国产尾标定位系统的研究及应用
2019-05-07王柏杨秦轲单瑞吴会胜王振杰曹凤海
王柏杨,秦轲,单瑞,吴会胜,王振杰,曹凤海
(1. 中国石油大学(华东) 地球科学与技术学院,山东 青岛 266580;2. 中国地质调查局青岛海洋地质研究所,山东 青岛 266071;3.东方地球物理公司,河北 涿州 070751)
0 引 言
目前,我国资源勘探的重心正逐步向海洋转移,用于海洋石油勘探的深海拖缆导航技术以及浅海海底电缆(OBC)正逐步推广[1-2].无论是深海拖缆或浅海OBC,国内多采用国外星站差分产品(OmniStar、StarFire和Veripos等)实现海平面高精度实时动态(RTK)定位,船载星站差分系统可测量和记录任意时刻高精度的位置信息,可提供约20 cm的水平精度和30 cm垂直精度. 随着人们对拖缆导航技术精度要求的逐步提高,提高海洋石油勘探拖缆技术中枪阵中心和电缆尾标的定位精度逐渐成为了一个重要的研究课题[3].随着RTK定位应用的拓展,尾标定位系统也随之快速发展. 其基本原理是利用基准站发来的差分信息及其位置信息,在尾标端实时解算流动站自身的坐标,实现尾标的实时高精度定位,然后再通过数据传输,由船基的主机接收来自副机的位置、高程和时间信息,实现该系统定位端的坐标高程及时间信息的实时获取[4].目前国内对尾标定位系统研究较少,王厚基[5-6]对尾标定位系统的工作原理及其定位精度进行了分析. 何水原[7]以Seamap公司的BUOYLINK EX尾标定位系统为研究对象对其在长排列地震调查中的应用进行了探讨. 高佩兰等[8]对相对全球定位系统(RGPS)的几种精度校检方法进行了探讨. 但国内鲜有学者对尾标定位系统的详细性能及核心设计进行分析.
尾标定位系统的核心是全球卫星导航系统(GNSS)动对动相对定位算法,是确定待定点接收机相对于基准站的相对位置的一种定位方式. GNSS动态相对定位是指待定点接收机处于运动状态的相对定位,即待定点的位置在不断变化,典型代表有普通RTK[9-10]和网络RTK[11-12]. GNSS定位中的流动站接收机和基准站都处于运动状态时,称为动对动定位模式. 该模式源于 Lu 等[13-14]于1994年进行的全球定位系统(GPS)载体姿态测量试验,许多学者之后对此模式进行了深入研究[15-18],引入动力学模型并对航天器编队飞行任务的实测数据进行了计算[19]. Hermann 等[20]研究了一般形式的GPS动对动定位,得到厘米级的定位结果. 国内喻国荣[21]深入研究了基于移动参考站的GPS动态相对定位算法. 虽然动对动定位技术已发展多年,但针对海洋石油勘探中的动对动导航定位研究较少.
本文在介绍基于GNSS动对动定位原理研发的尾标定位系统的设计流程后,对其在海洋拖缆中的应用过程及其定位精度进行分析并进行了陆上模拟测试. 测试结果表明自主研发的尾标定位系统能够达到厘米级的定位精度, 该系统核心GNSS板卡均为国产,打破了国外尾标定位系统设备对我国海洋石油勘探领域的技术垄断.
1 尾标定位系统的工作原理
1.1 GNSS动对动定位数学模型
GNSS 动对动定位本质上是相对定位,GNSS相对定位采用数据差分技术确定待定点相对于参考点的基线向量,在动对动定位里主要采用双差观测值,其伪距及载波相位双差观测方程为

(1)

(2)
通过伪距和载波相位双差观测方程解算基线浮点解并采用MLAMBDA算法固定模糊度回带,进而得到高精度的基线信息.
1.2 系统的软硬件组成及功能
尾标定位系统是一套针对海洋尾标高精度实时定位需求而研制的设备,由基准站部分与移动定位端的流动站两部分组成.基准站部分包括动态差分信号控制板及软件、基准站处理软件、基准站通讯模块及控制软件.基准站控制板外壳如图1所示.
基准站可与5台或5台以下流动站组成移动基准站定位系统,其主要功能包括:接收和解析外部定位数据,将可靠的定位结果传送给移动差分定位模块;接收多星座(GPS/GLONASS/BDS)GNSS卫星数据,根据RTK位置产生差分数据,并通过电台分时播发;接收和解析流动站回传数据;与上位机连接,将自身定位数据和流动站回传数据发送至上位机;通过串口为其它设备提供定位数据服务;文件传输协议(FTP)服务等.
基准站处理软件具有设备连接、定位数据记录、位置展示、定位数据质量监控、设备远程控制等功能.
流动站部分包括动态差分信号控制板及软件、流动站通讯模块及控制软件.其安装支架及外观如图2所示.
流动站是一套按设定参数全自动进行RTK定位和数据回传的设备,主要功能包括:接收多星座GNSS卫星数据;接收基准站播发的移动参考差分数据,进行高精度RTK定位解算;与上位机连接,将定位数据发送至上位机;FTP服务等.
1.3 系统的工作原理
尾标定位系统中的动态基准站架设于母船之上,移动定位端安装于尾标浮体之上,系统运行时两端同时接收卫星信号.基准站通过端口接收由星站差分获得的高精度位置数据,同时接收GNSS原始数据,进行数据同步后,可生成RTCM 3.X格式的差分数据,同时基准站能够与尾标移动定位端之间进行实时通讯,将差分数据播发至尾标接收机,尾标接收到差分数据,通过RTK解算方式获取实时差分位置,解算完成后,尾标各移动定位端将定位及状态等数据回传到基准站. 其间的数据传输均通过高效、低功率电台实现. 所得数据由基准站处理软件进行实时地监控与储存. 该系统的工作原理如图3所示.

图3 尾标定位系统工作原理图
2 尾标定位系统的设计及应用
在对尾标定位系统进行整体设计之后,详细介绍各部分的设计流程并以系统在海洋拖缆作业中的应用为例介绍尾标定位系统的基本应用流程.
2.1 尾标定位系统的设计
系统研制之前,需结合海洋石油勘探的实际特点,设计定位方案:在母船上放置一台动态基准站,移动定位端(拖缆尾标)放置两台GNSS流动站,与母船上的基准站进行实时差分作业,整体设计方式如图4所示.

图4 尾标定位系统整体设计图
系统设计主要包括基准站设计与流动站设计两大部分.
2.1.1 基准站设计
基准站主要包括:动态差分信号控制板及控制软件、基准站处理软件、基准站通讯模块及控制软件等部分.
1)动态差分信号控制板及控制软件
动态差分信号控制板由两块板卡组成:GNSS差分板和控制底板,本系统选用国产高精度GNSS板卡,为保证动态基准站参考位置的精度,提供精确位置的接收机和GNSS差分板共用一个GNSS天线. 自行设计控制底板并编写嵌入式控制软件.
控制软件实时缓存GNSS板卡获取的卫星原始观测数据,通过端口得到高精度坐标和时间戳后,根据时间戳与原始观测数据进行时间对齐,按照标准编码格式生成差分数据,并将此差分数据通过通讯链路发送至周围流动站接收机群,流动站接收机群接收到差分数据后实时获取高精度定位坐标并评估定位质量.
2)基准站处理软件
基准站处理软件基于Windows操作系统设计,主要负责对移动基准站进行参数设置、设备连接、定位数据接收与记录、位置展示、定位数据质量监控、设备远程控制等工作.
3)基准站通讯模块及控制软件
基准站电台通讯模块选用为定位数据传输专门设计的高性能数据链,发射功率选择2 W,保证海上无干扰情况下传输距离大于2 km,通过设置使基准站通讯单模块利用时分多址方式进行作业,以便在单一电台模块故障情况下能保障临时工作.
控制软件基于Linux进行嵌入式设计,负责数据的发送、时分多址定时、数据接收与处理、指令发送、接收和解析与执行等工作.
动态基准站数据接收及处理过程如图5所示.
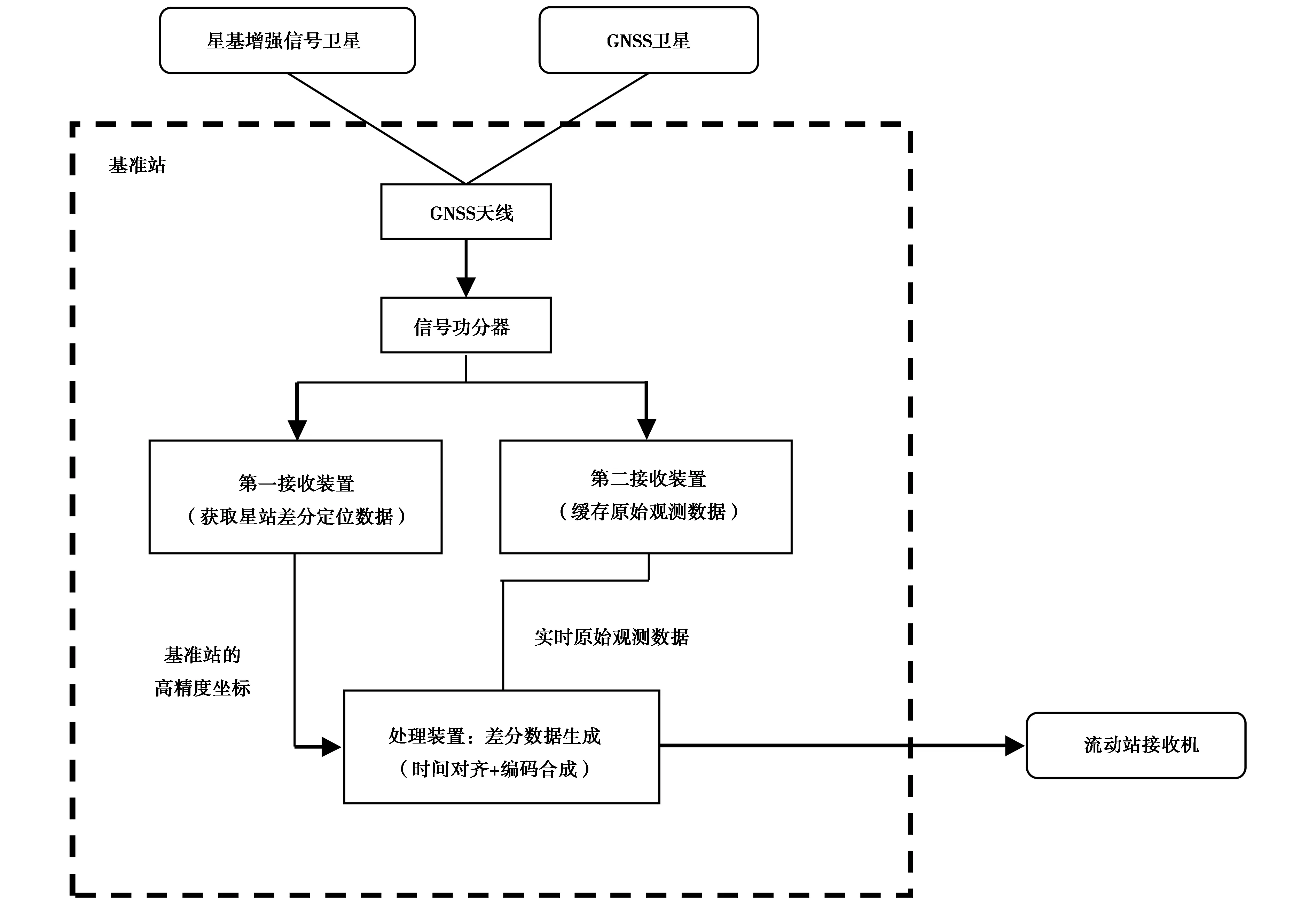
图5 动态基准站数据接收及处理流程图
2.1.2 流动站设计
流动站主要包括:动态差分信号控制板及软件、流动站通讯模块及控制软件.
1)动态差分信号控制板及软件
与基准站相似,动态差分信号控制板由GNSS差分板和控制底板两块板卡组成. GNSS板卡依然选用国产GNSS高精度板卡,自行设计控制底板并编写嵌入式控制软件.
控制软件能够完成电源和信号管理、参数设置、数据存储、指令接收与分发、电台数据分时控制和动态差分数据接收及处理、GNSS差分板数据接收和解析等工作. 控制软件可通过电台获取差分数据.
将完整的差分数据包传送给差分板,接收差分板定位成果数据并进行解析,提取有效定位结果和质量信息,进行本地存储并通过控制实时发送给母船.控制软件还需实时接收并执行本地(通过端口)或远程发送的指令,进行参数设置和数据上传、下载等.
2)流动站通讯模块及控制软件
流动站通讯模块类似于基准站通讯模块,采用时分多址方式进行作业. 控制软件负责数据的发送、时分多址定时、数据接收与处理、指令发送、接收和解析与执行等工作.
流动站尾标数据处理技术路线图如图6所示.

图6 流动站数据处理技术路线图
2.2 尾标定位系统在海洋拖缆作业中的应用
2.2.1 尾标定位系统的安装
首先将基准站处理软件安装至母船操作站并进行调试,安装调试完成后将GNSS天线与基准站高增益天线在远离金属无遮挡物的地方固定好,并通过GNSS馈线将两天线连接至基准站. 母船启航前在港口内进行连续开机测试,观察静止状态下设备和软件的工作状态,确保正常运行后将流动站安装于尾标浮体之上,安装完成后即可自动通电运行. 流动站架设如图7所示.

图7 流动站架设
2.2.2 尾标定位系统的运行
各设备安装完成并进行供电后,通过基准站处理软件执行设备连接命令,输入相应的接口参数即可连接成功,随后利用该软件进行数据监控. 母船到达施工海域后,将携带流动站的尾标浮体随拖缆放入海中,基准站在动态状况下接收外部高精度坐标并实时产生差分数据,通过电台进行播发,同时接收流动站回传数据并通过自主开发的基准站处理软件进行监控. 处理软件可获得相对位置等信息,输出并保存.RGPS格式的文件,这些数据最终将为综合导航系统所用.
3 实验测试与分析
为确保系统能够满足尾标高精度实时定位的需要,有必要在出厂前进行一系列测试.测试项目主要包括测试尾标定位系统所用电台模块的传输距离及稳定性、尾标定位系统的定位精度等.
3.1 尾标定位系统电台模块的传输距离及稳定性分析
3.1.1 电台传输距离及稳定性测试方案
架设一套RTK系统用来模拟星站差分系统,为尾标定位系统的基准站提供高精度的外部坐标,如图8所示.

图8 架设RTK系统
将流动站架设在轿车车顶,模拟尾标浮体的运动,如图9所示,基准站放置于SUV车上,模拟船舶的行驶,如图10所示. 在动态状况(40 km/h)下基准站接收外部高精度坐标,实时产生差分数据并通过电台进行播发,接收流动站回传数据并通过基准站处理软件进行监控,以不同行驶速度、不同加速度测试电台传输距离及稳定性.

图9 架设流动站

图10 架设基准站
3.1.2 电台传输距离及稳定性分析
经过测试,基准站设备连续运动状态下(40 km/h),电台在2 km距离范围内能够实现持续稳定地完成双向数据传输功能,其中最大的距离可达2 047 m. 2 km范围内的解状态如表1所示.极限测试结果表明在3.6 km距离处,基准站和流动站之间还可以实现数据通讯,同时流动站获得部分固定解,基准站获得返回的部分坐标成果如表2所示.

表2 极限条件下的解状态
由测试结果可知,在2 km范围内基准站能够获得连续稳定的固定解,所采用的电台模块传输距离及稳定性可以满足海上导航定位的需求.
3.2 尾标定位系统的定位精度分析
3.2.1 尾标定位系统的定位精度测试方案
将流动站架设在检定场检定位置上并进行连续坐标采集;在另一已知点上架设一套RTK系统,作为外部坐标提供源,为尾标流动站提供高精度的外部坐标;尾标定位系统的基准站跟随运动载体进行不规则的运动,同时播发差分数据,记录流动站回传的实时坐标. 对尾标定位系统的精度测试分两部分,第一部分测试为静态测试,尾标定位系统的基准站处于静止状态,对流动站数据进行长时间连续记录和采集;第二部分为动态测试,基准站无规律运动,对流动站数据进行长时间连续记录和采集.
3.2.2 尾标定位系统的定位精度分析
由于流动站所在检定位置的精确坐标已知,便于进行精度评价. 分别对静态测试与动态测试的结果进行精度统计,记录不同范围均方根值(RMS) 的历元数及占总历元百分比,如表3所示.

表3 精度统计表
通过表3可以看出,基准站静止时,平面位置精度在5 cm以内的历元数能够达到总历元的96.3%;在10 cm以内的能够达到99.5%.高程位置精度在5 cm以内的,能够达到93.2%;在10 cm以内的能够达到99.1%.
在基准站运动时,平面位置精度在5 cm以内的历元数,能够达到总历元的99.2%;在10 cm以内的,能够达到99.97%.高程位置精度在5 cm以内的,能够达到98.7%;在10 cm以内的能够达到99.8%.
由以上结果可以看出,该尾标定位系统能够基本实现厘米级别的相对定位精度,其定位效果可以满足实际生产中海上对于导航定位的需求.
4 结束语
本文针对自主研发的尾标定位系统详细阐述了设计流程并进行了性能分析. 测试结果表明自主研发的尾标定位系统数据传输稳定且能够达到厘米级的定位精度,流动站实时相对定位精度不大于0.1 m,其定位效果可满足实际生产中对于导航定位的需求. 对于尾标定位系统应用时的特殊情况,如气候条件恶劣或母船转弯时卫星信号出现中断、产生浮动解等,在保障定位精度的情况下,研究平滑算法,预计能达到更好的应用效果.
本文研发的基于动对动定位技术的尾标定位系统,其基准站发送的差分信号不仅限于应用于尾标定位系统流动站,还可应用于有效范围内所有的定位设备,均可达到厘米级的定位效果,可根据实际应用进行扩展. 由于此系统为国产设备,既能打破国外设备商的垄断,同时大大降低了初始投资成本,可提高后期维护效率,有广阔的应用前景.