and PPP/INS integrationunder the satellite outage conditions
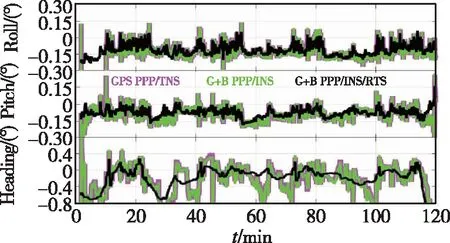
图10 卫星信号失锁条件下PPP/INS的姿态误差图Fig.10 Attitude errors of PPP/INS integrationunder the satellite outage conditions
从图8可以看出,每当出现卫星信号完全丢失时,GPS PPP(红色线)和GPS+BDS PPP都会进行重新收敛(蓝色线)。但使用GPS+BDS双系统数据时(蓝色线),PPP的重收敛速度明显比GPS PPP(红色线)快。根据表5的统计结果可知,此时BDS对GPS PPP定位RMS的改善幅度在北-东-高3个方向分别达到了46.1%、14.6%和9.2%。而在PPP/INS紧组合模式下,这种改善幅度为63.6%、13.6%和0.0%。INS对GPS PPP和GPS+BDS PPP的改善幅度为5.5%、46.0%和61.2%。RTS对PPP/INS紧组合的改善幅度为12.5%、5.3%和8.3%。与GPS PPP定位结果相比,使用基于RTS滤波的GPS+BDS PPP/INS紧组合对卫星信号频繁丢失情况下的定位改善总幅度达到了64.1%、56.1%和66.2%。此外,从图8可以明显看出,在卫星信号短时间丢失的条件下,INS可有效改善PPP的定位精度、连续性和可靠性。在卫星丢失期间,PPP无法提供定位结果,而PPP/INS紧组合则可以利用INS的自主定位特性继续在短期内提供高精度位置信息。同时,RTS滤波可以进一步提升PPP初始化期间和卫星信号丢失期间的定位性能。
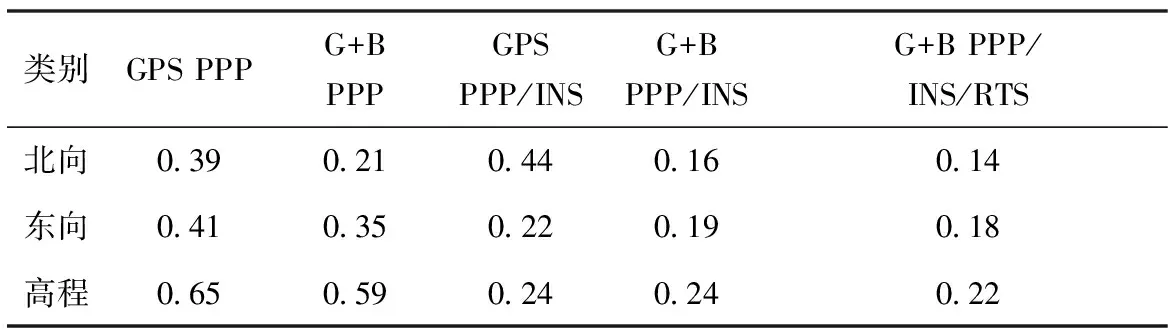
表5 不同定位模式的位置误差RMS统计结果
对比图6和图9可以看出,短时间的卫星信号失锁并不会影响PPP和PPP/INS紧组合的测速精度。其原因在于,PPP的测速精度主要受多普勒的观测精度影响;而PPP/INS紧组合的测速精度取决于IMU的性能,在短时间内(5s),速度的发散幅度很小,可以忽略[1]。同样,在卫星失锁期间,PPP无法提供测速结果,而PPP/INS紧组合则可以通过INS力学编排[12]继续提高测速结果。同理,对比图7和图10可以发现,短时间的卫星失锁对PPP/INS紧组合的定姿精度没有影响。因为在5s内,POS1100的姿态漂移小于0.03°[1]。
3 结论
本文基于RTS滤波理论和GPS+BDS原始观测数据,推导了基于RTS滤波的GPS+BDS非差非组合PPP/INS紧组合的函数模型,并通过车载数据和仿真数据分析了该算法的定位、测速和定姿精度。实验结果表明,BDS能明显改善GPS PPP的定位精度、连续性和可靠性,且这种改善作用与PPP和PPP/INS紧组合模式下的作用基本一致。在采用相同的GNSS数据时, INS能明显改善PPP的定位和速度精度。此外,在卫星短时间失锁期间,BDS、INS和RTS滤波对PPP的定位精度、重收敛速度和初始化定位精度改善明显,而对测速和定姿精度的影响可以忽略。本文的研究内容和研究成果,在当前室内外一体化高精度位置服务和无人驾驶的大趋势下,可进一步扩展应用至各与GNSS/INS相关的多源数据融合技术中,具有广泛的应用价值。
