无人机遥感在塑料大棚识别中的方法研究
2019-05-10范熙伟刘耀辉
周 洁,范熙伟,刘耀辉
(1. 云南师范大学旅游与地理科学学院,昆明 650500;2. 中国地震局地质研究所,北京100029;3. 昆士兰大学地球与环境科学系,布里斯班 4067)
0 引言
塑料大棚俗称冷棚,是一种新兴的保护地栽培设施。由于其具有建造容易、使用方便、降低气候环境的限制、提高单位面积产量等优点[1-3],被世界各国普遍使用推广,近年来以每年20%速度持续增长[4]。但同时,塑料大棚改变了地表的能量平衡和水循环模式,对局地气候、水文循环乃至全球气候变化与生态系统产生影响;废弃的塑料薄膜破坏了生态环境,使得土壤质量下降[5-6]。因此,快速准确地获得塑料大棚覆盖面积、位置分布等地理信息,对农业规划、环境资源保护等方面具有积极意义[7]。
传统的塑料大棚覆盖面积信息获取以人工实地测定为主,该方法需要耗费大量的人力、物力和时间,且无法获得准确的地理位置分布信息,因此无法满足海量数据实际生产需求。
近年来,随着航空、航天遥感技术的迅猛发展,不同平台、不同传感器、不同分辨率的遥感影像数据不断满足不同领域的应用需求[8]。国内外许多学者将遥感技术应用于塑料大棚检测提取研究,作了大量相关工作。根据所使用的遥感影像数据类型的不同,可将研究工作分为两种:基于中低分辨率遥感影像大棚检测提取研究[9-13]和基于高分辨率遥感影像大棚检测提取研究[14-17]。中低分辨率遥感影像具有幅宽大、价格低廉甚至免费等优点,适用于大范围、大面积的塑料大棚检测,但存在空间分辨率较低、重访时间长等缺点,不适合小区域塑料大棚面积的精确提取。高分辨率遥感影像数据可以更清楚地表达地物目标的空间结构特征及表面纹理信息,分辨内部更精细的地物组成、地物边缘等信息[18-19],但也存在数据价格昂贵等弊端。
无人机遥感技术的出现和发展,为这一问题的解决提供了新思路[20]。相比传统的卫星遥感和载人飞机,无人机遥感具有经济便捷、机动灵活、操作简便、实时性强、影像分辨率高等一系列优点。无人机影像经过几何校正和拼接后得到的正射影像具有很高的空间位置精度,可以实现对某一重点研究区域遥感影像超高时间、空间分辨率的快速获取,能迅速且准确地完成对研究区塑料大棚的检测提取[7,21-22]。
文章利用无人机高分辨率遥感数据,以云南省昆明市呈贡区可乐村某塑料大棚区为研究区域,分别采用基于像元法和面向对象法,对研究区进行分割、分类、面积提取,结合研究区背景资料和实地调研结果,对比分析了两种方法的精度。
1 研究区概况及实验数据
1.1 研究区域概况
该文研究区为云南省昆明市呈贡区斗南镇可乐村。该村地处昆明市呈贡区西部,距昆明市区12 km。海拔1 900~2 000 m,地处亚热带季风气候区,年降雨量800~1 000 mm米,全年无霜期320 d,年日照量2 311 h,土地肥沃,气候适宜,交通便利,区位优势突出。该村主要以花卉、蔬菜种植为主,塑料大棚种植已成为当地农业经济发展的支柱
1.2 实验数据
1.2.1 数据获取
该研究于2018 年12 月21 日在可乐村塑料大棚区域使用小型旋翼无人机进行遥感图像的获取,无人机型号为深圳大疆创新科技有限公司的Phantom 3 Professional。此款无人机搭载了HD 高清相机,配有GPS 和GLONASS 双卫星导航系统。无人机自带的光学成像相机其镜头由9 组9 片玻璃镜片组成,包含两片非球面镜片,拍摄视场角为94°,其焦距为4 mm,最大光圈F 2.8,曝光时间为8 s 至1/8 000 s 可调。此外,相机感光元件的尺寸为0.001 58 mm,拍摄有效像素1 240 万,图像大小为4 000×3 000 像素,空间分辨率达0.2 m。其他相关性能参数见表1、表2。
表1 Phantom 3 Professional 飞行器参数Table 1 Key aircraft parameters of Phantom 3 Professional
表2 Phantom 3 Professional 相机参数Table 2 Key camera parameters of Phantom 3 Professional
无人机拍摄起始位置为24.875°N,104.237°E,海拔1 928.4 m。飞行高度距地面140 m,工作范围为700 m×700 m。作业起始时间为北京时间2018 年12 月21 日13 点42分,结束时间为13 点49 分。一架次共拍摄了130 张高清可见光真彩色遥感影像,每张相片图像大小为4 000×3 000 像素,所有相片总大小为607 MB。
1.2.2 数据拼接
研究中所采用的无人机影像后处理软件为EasyUAV 快拼软件。该款软件主要包括数字正射影像图(Digital Orthophoto Map,DOM)、数字表面模型(Digital Surface Model,DSM)、数字高程模型(Digital Elevation Model,DEM)、真实三维密集点云、真三维模型的生成几个模块。将无人机获取的遥感图像导入软件后建立工程文件,同时导入由上述公司提供的无人机相机检校文件,EasyUAV 即可自动完成研究区DOM、DSM 和DEM 的生成。
将无人机获取的130 张遥感影像进行拼接处理,得到的研究区DOM 图如图1 所示。其中,图像大小为1.949 1 万×1.865 2 万像素,文件大小为369 MB,空三中误差为0.55 916 象元,满足该研究影像的精度需求。

图1 研究区DOM 图Fig.1 The DOM image of the study area
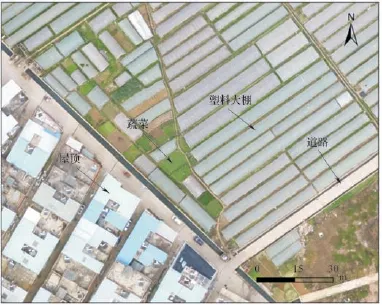
图2 大棚放大细节图Fig.2 The magnification of the greenhouse in detail
2 研究方法
2.1 基于像元法监督分类
监督分类(Supervised Classification),也称为训练分类法,是以建立统计识别函数为理论基础,根据典型样本训练方法实现地物分类的技术。要求训练区域具有典型性和代表性。判别准则若满足分类精度要求,则此准则成立;反之,需重新建立分类的决策规则,直至满足分类精度要求为止。
基于像元法监督分类的原理是基于影像的光谱特征来进行分类,基本单元是像元,不考虑地物的形状、纹理、上下文等相关特征,主要依靠像元的灰度值来进行地物的区分。
2.2 面向对象信息提取
面向对象信息提取主要包括两个关键性技术:影像分割和影像分类。eCognition 是当前应用最广泛的基于面向对象分类方法的遥感信息提取软件。
2.2.1 影像分割
面向对象的遥感分析是处理高分辨率影像的最佳途径之一,而影像分割是面向对象遥感分析的基础,分割结果决定后期特征识别与专题信息提取的精度。影像分割就是将图像划分为一个个大小不等、互不相交的小区域的过程,这些小区域具有相同的光谱特征和属性。影像分割算法包括点分割算法、边缘分割算法和区域分割算法,其中应用较为广泛的是区域分割算法中的多尺度分割方法,该算法采用自下而上的分割方式,首先将影像分割为像元大小的对象,根据对象的颜色和形状等特征将相邻相似的对象逐级合并,直到达到设定的分割尺度阈值,从而完成对影像的分割。其中最佳分割尺度的确定是多尺度分割算法中最关键的步骤,若分割尺度较小,影像中单个地物被分割成多个细小斑块,破坏了地物的完整性,增强了小目标的干扰作用,影像被“过分割”;若分割尺度过大,影像被分割成大对象,许多地物未与其周围环境区分割开,影像“欠分割”。“过分割”或者“欠分割”都不利于分割对象对地物的真实表达[23],进而影响到地物的提取精度。不同类型的数据、不同的分类任务需要在不同的尺度下进行分析,多尺度分割为方便的调整特定影像分析任务所需要的影像对象尺度提供了可能[24]。分割尺度以能最大程度适合该研究区地物类型的提取为最优,如图3 所示为最优分割尺度函数示意图。

图3 最优分割尺度示意图Fig.3 The image of optimal segmentation scale
多尺度分割算法中尺度参数的设置对分割结果有决定性的影响,对影像中地物异质性条件的不同,尺度参数设置需进行相应的调整,通常情况下,影像对象内部的异质性较小,地表相对均一时,该参数设置为较大值;反之,设置小值。所以多尺度分割算法的尺度参数值设置没有同一的标准,往往凭借实验经验设置,这也正是该算法的弊端。
多尺度分割算法中对影像的均质性采用Color(颜色)和Shape(形状)两个参数度量。颜色标准是对影像光谱(色彩)特征的度量,通过设置不同波段的权重值可以调节各个波段的比重;形状特征的度量又包括Smoothness(光滑度)和Compactness(紧致度)两个参数,其中光滑度指影像中对象边缘的光滑度,紧致度指影像对象之间的紧致程度。
2.2.2 影像分类
eCognition 中有隶属度和最邻近两种分类器。面向对象的最邻近方法是在传统的最邻近方法中将对象信息代替经典分类方法中的光谱信息进行分类[24]。此方法不仅利用影像的光谱信息,还充分考虑了地物的形状、纹理、上下文等空间信息,极大提高了分类精度。
2.3 精度评价
在遥感信息提取完成后,需要对提取结果进行精度评价,以判断提取结果的准确性和差异性。该研究在拼接后的DOM 图像上采集样本点,将实地调研与目视解译结合起来确定样本点类别,利用混淆矩阵来评价研究区各类地物提取精度。主要评价指标有:生产者精度、用户精度、总体精度和Kappa 系数。
生产者精度PPA,它是指某一类别的正确分类数Xii占参考数据中该类别像元总数(Xi)的比例。计算公式为:

用户精度PUA,它是指某一类别的正确分类数Xii占分为该类别的像元总数(Xj)的比例。计算公式为:

总体精度POA,它是指总分类正确数占总抽样数N的比例,它反应分类结果总的正确程度。计算公式为:

Kappa 系数:所有真实参考的像素总数乘以混淆矩阵对角线的和,再减去某一类中真实参考像素数与该类中被分类像素总数之积之后,再除以像素总数的平方减去某一类中真实参考像素总数与该类中被分类像素总数之积对所有类别求和的结果[23]。它是测定两幅图之间吻合度和精度的一种指标,定义为:

式(4)中,N表示样本总数,k表示分类类别数,Xii表示被准确分类类别数,Xi+表示混淆矩阵中每一列的样本数,X+i表示每一行的样本数。
3 实验结果与分析
3.1 基于像元法监督分类
该研究的基于像元监督分类使用ENVI 5.1 软件,具体按照以下5 个步骤进行。
(1)类别定义
通过目视判读及野外实地调研结果,将待分类研究区分为4 种类型进行样本选择和图像分类工作:即塑料大棚、房屋、植被、道路。
(2)样本选择
为完成监督分类,需要在遥感图像处理软件中进行训练样本的选择。该研究选取ENVI 遥感图像处理平台,利用其中的ROI(Region Of Interest)工具进行训练样本的选择。按照上述提到的4 种类别,每种类别选择若干个典型区域作为样本。ENVI 中采用J-M 距离(Jeffries-Matusita distance),转换分离度(Transformed Divergence)参数表示,最为常用的是基于条件概率的J-M 距离[25]。其表达式为:

式子中的ωi和ωj为两种地物的分类类别。可分离度的数值在0~2 之间,数值越大,可分离度越高。计算结果为塑料大棚与房屋的可分性值为1.46~1.72,塑料大棚与道路的可分性值大于1.91,塑料大棚与植被的可分性值为2.00。因此除了目视解译,上述统计值也同时说明使用监督分类时,塑料大棚和房屋之间将存在一定程度的分类误差。
(3)分类器选择
一般根据待分类图像的复杂度和分类精度需求等确定选用哪一种分类器。监督分类器以经典统计算法或贝叶斯理论为基础,这类分类器主要有:平行六面体分类器、最小距离分类器、马氏距离分类器和最大似然分类器,这类分类器的普遍问题是对分类训练样本的要求高,通常要求特征样本空间服从正态分布,而实际应用中特征空间数据往往具有高维异构特征,很难满足这类分类器的需求;基于神经网络分类器包括神经网络分类器、卷积神经网络分类器,这类分类器以神经元结构为原型,属仿生算法,其中卷积神经网络分类器属深度学习分类器,是近年来兴起的面向大数据的处理算法,该算法在图像分类中要求大量训练样本对分类器进行迭代学习运算,因此在地学应用中面临样本需求量过大,分类算法训练成本高的问题;基于机器学习分类器包括支持向量机、模糊分类,这类分类器在遥感数据分类中应用较多,算法精度高、训练样本门槛低,但是运算效率低是其主要不足。考虑到该文分类采用的图像仅有红、绿、蓝3 个波段,且图像中的地物类别较为简易,该研究选择最大似然法进行图像分类。
(4)影像分类
使用ROI 提取的监督分类样本和最大似然法分类器,即可对EasyUAV 软件拼接输出的DOM 真彩色遥感图像进行分类,图4 为分类结果,其中塑料大棚用红色表示、道路用灰色表示、房屋用蓝色表示、植被用绿色表示。从监督分类结果图4 和图1 研究区DOM真彩色图像对比可以发现,道路、植被类型与真彩色图像的空间分布较为一致。但是,由于异物同谱的影响,部分以红色为代表的塑料大棚被错分到了房屋中,道路和植被之间也存在误分。同时,分类结果中存在严重的“椒盐现象”。
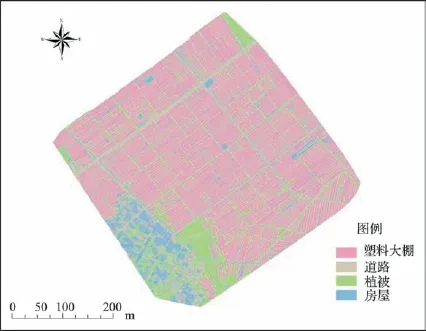
图4 基于像元分类结果Fig.4 The image of the supervised classification result
(5)精度评价
为评价监督分类方法提取房屋数据的精度,考虑到分类使用的无人机遥感图像空间分辨率优于5 cm,这里通过目视解译的方式,同时结合实地考察若干采样点的形式进行地表类型真值的提取。通过ROI 工具提取各种类别若干个采样样本后(尽量与分类样本有所区别,其中房屋类别中所有的房屋都进行提取),使用ENVI 中的混淆矩阵(Confusion Matrix)工具基于分类后图像和上述提取的ROI 真值进行分类结果的验证。
图4 可以看出,基于像元分类结果与无人机航拍DOM 图所呈现的大棚分布和走向几乎一致,可以清晰展示研究区的基本概况。但分类结果中存在明显的“椒盐现象”,也存在部分的错分、误分现象。
3.2 面向对象方法
3.2.1 面向对象分割
在进行图像分割时,考虑每个编辑层对分类结果的重要性和适宜性,给每个编辑层赋予不同的权重,这里每个编辑层的权重都赋为1,使红、绿、蓝3 个图层均同等重要地参与运算。再考虑不同类别地物的特征和分类要求,给图像设置一个分割的尺度参数。通过对比不同尺度下分割对象边界与地物实际边界的吻合程度来确定最优分割尺度,同时考虑到研究区地物相对单一,故将分割尺度设为较大值。
试验采用控制变量法。首先固定形状因子为0.1,紧致度因子为0.5,共设置5 个分割尺度,分别为200,500,750,1 000,2 000。试验影像在不同尺度下的分割效果如图5 所示。可以看出:当分割尺度为200 时,许多均质斑块被分割成几个对象而过于破碎,属于过分割;当分割尺度为500 时,分割得出的对象边界与地物的实际边界吻合较好;当分割尺度为750、1 000 时,部分塑料大棚未完全分割开;当分割尺度为2 000 时,得到的分割对象较大,单个对象中地物不均一。因此,确定最优分割尺度为500 时生成的对象大小较为理想。

图5 不同尺度下相同异质性因子分割结果对比Fig.5 The comparison of segmentation results of the same heterogeneity factors at different scales
除分割尺度外,还需设置形状因子(Shape)和紧致度(Compactness)因子以保证分割结果不会太破碎。图6 是在影像给定相同的分割尺度500 条件下,通过改变不同的形状因子和紧致度因子,最终选择最优的分割尺度参数。对比图像可以看:将形状因子设置过大,图像“欠分割”;将形状因子设置过小,图像“过分割”,过大或过小都不利于大棚的提取。当形状因子和紧致度因子均设置为0.5 时,对本影像中的大棚分割效果较好。因此,该文的最优分割尺度为500,形状因子0.5,紧致度因子0.5。具体细节信息如图6 所示。
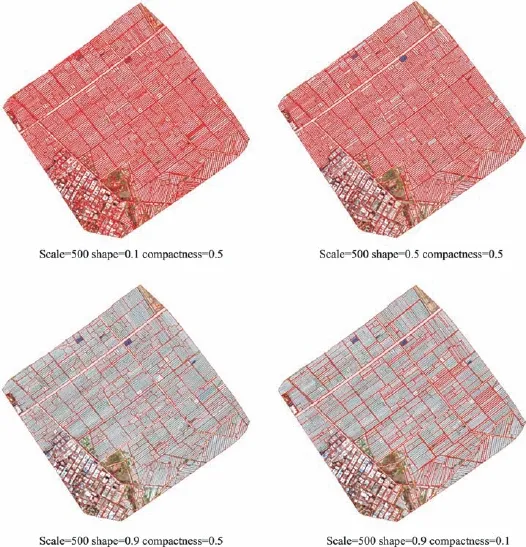
图6 相同尺度下不同异质性因子分割结果对比Fig.6 The Comparison of segmentation results of different heterogeneity factors at the same scale
面向对象多尺度分割将研究区地物分割成若干个二维的多边形。分割地物对象的几何特征提取就是基于地物对象矢量对象建立遥感图像的几何特征提取模型,提取影像的长宽比、形状指数、矩形拟合度等几何特征。
分割地物对象的长宽比计算公式为:

式(6)中,L指分割地物对象外接椭圆的长轴长度,W指分割地物对象外接椭圆短轴的长度。
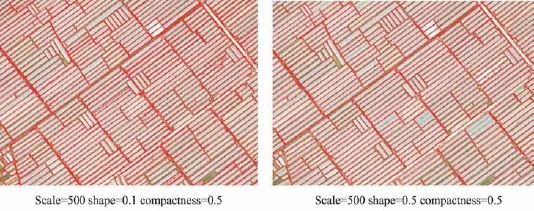
图7 两种分割结果细节放大对比(左图分割得过于破碎)Fig.7 The magnified comparison of the two segmentation results

其(7)中,la表示分割地物对象的周长,A 指分割地物对象的面积。
矩形拟合度描绘了一个分割地物对象与矩形的相似程度。此值通过计算一个与分割地物对象相等的矩形面积得到,矩形的长宽与分割地物对象的长宽相等。当一个分割地物对象与矩形完全一致时,拟合度为1,完全不相等时,其拟合度为0。分割地物对象的几何特征提取结果如图8 所示。
分割地物对象的形状指数的计算公式如下:

图8 分割地物对象的形状特征Fig.8 The shape features of object segmentation
3.2.2 面向对象分类
该研究采用监督分类方法,选用最邻近分类器对研究区进行分类。首先根据前面的研究成果,将研究区分为塑料大棚、房屋、植被、道路4 类;其次选择适当的样本,使用最近邻加权(Nearest Neighbor Configuration)工具配置最邻近特征,特征选择波段均值和标准差特征参与分类;最后,面向对象分类结果如图9 所示,其中大棚用红色表示、道路用灰色表示、房屋用蓝色表示、植被用绿色表示。
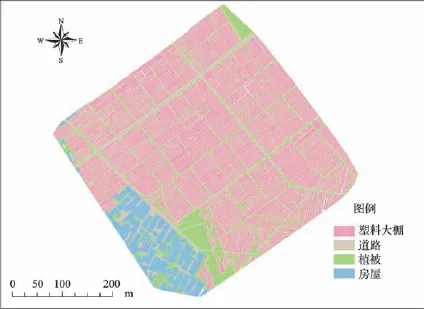
图9 面向对象分类结果图Fig.9 The image of the object oriented classification
图9 可以看出,面向对象分类结果与无人机航拍DOM 图所呈现的大棚分布和走向几乎一致,且无明显的“椒盐现象”,但也存在少量的错分、误分现象。
通过图10 可以看出,面向对象分割效果明显优于基于像元法。基于像元法分类结果中,错分、漏分现象较为频繁,且存在严重的“椒盐现象”;面向对象法有效地减少错分、漏分现象,抑制了“椒盐现象”,极大地提高了分类精度。

图10 两种分类结果细节放大对比图Fig.10 The magnified comparison of the two classification results
3.3 精度评价
为了对分类精度进行评价,该研究将研究区基本背景、实地调研结果与影像目视判读结合起来,选取了多个样本数据,并对这些样本数据与分类结果一致性进行比较。所选取的精度验证样本在研究区的分布如图11 所示,定量精度评价结果如表3、表4所示。
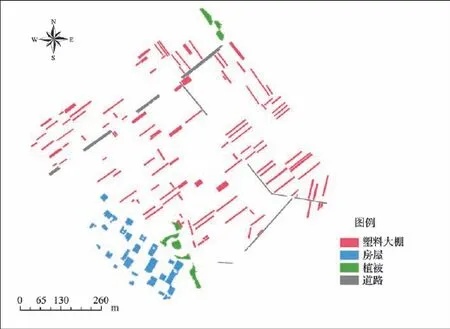
图11 精度验证样本分布图Fig.11 The samples distribution of accuracy verification

表3 分类结果精度对比Table 3 Comparison of the classification accuracy %

表4 分类结果精度评价Table 4 The evaluation of classification accuracy
从表4 可以看出,基于像元最大似然法分类结果的总体精度为68.3%,Kappa 系数为0.5848;面向对象最邻近分类法分类结果的总体精度为94.6%,Kappa 系数为0.9133。面向对象提取方法精度明显高于传统的基于像元提取方法。
根据前文分类结果图直观对比及上述定量精度评价分析认为,出现错分现象是由于地物之间光谱相似性造成。一方面,地物光谱相似性越高,出现错分现象就越严重,这是基于传统的像素分类方法对高分辨率遥感影像“同物异谱”、“同谱异物”现象难以克服的问题。另一方面,基于传统的像素分类方法所使用的是光谱亮度差异作为区分不同地物的分类标准,这将产生“椒盐现象”,即分类结果出现众多小斑点,这些都严重影响地物提取的精度。
面向对象方法不仅仅利用影像的光谱特征,还充分利用形状特征、纹理特征和上下文特征等细节信息,极大提高了高分辨率遥感影像的数据使用率,充分挖掘高分辨率遥感影像所包含的丰富地物信息,有效提高了分类精度。
3.4 地物信息提取分析
该研究采用面向对象方法提取各类地物的面积如表5 所示,其中:塑料大棚面积26.371 42 万 m2,房屋面积 4.123 67 万 m2,植被面积 11.073 49 万 m2,道路面积 3.178 88 万 m2,总面积44.747 46 万m2。

表5 面向对象提取面积统计Table 5 The statistics of object-oriented extraction areas 万m2
实地测量了13 个塑料大棚面积,将其作为样本数据,与面向对象方法提取的面积作对比,对提取面积的精度做验证,结果如表6 所示。
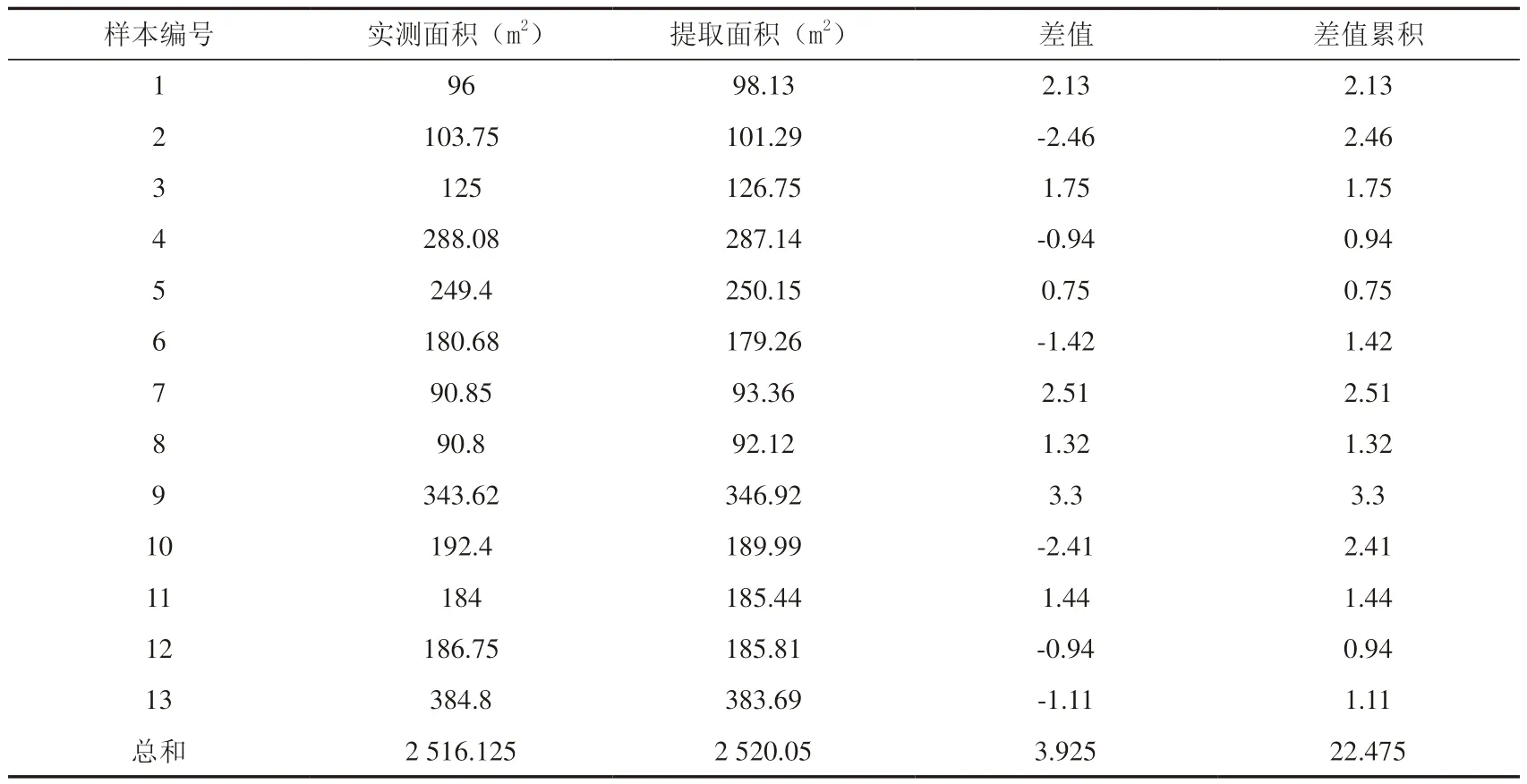
表6 实地面积与面向对象提取面积对比Table 6 Comparison of measurement and object extraction area
表6 的对比结果表明,面向对象方法提取的面积与实地测量提取面积相比仍然存在一定的误差,在总面积上的差值为3.925 m2,累积差值为22.475 m2。若按差值比例来计算,大棚的估计面积为(26.371 42 万±410.737)m2,满足精度要求。
4 结论
准确、高效的塑料大棚面积提取方法,是塑料大棚遥感估算的重要技术之一。研究利用无人机高分辨率遥感数据,分别采用基于像元法和面向对象法,进行塑料大棚识别提取方法研究探讨。通过试验对比分析得出以下结论。
(1)塑料大棚面积的基于像元提取总体精度为68.3%,面向对象提取总体精度为94.6%。面向对象提取方法精度明显高于传统的基于像元提取方法。
(2)与传统基于光谱特征像元的面积提取方法相比,面向对象分类方法充分考虑地物自身光谱、形状、纹理、结构等信息,有效地抑制了“椒盐现象”,极大降低了“同物异谱”、“同谱异物”的影响,提高了分类的精度。
随着高分辨率遥感技术的迅猛发展,影像分辨率越来越高,带来了更加丰富且复杂的地物信息,这使得面向对象分类方法比基于像元分类方法有更加广阔的应用空间。但面向对象分类方法的分割和分类的准确性主要取决于操作者的先验知识和经验,分类结果的精度也受到分割质量和分类规则有效区分的影响。如何实现快速、准确、自动化提取地物信息,是当前乃至今后的研究目标。
