基于退化模型的局部模糊复原问题研究
2019-05-08潘振雄耿显亚
潘振雄 耿显亚

【摘要】针对存在局部模糊的图像,通过高斯混合模型检测提取出模糊所在区域.在图像产生模糊的退化模型中,了解和整理各部分过程内容从而得出复原的理论可行解.实现复原过程中,选用L-R(Logistic Regression)算法迭代完成由模糊图像得到清晰图像的过程.
【关键词】高斯混合模型;退化模型;L-R算法
互联网联动社会高速发展的同时,人们愈加想要留住美好的瞬间.那些瞬间转瞬即逝,却由于成像环境或人为操作不当等原因致使图像产生模糊或是局部模糊.模糊的复原可以通过一些已经完成编程好的图像处理软件如Photoshop对图像在一定程度上做出恢复,但由于每一张图像产生模糊的原因千差万别,设定好的处理手段无法对图像的复原尽善尽美,通过对产生模糊图像的退化模型分析并通过寻找恰当的函数编程恢复出更清晰的图像在时下具有重要意义.
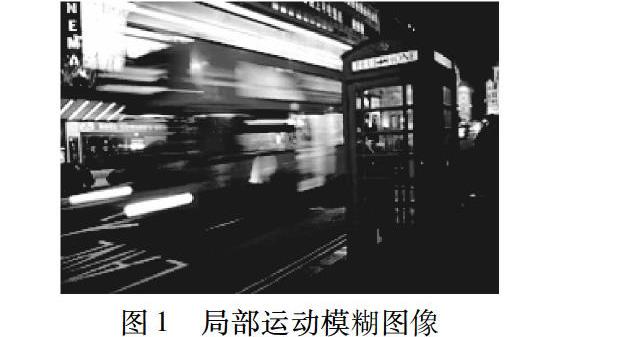
拍摄到的某一帧的画面中可能有局部是处于运动状态的.例如,下图中的伦敦公交车经过电话亭时拍摄的画面,图像景观中公交车相对拍摄者是运动的,因此,产生了拖尾现象的动态模糊.若要得到一张较清晰的图片则首先需要利用程序对模糊区域进行检测提取,在此提出了高斯混合模型对模糊区域进行检测;对模糊区域复原则需要根据产生模糊的模型进行分析,掌握其参数并依照一定算法进行运算;本文针对模糊图像退化模型和L-R算法实现模糊图像复原做出了一定的研究.
一、高斯混合模型检测模糊区域
当产生的运动模糊是局部模糊图像时,不同的图像位置上运动模糊核是会有所改变的.模糊核实质是一个与清晰图像进行卷积后导致图像变得模糊的一个矩阵.据此选用的高斯混合模型是单一高斯概率率密度函数的延伸,由于混合高斯模型下的贝叶斯模型效果优于单一高斯模型[1],故基于高斯混合模型(GaussianMixture Model,GMM)对运动模糊区域进行检测.
例如,有一批观察数据X={X1,X2,X3,…,Xn},数据个数为n,在d维空间中的分布不是椭球状,那么就不适合以一个单一的高密度函数来描述这些数据点的概率密度函数.此时我们采用一个变通方案,假设每个点均由一个单高斯分布生成,而这一批数据共由M个单高斯模型生成,具体某个数据Xi属于哪个单高斯模型未知,且每个单高斯模型在混合模型中占的比例未知,将所有来自不同分布的数据点混在一起,该分布称为高斯混合分布.即高斯混合模型数据可以看作是从数个高斯分布中生成出来的.
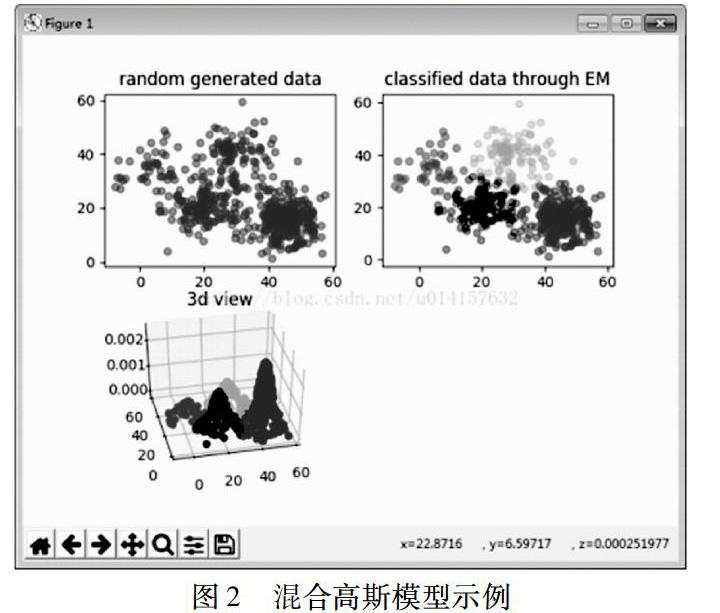
在混合高斯模型中,常用EM(Expectation Maximum)算法对GMM参数进行估计.对应到EM算法中,E步估计隐含变量,M步估计其他参数,交替将迭代极值推向最大.例如,以下随机从4个高斯模型中生成500个2维数据,根据数据进行了迭代计算并分类绘制三维视图.
二、模糊图像的退化模型
图像的质量变差叫作图像的退化或模糊[2].图像退化的典型表现为产生图像模糊、失真、有噪声等.从物理角度分析,运动而产生的模糊图像实质上是同一物体经过距离延迟后叠加的效果,并以图像的形式生成.图像的退化模型可以由下图展示:
图中的f(x,y),h(x,y),g(x,y)分别表示观察到的原始图像,退化系统的PSF模型,模糊图像;n(x,y)为加性噪声.若假设退化系统为线性不变系统,则可进一步用以下公式表示该退化过程[3]:
g(x,y)=f(x,y)*h(x,y)+n(x,y).
该式表示一个线性位移不变的图像退化模型.
式中:“*”表示卷积;h(x,y)表示窗函数.
依照该公式,在已得到给出的退化模型的模糊图像时,可以根据退化模型逆向逐一递推完成复原过程得到原始图像,即清晰图像.
三、L-R算法迭代复原图像
L-R(Logistic Regression)算法由极大似然估计衍生而出,最终收敛于泊松统计的最大似然解.这种算法和以往的基于傅立叶变换的图像复原算法不同,它假定观察图像、点扩展函数和原始图像服从某个概率统计模型[5],根据贝叶斯理论,通过迭代复原出原图像.其公式如下:
p(f|g)=p(g|f)p(f)p(g).
式中:p(f|g)表示原始图像的估计;p(g|f)表示点扩散函数(PSF);p(f)表示原始图像;p(g)表示退化图像,并在已知点扩散函数的情况下[6],假定像素元相互独立,有:
J(f)=lnp(g|f)=∑(x,y){g(x,y)ln[(h*f)(x,y)]-(h*f)(x,y)-ln(g(x,y)!)}
再由上式可推导出基于梯度乘性迭代算法下,图像的第n+1次迭代估计值为:
fn+1(x,y)=g(x,y)hn+1(x,y)*fn(x,y)*hn(-x,-y)fn(x,y).
正如大多数非线性方法一样,关于L-R算法迭代次数需要根据实验结果进行调整得到最优方案.
Matlab中,L-R算法是由名为deconvlucy的函数完成的,该函数语法为:
f=deconvlucy(g,PSF,NUMIT,DAMPAR,WEIGHT).
其中,f代表复原的图像,g代表退化的图像,PSF是点扩散函数,NUMIT为迭代的次数,DAMPAR是指定了结果图像和原始图像的偏离阈值标量,当像素偏离原值DAMPAR范围内就不再迭代,既抑制了噪声,又保留了图像细节(默认为0).WEIGHT是大小与g相同的数组,它为每个像素赋以权重反映图像质量.例如,从某个有缺陷的成像数组中得到不良像素都会被赋值为零,从而排出不良像素的影响;另一个作用根据平坦区域修正总量来调节像素权重.
四、总 结
本文建立在图像产生模糊的退化模型基础上,已有模糊图像的前提下分析了复原的可行性及操作模型步骤.基于退化模型的模糊图像复原可以实现二维平面内不存在透视的模糊图像的复原过程,尚未涉及三维空间内运动模糊和部分透视图像的复原.
【参考文献】
[1]牟加俊.一种理论可分的单幅图像模糊区域检测方法[D].天津:天津大学,2014.
[2]周籮鱼.基于盲解卷积的图像盲复原技术研究[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2013.
[3]He L,He D J,Cao M X.Objective Bayesian Analysis of Degradation Model with Respect to a Wiener Process[J].Journal of Systems Science & Complexity,2016(6):1737-1751.
[4]陈云龙,王平,王鹏.基于L-R非线性迭代的降质图像复原算法[J].计算机工程,2010,36(4):202-204.
[5]邹谋炎.反卷积和信号复原[M].北京:国防工业出版社,2001.