基于低频学习的电液位置伺服系统鲁棒自适应控制
2019-05-08刘雷姚建勇马大为王广文
刘雷, 姚建勇, 马大为, 王广文
(南京理工大学 机械工程学院, 江苏 南京 210094)
0 引言
电液位置伺服系统具有抗负载刚性大、响应快及功率密度大等突出优点,在国防和很多重要民用工业领域[1-2]都得到了广泛应用。同时电液位置伺服系统也是一个典型多因素影响的强不确定非线性系统[3-4],包含许多非线性特性和模型不确定性[5],其中模型不确定性又可分为参数不确定性[6]和不确定性非线性[7]两类。近年来,随着电液位置伺服系统向高精度、高频响的方向发展,对系统跟踪性能的要求越来越高,电液位置伺服系统中固有的非线性特性和各种不确定性因素,尤其是系统存在高频干扰和传感器测量噪声,使得传统的线性控制策略难以满足系统的高性能要求,迫切需要先进的非线性控制策略。
为了获得高性能的跟踪效果,各种非线性控制方法相继被提出。针对系统存在的非线性特性,反馈线性化控制策略被引入,通过在控制器设计中对非线性项进行前馈补偿以使误差动态线性化。由于自适应控制技术处理参数不确定性问题的优越性,考虑到系统的不确定性,许多学者提出了各种自适应控制器,如基于反演设计[8]的非线性自适应控制、自适应反馈线性化技术、自适应鲁棒、期望补偿[9]以及基于干扰观测器的控制[10]等。这些控制器不仅很好地解决了不确定性系统的控制问题,而且相比于线性控制器有更好的控制性能。实际系统的机械柔度、高压流体的流态等均表现为高频干扰,加之传感器本身的精度,难以保证准确地测量物理量,系统很难取得满意的跟踪性能。为了保证系统的跟踪误差,通常会增大自适应律增益,但这在实际运用中很可能激发高频颤振,进而引发系统的不稳定,甚至发散[11]。Yucelen等[12-13]提出了基于参考模型的低频学习自适应控制理论,在系统不发生高频颤振的情况下,通过提高增益达到快速自适应的目的,并通过仿真验证了这种低频学习方法[14-15]的有效性。
基于以上分析,本文针对电液位置伺服系统存在的高频干扰和传感器测量噪声导致传统自适应控制参数收敛性差、性能一致性低等问题,提出一种基于低频学习的鲁棒自适应控制策略。通过在传统自适应律基础上引入基于低通滤波的修正项,以尽可能消除自适应律中的高频成分,调整修正增益,从而使得系统自适应参数稳定收敛,提高系统跟踪性能。
1 系统建模与问题描述
电液位置伺服系统如图1所示,其惯性负载动力学方程为

(1)

图1 电液位置伺服系统结构简图Fig.1 Structure diagram of electro-hydraulic position servo system
忽略外部泄露,液压缸左右两腔的压力动态方程为
(2)
式中:VL和VR分别为液压缸左右两腔的容积,VL=VL0+Ay,VR=VR0-Ay,VL0和VR0分别为液压缸两腔初始容积;βe为液压油的有效弹性模量;qL和qR分别为左右两腔的建模误差;Δq为内部泄露量,Δq=CtΔp,Ct为液压缸内泄露系数。
Qs和Qr与伺服阀的阀芯位移xv的关系为
(3)
式中:kq为流量增益;
(4)
由于实验使用的是高频响伺服阀,其阀芯位移与输入近似为比例环节,即xv=kiu,ki为位置常数,因此从(4)式可知,s(xv)=s(u),进而(3)式可以写为
(5)
式中:kt=kqki为总流量增益。

(6)
对于大多数应用场合,结构化和非结构化的不确定性程度是已知的,因此以下假设总是成立的。
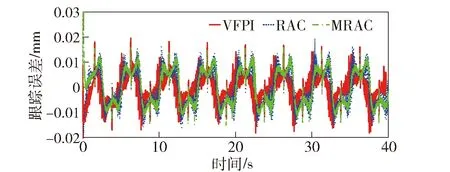
假设1电液位置伺服系统在正常工况下工作,两腔压力pL和pR需满足0 假设2期望位置指令3阶连续且可微。 假设2为基于模型的非线性控制基本假设,现实中不连续的测试信号(如阶跃信号等)可通过恰当的轨迹规划来满足此假设。 假设3系统参数集满足 θ∈Ωθ={θ:θmin≤θ≤θmax}, (7) 式中:θmin=[θ0min,θ1min,θ2min,θ3min]T、θmax=[θ0max,θ1max,θ2max,θ3max]T是已知的;Ωθ表示参数范围的集合。 假设4f(x,t)足够光滑且满足 |f(x,t)|≤d, (8) 式中:d为扰动的上界且为未知常数。 在设计之前,引入一个足够光滑的单调函数w(t)且满足: (9) 式中:μ、μ*为正常数。 (10) 式中:i=0,1,2,3;τi为自适应函数。令 (11) 式中:Γ为对角自适应矩阵,其具有以下属性: (12) 定义如下误差变量: (13) 结合(6)式和(13)式可得 (14) 基于(6)式,设计的实际控制输入和自适应函数τ分别为u=ua+us和τ=φz3, (15) 式中:ua为模型补偿项;us为鲁棒项;k3和ks均为正的反馈增益;为d的估计;w(t)>0为单调递减函数;φ=[1,x2,x3,ua]T为回归向量。 (16) 式中:Γf>0为参数自适应增益。 J(, (17) J(,f)为关于的负梯度,即修正项的结构: (18) 将(18)式代入(11)式,得 (19) 式中:σ>0为修正系数。 选取Lyapunov函数 (20) (21) 最后根据引理及运用杨氏不等式,将(16)式、(19)式代入(21)式,整理可得 (22) 对(21)式积分可得 (23) 为验证所提的控制策略,实验结果采用4种性能测量指标(最大值、平均值、标准差、归一化的控制输入变化量)来评价跟踪的性能,分别定义如下: 1) 跟踪误差的最大绝对值Me: (24) 式中:N为记录的数字信号数量。 2) 跟踪误差的平均值ε: (25) 3) 跟踪误差的标准差δ: (26) 4) 归一化的控制输入变化量Lc: (27) 式中:u(i)为控制输入;Δt为采样间隔。 实验平台如图2所示,液压缸系统参数见文献[16-18],(0)=[0 m2·Pa/(s·kg),-10 000 m·Pa/K,-40 N·s/(m·kg),210 m2·Pa/(s·V·kg)]T,θmax=[100 m2·Pa/(s·kg),1×106m·Pa/K,100 N·s/(m·kg),600 m2·Pa/(s·V·kg)]T,θmin=[-1.2×106m2·Pa/(s·kg),-1×108m·Pa/K,-1×107N·s/(m·kg),8 m2·Pa/(s·V·kg)]T,1(0)=0 m2·Pa/(s·kg). 其中,向量(0)中各元素代表参数θ的初始估计值,1(0)代表参数d1的初始估计值。考虑到实验台采用的是高精度传感器,一般工程应用中传感器的精度比较低,为了与实际状况具有可比性,不失一般性,以及验证所提出算法的有效性,采用数字模拟的形式在实验室传感器测得的物理量中加入高频噪声和高频干扰模拟信号,在所有测试工况中均选择幅值为1×10-5~1×10-4的虚拟随机高频白噪声信号,并将之加入实际系统位置测量中。 图2 电液位置伺服系统实验平台Fig.2 Experimental platform for electro-hydraulic position servo system 选取以下3种控制策略进行实验对比: 1)基于低频学习设计含有修正项的鲁棒自适应控制器(MRAC),具体形式为(15)式、(19)式; 2)电液位置伺服系统鲁棒自适应控制器(RAC),具体形式为(11)式、(15)式; 3)电液位置伺服系统速度前馈PI控制器(VFPI),具体形式为 (28) 式中:e1(t)=x1-xd为位置误差;kv=35.55 s·V/mm为系统速度常数;kP、kI分别为比例常数、积分常数。 选取期望指令信号xd=10arctan(sin(πt))·(1-e-t)/0.785 4 mm. 各控制策略参数取值如下: 1)MRAC参数:k1=1 800,k2=600,k3=105,ks=1,λ=0.01,Γ0=1 000 m·Pa/kg,Γ1=1.15×106s·Pa/kg,Γ2=2.65×104N·s2/kg,Γ3=5×10-4m·Pa/(V·kg),σ0=5×10-6s-1,σ1=1×10-8s-1,σ2=0.15 s-1,σ3=1×10-6s-1,Γf0=5 m·Pa/kg,Γf1=2 s·Pa/kg,Γf2=2 N·s2/kg,Γf3=0.5 m·Pa/(V·kg); 2)RAC参数:k1=1 800,k2=600,k3=105,ks=1,Γ0=1 000 m·Pa/kg,Γ1=1.15×106s·Pa/kg,Γ2=2.65×104N·s2/kg,Γ3=5×10-4m·Pa/(V·kg),λ=0.01; 3)VFPI参数:kP=8 000,kI=2 000. 图3 0.5 Hz工况下参数θ和d1估计Fig.3 θ and d1 estimations at 0.5 Hz 图3所示为参数自适应过程,从图3可以看出,相比于传统的RAC,带有修正项的MRAC可以滤除系统中的高频成分,使参数自适应的收敛更稳定,有效地防止了参数的漂移,同时在控制策略设计中补偿了此修正的影响,确保了系统的跟踪精度。图4所示为各控制器输入的变化情况,图5所示为各控制器作用下系统位置的跟踪误差对比,表1为最后两个跟踪周期的各项性能指标。由以上数据可知,本文所提出的MRAC控制效果在跟踪误差的最大值、平均值、标准差等方面均优于RAC和VFPI. 图4 0.5 Hz工况下控制输入对比图Fig.4 Comparison of control inputs at 0.5 Hz 图5 0.5 Hz工况下跟踪误差对比图Fig.5 Comparison of tracking errors at 0.5 Hz表1 0.5 Hz工况下性能指标表Tab.1 Performance indices at 0.5 Hz 控制策略Me/mmμ/mmδ/mmLc/mmVFPI0.06820.01950.01260.0106RAC0.04380.00870.00720.0099MRAC0.03590.00730.00570.0099 图6 0.5 Hz工况下MRAC压力曲线图Fig.6 Pressure signals of MRAC system at 0.5 Hz 系统参数取值同0.5 Hz工况,期望指令信号为xd=10arctan(sin(0.4πt))(1-e-t)/0.785 4 mm,0.2 Hz工况中各控制策略参数取值同0.5 Hz工况。 3种控制器作用下系统位置的跟踪误差如图7所示,其各项性能指标如表2所示。由于MRAC中的修正项可以滤除系统中的高频成分,频率越高干扰的频率也随之升高,此时这种控制器的作用越明显,可以看出MRAC的控制性能整体上优于其他两种控制器,且相比于上述两种工况,控制输入的颤抖恶化程度更小。由此可以看出MRAC的控制性能整体上优于其他两种控制器。 图7 0.2 Hz工况下跟踪误差对比图Fig.7 Comparison of tracking errors at 0.2 Hz 表2 0.2 Hz工况下性能指标表Tab.2 Performance indexes at 0.2 Hz 控制策略Me/mmμ/mmδ/mmLc/mmVFPI0.01830.00370.00290.3080RAC0.01950.00660.00270.2794MRAC0.01520.00660.00240.2739 本文根据液压缸非线性数学模型建立了状态方程,基于状态方程,经过一系列公式推导出了鲁棒自适应控制器;针对高频干扰和传感器测量噪声引起的传统自适应控制参数收敛性差、性能一致性低等问题,在鲁棒自适应控制器的基础上,提出一种基于低频学习的控制策略,并且基于Lyapunov稳定性理论证明了系统的全局稳定性;通过实验进行了验证。得出以下结论: 1)设计的修正项可以滤除自适应律中的高频成分,避免由此引起的高频颤振,有效降低了参数的高频波动,防止了自适应参数的漂移,同时控制输入的颤抖程度得到了有效的改善。 2)基于低频学习设计的鲁棒自适应控制器保留了渐进跟踪的性能,对比实验结果表明跟踪误差幅值也有较大程度的降低。 考虑到液压管路的动态、伺服阀自激谐振等因素会对电液位置伺服系统高频动态行为产生重要影响,后续将针对这些影响因素开展更深入的研究。
2 控制器的设计

3 新型参数自适应律的设计



4 稳定性证明


5 实验结果分析
5.1 实验参数及性能指标

5.2 0.5 Hz工况下的实验结果

图6为MRAC作用系统的压力曲线。



5.3 0.2 Hz工况下的实验结果

6 结论