基于转矩优化分配的分布式电动车辆横摆力矩研究
2019-05-14李春明
王 悦, 李春明, 肖 磊
(中国北方车辆研究所,北京100072)
采用轮毂电机的分布式电驱动技术,是当前军用轮式车辆驱动技术领域的研究热点,也是未来轮式装甲车辆技术的重要发展方向.该类型的车辆采用轮毂电机直接驱动车轮,取消车内复杂的传动部件,能够节省底盘空间,避免机械损耗,提高传动效率;同时各轮转矩可以实现精确独立控制,响应精度和速度都得到提升,也为提高车辆的操纵稳定性提供了便利条件.
目前直接横摆力矩控制(Direct yaw moment control,DYC)是提高车辆操纵稳定性最有效的方法,传统车辆只能基于制动系统产生调节的附加横摆力矩,而分布式电动车辆由于其驱动力独立可控,更利于实现直接横摆力矩控制.DYC研究主要集中于控制算法设计和转矩分配两方面,即采用分层结构,上层根据运动状态与参考期望状态的偏差,通过控制算法得到维持车辆稳定行驶的驱动力和横摆力矩,下层将得到的转矩协调分配至各个车轮.常见的上层控制算法有:基于比例增益[1]的控制、PID控制[2]、滑模控制[3]和模糊规则[4]等,其中模糊控制不需要借助确切的数学模型,且适用于非线性系统,对于内部和外界变化的鲁棒性强.下层转矩分配主要分为基于规则[5-7]和基于目标优化函数[8-10]两种,基于规则的分配方法重点在于规则制定,实际应用中各轮的驱动力之间多存在比例关系,可以简化控制策略难度,减少计算量,更易于工程实现.但是此方法未能发挥出多轮驱动车辆每个车轮转矩独立精确可控的优势,且未考虑轮胎利用率、电机效率等其他方面的约束.而基于目标优化函数的分配方法,可从经济性、动力性方面考虑,根据实际侧重点设定优化函数,找到约束条件下的最优分配方法.目前基于目标优化函数的分配方法多以轮胎负荷率、滑移率最小为优化目标,实现对车辆状态的良好控制.
本研究以8个轮毂电机分布式驱动的军用轮式车辆为研究对象,设计了一种直接横摆力矩分层控制策略.上层的运动控制通过跟踪期望状态的横摆角速度和质心侧偏角,利用模糊控制得到维持车辆稳定行驶所需要的横摆力矩;下层的转矩分配控制器采用基于二次规划的最优控制分配方法,以轮胎负荷率最小为优化目标,对8个驱动电机的转矩进行分配.完成了基于TruckSim和Matlab/Simulink的联合仿真,在两种工况下分别与无控制状态和转矩平均分配策略进行对比所设计的控制策略.
1 DYC分层控制结构
如图1所示,控制结构分为上层车辆运动控制器和下层转矩分配控制器.

图1 控制器结构图
在上层控制中,根据实际车速和方向盘转角的输入,以车辆二自由度模型为参考模型,得出期望的横摆角速度ωd和质心侧偏角βd,同时车辆模型输出实际的横摆角速度ω和质心侧偏角β,模糊控制器根据横摆角速度实际值与期望值的偏差和质心侧偏角实际值与期望值的偏差,求出跟随参考状态稳定行驶所需要的附加横摆力矩.在下层中,按照指定规则或目标优化函数,将驱动转矩T1~T8分配至各个驱动轮.
2 车辆运动控制器设计
2.1 车辆参考模型
横摆角速度能够反映车辆在行驶过程中航向角的变化速度,与转向特性相关,侧重描述车辆的稳定性;质心侧偏角能够反映车辆在行驶过程中与预定轨迹的偏离程度,侧重描述车辆的轨迹保持问题.二者是反映车辆操纵稳定性的最优参数,因此选择线性二自由度模型作为参考模型.8×8轮式车辆为前两桥转向,简化后如图2所示[11].

图2 二自由度参考模型
根据牛顿第二定律和欧拉第二定律,横摆运动和侧向运动的动力学方程分别如下:

(1)
(2)
式中:Iz为横摆转动惯量;Fyi(i=1,2,3,4)为第i轴车轮的侧向力;δ1和δ2为前两轴车轮的转向角;Li(i=1,2,3,4)为质心到第i轴的距离;m为车辆质量;vx为纵向车速;vy为横向车速.
(3)
(4)
线性二自由度模型中,轮胎侧偏特性处于线性区域,轮胎侧向力Fyi和侧偏角αi呈现比例关系,Ci为第i轴的侧偏刚度,等于左右轮胎侧偏刚度之和,因此
Fyi=Ci·αi,
(5)
Ci=Ci1+Ci2.
(6)
由图2中几何关系可得,
(7)
其中一轴转角δ1和二轴转角δ2存在式(8)关系.
(8)
式中:Lij(i,j=1,2,3,4)为第i轴和第j轴之间的距离.
将式(5)~式(8)代入式(3)和式(4)中,前两桥转向四轴车辆二自由度模型的状态空间表达式为:

(9)
由于车辆在行驶过程中,侧向加速度会受到地面附着系数的限制,因此导出参考横摆角速度还应该满足式(10).
(10)
式中:μ为路面附着系数;g为重力加速度.
在车辆行驶中,希望质心侧偏角越小越好,因此参考值选为0[12].按照状态方程和附加约束在Simulink中搭建二自由度模型,即可根据纵向车速和第一轴转角的输入,得到期望横摆角速度和质心侧偏角.
2.2 模糊控制器设计
由式(9)可以看出,车辆的横摆角速度和质心侧偏角存在耦合关系,很难分别控制其跟随期望状态.通过对车辆稳定性的分析,制定以下控制策略:当质心侧偏角β较小时,仅控制横摆角速度跟随期望值;当质心侧偏角β增大到一定程度,但车辆此时未完全失稳,采用加权系数对横摆角速度和质心侧偏角进行联合控制;当质心侧偏角β过大,以控制质心侧偏角为主.最终输出横摆力矩如式(11)所示.
(11)

因此分别根据横摆角速度和质心侧偏角设计相应的模糊控制器,再根据当下质心侧偏角的大小按照式(11)求出输出力矩.


图3 Δω的隶属度函数

图4 Mω的隶属度函数


表1 横摆角速度ω模糊控制规则

表2 质心侧偏角β模糊控制规则
3 转矩分配控制器设计
3.1 平均分配
平均分配是基于规则的一种常用分配方法,使得8个车轮的纵向力对质心处产生的力矩大小相等.当车辆需要增大横摆力矩时,增大外侧车轮的驱动力,同时对内侧车轮施加同样大小的制动力;当车辆需要减小横摆力矩时,则增加内侧车轮驱动力,同时对后两轴外侧车轮施加相同大小的制动力.
以车辆前进方向为正,侧向沿驾驶员左侧方向为正,横摆力矩在车辆上方视角逆时针为正为例,当M>0时,力矩分配规则如下:
(12)
TL1=TL2=TL3=TL4,TR1=TR2=TR3=TR4.
(13)
式中:TLi和TRi(i=1,2,3,4)分别为左右侧车轮第i轴的转矩;Tx为速度跟踪模型得到的总纵向驱动力矩;M为上层制定的附加横摆力矩.
3.2 优化分配
基于规则的分配方法可以降低系统的复杂程度,但是牺牲了多轮驱动车辆执行器独立可控的优势.将转矩分配问题转化为约束条件下的优化问题,采用基于二次规划的最优分配方法可以改善这一缺点.
车辆总的纵向力矩:
Tx=TL1+TR1+TL2+TR2+TL3+TR3+TL4+TR4.
(14)
当前轮转角较小时,可以忽略侧向力的影响,车辆的横摆力矩如下:

(15)
将转矩分配问题改写成式(16).
v=B·u.
(16)
式中:v为目标控制力矩;u为每个轮胎的输出转矩;B为相关系数.
(17)

(18)
(19)
车辆失稳在大部分情况下是由于轮胎侧向力饱和造成的.根据轮胎纵向力和侧向力的耦合关系可知,当轮胎的纵向力越小时,侧向力的裕度越大.因此引入轮胎负荷率的概念,即纵向力与最大附着力之比,以8个车轮的轮胎负荷率最小为优化目标.目标函数如下:
(20)
车轮转矩受到电机最大转矩的限制,即
|Ti|≤Tmax
(21)
同时也受到路面最大附着力的限制,即
|Ti|≤μFziR
(22)
将目标函数和约束条件进行整合,即
minJ=uTWu
(23)
(24)
约束如式(25)所示.
(25)
将约束转化为min‖Bu-v‖2,即转化为序列最小二乘规划问题.采用两步优化方法求解.
(26)

最后引入权重系数γ,变为加权最小二乘问题,采用有效集方法求解.在Matlab中可使用提供的WLS工具箱进行求解.
(27)
4 仿真分析
利用TruckSim和Matlab/Simulink进行联合仿真.在TruckSim中搭建车辆模型并改变动力系统设置,将传统汽车模型变为8轮分布式电动车辆模型,并设置仿真工况.在Simulink中搭建控制模型.部分参数如表3所示.

表3 仿真车辆部分关键参数
4.1 驾驶员在环仿真
在μ=1的高附着路面上,设置vx=80km/h,进行双移线仿真试验,将无控制、平均分配与优化分配3种工况进行对比,结果如图5所示.
从图5(a)中可以看出,使用了TruckSim的驾驶员模型在环仿真后,3种工况下均可以较好地跟随期望路径采用平均分配和优化分配的车辆相比于无控制状态在车速维持方面表现更好,且由于施加了模糊控制,对横摆角速度和质心侧偏角均起到了抑制作用.无控制状态下,横摆角速度偏差值最大可达2.38(°)/s;采用平均分配时,偏差最大为0.42(°)/s减少了82%;采用优化分配时,偏差最大仅为0.2(°)/s,相对平均分配减少了52%,同时8轮中的最大轮胎负荷率也从0.064减小至0.04,且整体轮胎负荷率更小,轮胎力的输出储备变大,稳定裕度增加.
如图6所示,平均分配中,单侧车轮转矩相同。使用优化分配后,第一轴至第四轴左右车轮最大转矩分别减小了11%、9%、10%、8%、36%、38%、33%、36%,后两轴转矩优化效果显著,且能够根据各轮的垂向载荷大小不同,区别分配转矩;垂向载荷更大的前两轴车轮可以提供更大的附着力,因此分配更大的转矩.

图5 车辆状态响应

图6 转矩响应
4.2 驾驶员开环仿真
在μ=0.4的低附着路面上,设置vx=50 km/h,进行方向盘转向角脉冲输入试验,如图7(a)所示,在给定时刻先给方向盘向左的角脉冲输入,再变为向右的角阶跃输入.将无控制、平均分配与优化分配3种工况进行对比,结果如图7所示.

图7 车辆状态响应
无控制车辆在角阶跃输入后会出现转向过度的现象,而平均分配和优化分配可以改善车辆的转向稳定性.平均分配下横摆角速度的最大偏差为2.7(°)/s,优化分配下为1.9(°)/s,减小30%.在第二段角阶跃过程中主要由右侧电机输出转矩,因此右侧轮胎负荷率相对较大.但是优化分配从整体上降低了轮胎负荷率.
如图8所示,在平均分配中,同侧车轮输出相等大小的转矩,峰值转矩可达1 274 N·m,后期维持车辆平稳转向的稳态转矩平均为630 N·m和-320 N·m;采用优化分配后,峰值转矩降至1 125 N·m,下降12%,稳态转矩平均至少减少25%.
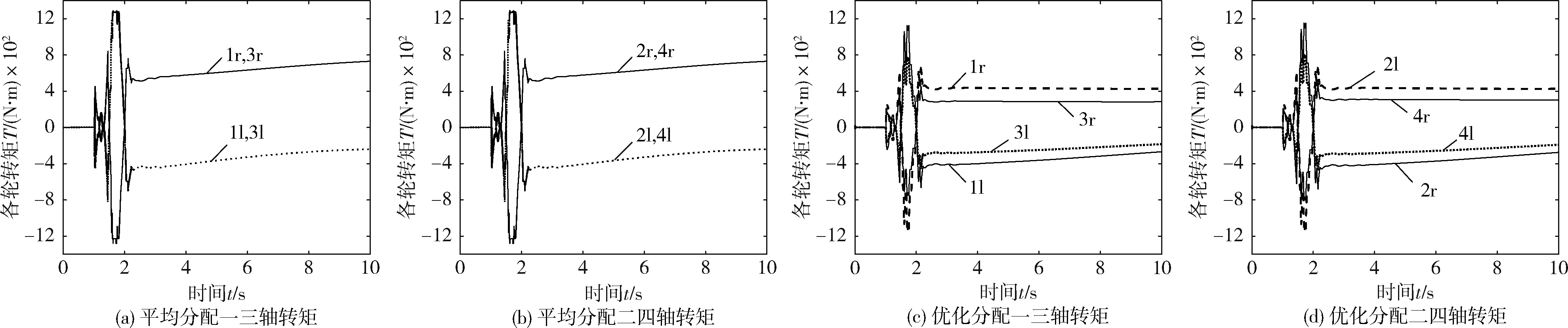
图8 转矩响应
5 结 论
针对驱动电机分布式8×8电驱动车辆的横摆稳定性,设计了分层控制系统,并分别在驾驶员开环、在环工况下进行仿真,得到以下结论:
1)联合控制横摆角速度和质心侧偏角的模糊控制方法,能有效提高车辆在高、低附着路面上的操纵稳定性,产生维持车辆稳定行使的附加横摆力矩;相比于无控制状态,横摆角速度最大偏差可减小50%以上,质心侧偏角可减少30%.
2)相较于基于规则的平均分配方法,转矩优化分配策略考虑了电机和路面的限制,弥补了前者的不足.且基于轮胎负荷率最小的优化目标,使分配结果更加合理,跟随期望状态的能力更强.
