基于Sobol法的车身抬高量的全局敏感性分析
2019-05-152
2
(1.山东理工大学交通与车辆工程学院, 山东淄博255049;2.山东管理学院机电学院, 山东济南250357)
0 引言
在汽车转向系统设计时,不仅需要考虑转向轻便性,还要考虑转向回正性能。随着助力转向系统的普及,汽车的转向轻便性得以轻松地实现,但是汽车的转向回正性能仍然需要通过前轮定位参数和主销位置参数的合理设计来保证。文献[1]中提到现实中的部分车辆存在车轮回转中心线与主销轴线没有交点的情况,该类型车辆主销位置最终产生的后倾拖距仍然保持与同类汽车相近的数值,因而也保持与一般汽车大致相同的力反馈和角反馈,但其中并未就这一情况是否对车身抬高量有影响进行分析。绝大部分文献在计算重力引起的回正力矩时都是以车轮回转中心线与主销轴线存在交点为前提[2-3],并未考虑车轮回转中心线与主销轴线不存在交点对回正力矩的影响,而在相关领域内对车身抬高量的全局敏感性分析更是鲜有研究。本文引用ISO 8855:2011标准中定义的车轮中心主销拖距(castor offset at wheel centre)来描述车轮回转中心线与主销轴线的空间位置关系,然后建立车轮运动模型并进行求解,最后应用改进的Sobol法对车身抬高量进行全局敏感性分析,旨在分析车轮定位参数和车轮中心主销拖距对车身抬高量的影响,为汽车的主销位置设计提供参考。

图1 车轮中心主销拖距示意图Fig.1 Schematic diagram of castor offset at wheel centre
1 车轮中心主销拖距的定义
根据ISO 8855: 2011标准的定义,车轮中心主销拖距是指车轮中心和主销轴线在轮胎坐标系xoz平面的投影于x轴方向的距离,用qτ表示,如图1所示。如果主销轴线的投影相对于车身在车轮中心之前,则车轮中心主销拖距为正。
2 模型建立
2.1 假设条件
本文分析采用以下一般假设[1-4]:①轮胎半径不变;②轮胎在接地面的位置以轮胎中心平面与地面的交线与车轮旋转中心线在地面投影的交点(即轮胎接地中心)来表示,不考虑轮胎和地面的面接触,也不考虑侧偏引起的轮胎接地中心的偏移;③前轮主销位置固定不动。
2.2 右前轮与主销相对位置物理模型的建立
为表示右前轮与主销的相对位置关系,建立如图2的笛卡尔坐标系,O为坐标原点,x、y、z轴方向与车辆坐标系一致。O′表示主销延长线与地面的交点,主销在xoz平面的投影为O′F′,OP表示qτ=0时的主销位置,O点表示qτ=0且其他主销位置参数不变时主销延长线与地面的交点,OP在xoz平面的投影为OF。A1、A2、A3分别表示右前轮前束角和外倾角为零时车轮中心点、右前轮只存在外倾角时的车轮中心点以及右前轮同时存在前束角和外倾角时的车轮中心点,A4表示右前轮围绕主销旋转一定角度后A3点移动到的位置。B1表示车轮与地面的轮胎接地中心点,B2表示右前轮围绕主销旋转一定角度后B1点移动到的位置。γ、β、σ、τ分别表示右前轮的外倾角、前束角、主销内倾角和主销后倾角。A1C1表示前束角与外倾角为零时的车轮回转中心线,A3R表示前束角与外倾角不为零时的车轮回转中心线。OP与A3R相交于点R,OP与A1C1相交于点Q,D点表示OF与A1C1的交点,OF与O′F′在x轴方向的距离用DD1表示。由于前轮前束角一般很小,可令DD1近似等于qτ以简化模型。
接下来根据双横臂悬架的转向节参数求车轮中心和轮胎接地中心的坐标。假设已知车轮半径r、前轮轴摆臂lb(lb表示主销轴线与车轮回转中心线在汽车坐标系yoz平面上投影的交点至车轮中心平面的距离)。双横臂悬架转向节如图3所示。

图2 右前轮与主销相对位置关系图
Fig.2 Diagram of the relative position of theright front wheel and the kingpin
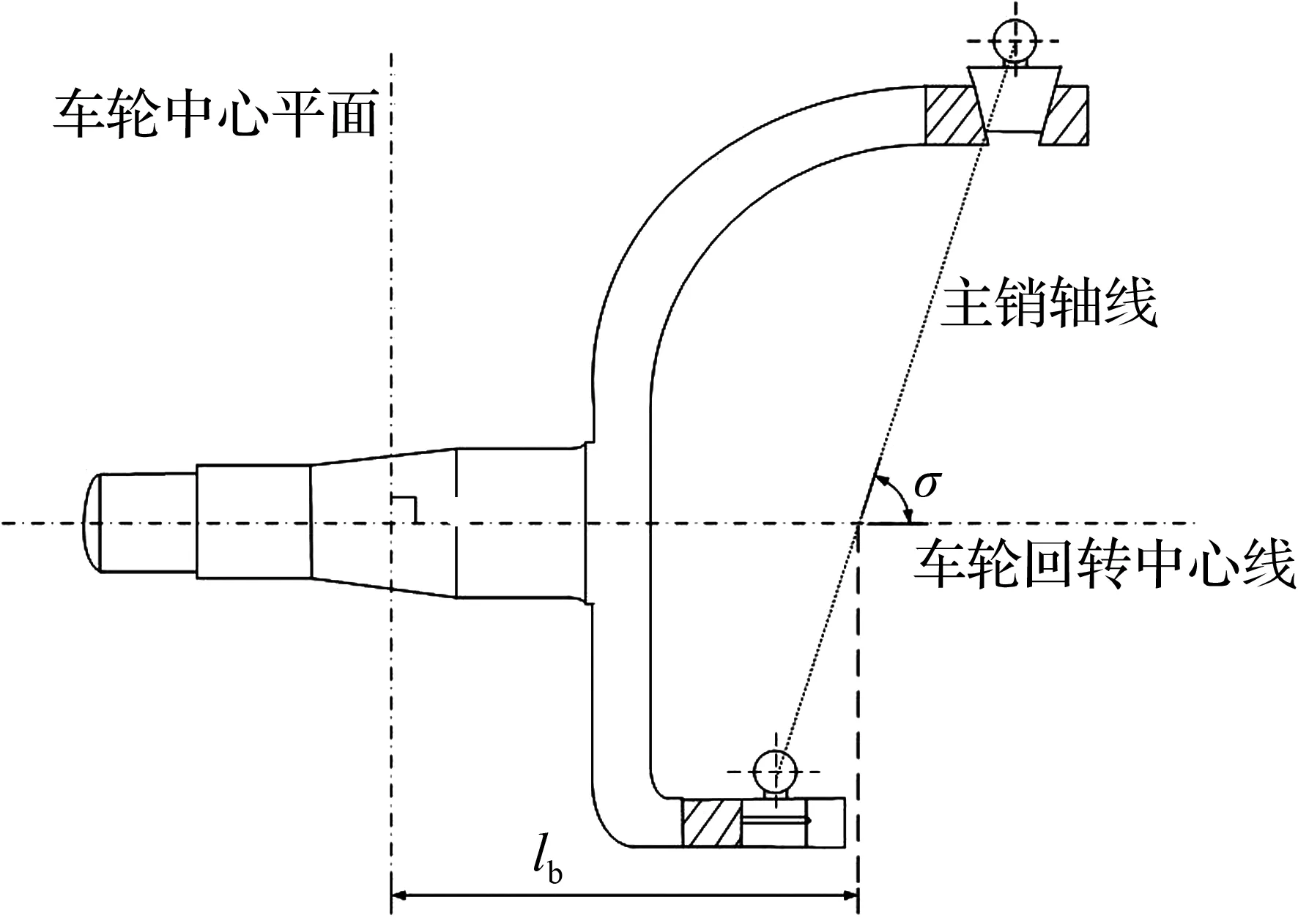
图3 双横臂悬架转向节示意图
Fig.3 Sketch of knuckle for doublewishbone suspension

图4 车轮中心与主销相对位置关系图Fig.4 Diagram of the relative position of the wheel center and the kingpin
设A3在图2坐标系中的坐标为(xA3,yA3,zA3),以Q点为坐标原点,建立如图4的笛卡尔坐标系。在考虑右前轮的外倾角和前束角后,假设车轮回转中心线与主销轴线存在交点R,R应位于主销轴线上Q点上方的某个位置。R′为R点在过A3点水平面的投影,R″为R′在通过A3点且与y轴平行的直线上的投影。A3′点为过A3点且与RR′平行的直线上一点,位于A3点上方,满足RR′=A3A3′,点A3″为点A3在过Q点水平面的投影。A3R表示前轮轴摆臂。
在A3A3′RR′平面,有:
RR′=lbsinγ,
(1)
R″R′=lbcosγsinβ。
(2)
设在图2坐标系中的R点坐标为(xR,yR,zR),有:
zA3=rcosγ,
(3)
A3A3″=r(1-cosγ),
(4)
zR=RR′-A3A3″+r=lbsinγ-r(1-cosγ)+r,
(5)
R″A3=lbcosγcosβ,
(6)
yR=zRtanσ,
(7)
xR=-zRtanτ,
(8)
yA3=-R″A3+zRtanσ,
(9)
xA3=-rtanτ+rsinγsinβ,
(10)
即A3点坐标为(-rtanτ+rsinγsinβ,-lbcosγcosβ+(lbsinγ+rcosγ)tanσ,rcosγ)。
设B1点坐标为(xB1,yB1,0),由图2的几何关系可知:
yB1=rsinγcosβ+yA3=rsinγcosβ-lbcosγcosβ+[lbsinγ-r(1-cosγ)+r]tanσ,
(11)
xB1=-rtanτ,
(12)
即B1坐标为(-rtanτ,rsinγcosβ-lbcosγcosβ+(lbsinγ+rcosγ)tanσ,0)。
2.3 车身抬高量数学模型的建立
A3点坐标由前文已知,A4点坐标可通过对A3点进行图形变换[5]得到。图形变换的基本思路:将A3点连同主销一同向x轴负方向平移距离qτ,使得主销轴线与车轮回转中心线相交,再将其绕x轴旋转σ度角,使得主销轴线位于xoz平面,接着将其绕y轴旋转τ度角,使得主销轴线与z轴重合,然后将A3绕z轴旋转θ度角,最后应用逆旋转变换和逆平移变换将主销轴线变换到原来位置,旋转的角度正负参考右手法则。
变换矩阵为:
T=T1·T2·T3·T4·T5·T6·T7
(13)
设A4点坐标为(xA4,yA4,zA4),用四维齐次坐标PA4=[xA4yA4zA41]表示三维空间的A4点,用四维齐次坐标PA3=[xA3yA3zA31]表示三维空间的A3点,由图形变换法可知:
PA4=PA3·T,
(14)
即可得A4点坐标为(xA4,yA4,zA4)。由于采用矩阵变换的方法,模型得到的解析解较为冗长,本文暂不列出。
A3点与A4点的z轴坐标之差即为车轮中心抬高量h1,即:
h1=zA4-rcosγ。
(15)
由相对运动关系可知右前轮总的抬高量h为:
h=-h1。
(16)
假设车轮半径r=0.3 m,外倾角γ=1 °,前束角β=0.3 °,前轮轴摆臂lb=0.1 m,主销内倾角σ=9.5 °,主销后倾角τ=4 °,代入以上各式可得出车轮中心主销拖距对车身抬高量的影响,结果如图5所示。
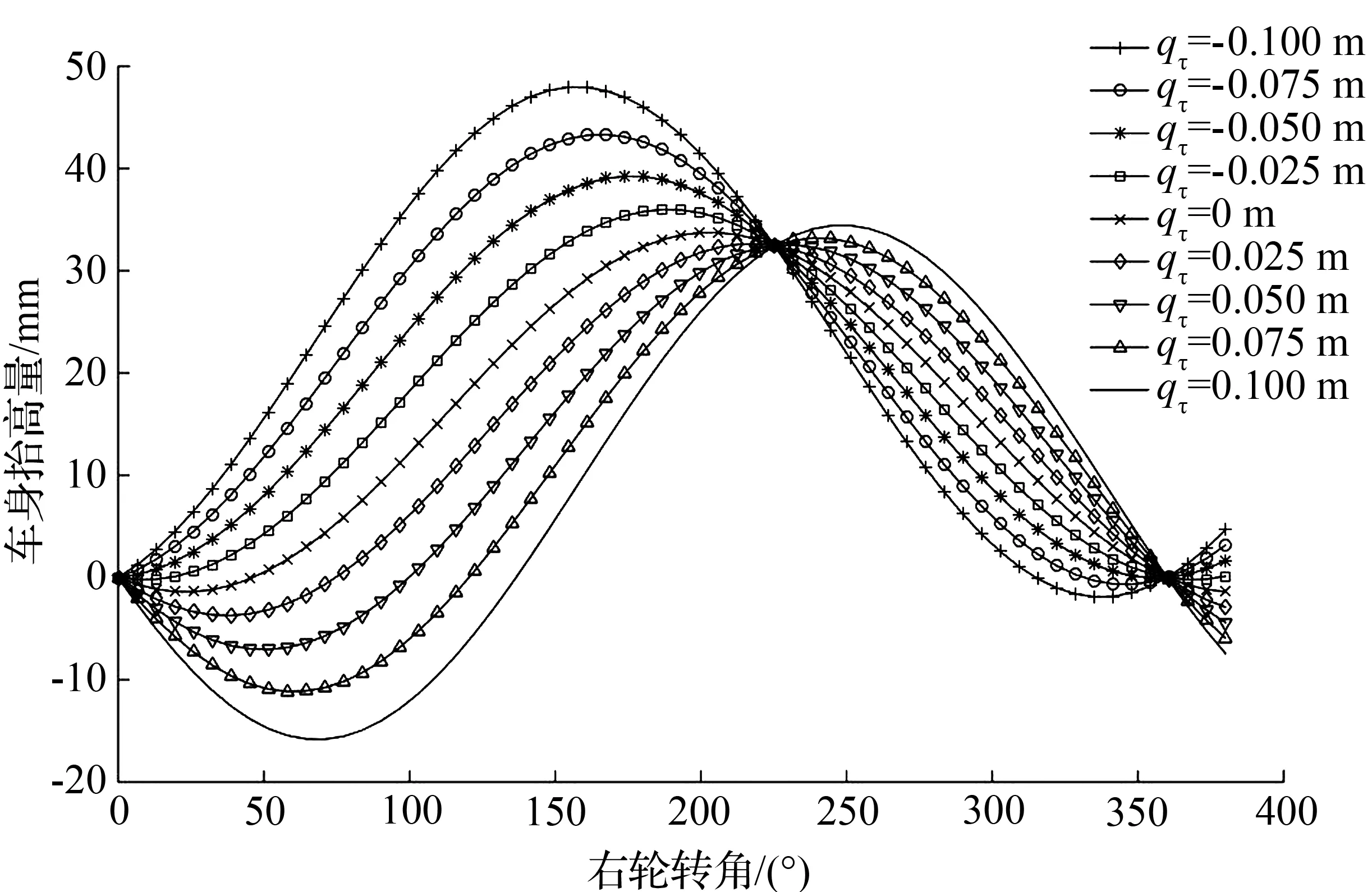
图5 车轮中心主销拖距对车身抬高量的影响Fig.5 Influence of castor offset at wheel centre on the body lift
由图5可知车轮中心主销拖距qτ对车身抬高量大小影响明显,如在qτ=0 m时,车身抬高量最大为33.75 mm,但是在qτ=-0.1 m时,车身抬高量最大可以达到47.97 mm。不仅如此,qτ的变化甚至影响车身抬高量的变化趋势,如在qτ=0 m,车轮转角在0 °~50 °范围内时,车身抬高量随着右轮转角的增加先减小后增大,但是在qτ=-0.1 m时,同样的转角范围,车身抬高量随着车辆转角的增加而一直增大。因为车身抬高量与回正力矩紧密相关,所以qτ也是一个影响车辆转向回正性能和转向轻便性的重要参数。
3 车身抬高量的全局敏感性分析
为分析多个输入参数对输出参数的影响程度,对车身抬高量进行全局敏感性分析。考虑模型的非线性特点,采用基于方差的敏感性分析方法,通常称为Sobol方法。Sobol法的核心思想是将模型输出的总方差分解为每个输入参数的方差和各输入参数相互作用的方差之和,然后通过输入参数对输出总方差的贡献比例进行敏感性分级。任意d个输入变量的数学模型可以写作为:
Y=f(X),
(17)
其中,X是关于输入参数{X1,X2,X3,…,Xd}的向量。
Sobol法假设输入参数在单元超立方体内是独立均匀分布的,即Xi∈[0,1],i=1,2,3,…,d。但是任何输入参数的定义区间都可以转换到[0,1]上,这一般不会造成误差损失。如果输入参数Xi的定义区间为[XL,XU],则有:
Xi′=Xi·(XU-XL)+XL,
(18)
Xi′表示Xi映射到定义区间[XL,XU]上的一点。
设置采样样本数为n(500或更多)[6],样本数量越多,结果越准确。输入变量数目为d(本文d=6)。Sobol法的一般处理流程[7]如下:
①生成一个n×2d的矩阵J。这里n个样本的采样应该根据输入参数的概率分布来完成。样本采样方法一般都是基于蒙特卡洛采样以及一系列基于蒙特卡洛采样的变种,这里采用Sobol’ quasi-random sequence来生成均匀分布的(准)随机数[6],借助Matlab中Sobolset函数实现,即:
(19)
②将矩阵J的前d列作为矩阵A,剩余的后d列作为矩阵B,这样给出d维单元超立方体的n个点的两个独立样本矩阵,即:
(20)
(21)
再构建n×d的矩阵ABi,使得ABi的第i列等同于矩阵B的第i列,其余列与矩阵A保持一致,即:
(22)
其中,i=1,2,3,…,d。
至此构建了A、B、ABi共(d+2)个矩阵,得到(d+2)×n组[0,1]区间上的输入参数样本。

(23)
(24)
总效应指数STi[9-10]为:
(25)
其中,对于Vxi(Ex~i(Y|Xi)),有[6]:
(26)
对于Ex~i(Vxi(Y|X~i)),有[11]:
(27)
V(Y)=V(f(A′B′)),
(28)
(29)
式(26)~(28)中,j=1,2,3,…,n;f(*)j表示取f(*)的第j行;X~i表示除了输入参数Xi外的所有输入参数;V(*)表示*的方差;Ex~i(*)表示包含所有输入参数但不包括Xi的*的期望值(本文采用均匀分布,也即*的平均值),同理,Exi(*)表示只包含输入参数Xi的*的期望期;Y|Xi表示输入参数Xi固定不变但接受X~i样本变化的输出参数Y,同理,Y|X~i表示除了输入参数Xi外的所有输入参数固定不变但接受Xi样本变化的输出参数Y。
在MATLAB中建立并运行上述数学模型,取样本数n=104,得到各输入参数对车轮抬高量的敏感性指标,结果如表1所示。
由表1可知,对车身抬高量影响较为明显的结构因素依次是车轮中心主销拖距、主销内倾角、主销后倾角,而其他因素对车身抬高量的贡献度则相对较低。虽然车轮中心主销拖距这一常被忽略掉的因素单独对车身抬高量的影响较小,一阶影响指数Si只有-0.001 7,但它与其他因素相互作用后对车身抬高量影响明显,总效应指数STi达到0.737 3,超过了主销内倾角和主销后倾角的总效应指数之和。因此,有时发现车轮定位参数匹配没有太大问题,但还是出现低速不回正或者低速回正过多现象,可能就因为没有考虑车轮中心主销拖距的影响。
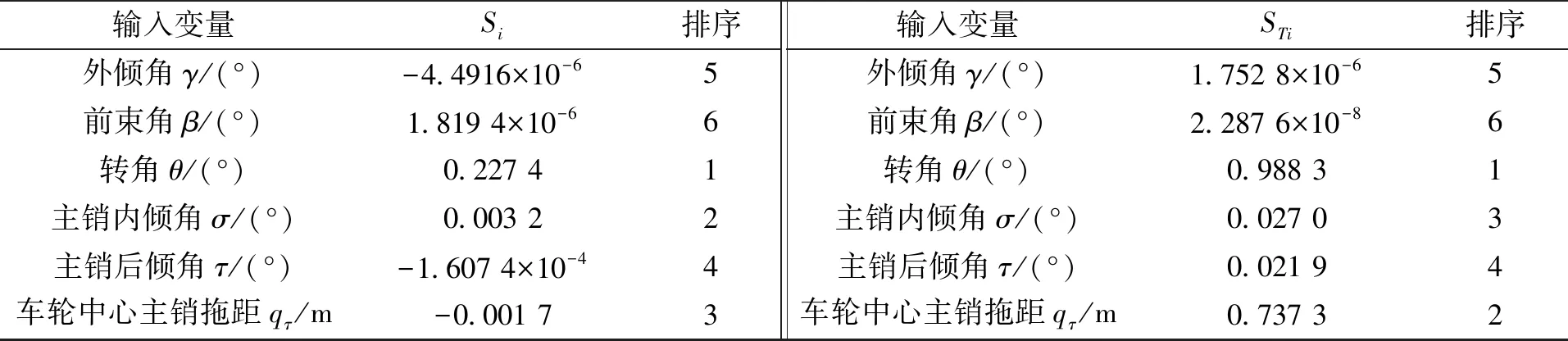
表1 各变量对车身抬高量的敏感性指标Tab.1 Sensitive index of each variable on the body lift
4 结语
本文基于图形变换法建立右前轮与主销相对位置的物理模型和车身抬高量的数学模型,通过理论分析得出车轮中心主销拖距与车身抬高量的关系,结果显示,车轮中心主销拖距不仅影响车身抬高量的大小,还影响着车身抬高量的变化趋势。应用改进的Sobol法对车身抬高量进行了全局敏感性分析,根据敏感性指标得出车轮中心主销拖距和主销内倾角、主销后倾角是对车身抬高量影响较大的3个因素。就所研究对象而言,车轮中心主销拖距对车身抬高量的贡献度甚至超过主销内倾角和主销后倾角对车身抬高量的贡献度,说明车轮中心主销拖距是一个对车辆转向回正性能和转向轻便性影响较为明显的参数。
本文在计算车身抬高量时采用一般性假设,将车轮视为刚性体,并未考虑其弹性变形,接下来的工作可结合轮胎模型进一步完善本文的车身抬高量模型。另外,本文在建立模型时假设车轮中心主销偏移距不变,未来可将其与车轮中心主销拖距结合进行共同分析,以进一步研究两者对回正力矩和操纵稳定性的影响。
