农用车柔性底盘姿态切换参数对切换精度与时间的影响及其优化
2019-04-26李翊宁郭康权陈文强瞿济伟
李翊宁,郭康权,2※,陈文强,瞿济伟,高 华
农用车柔性底盘姿态切换参数对切换精度与时间的影响及其优化
李翊宁1,郭康权1,2※,陈文强3,瞿济伟1,高 华1
(1. 西北农林科技大学机械与电子工程学院,杨凌 712100;2. 陕西省农业装备工程技术研究中心,杨凌 712100;3. 第一越南苏联职业技术学院电子工程学院,福安市 15910)
为了研究农用车柔性底盘的姿态切换运行特性,该文进行了柔性底盘姿态切换分析和基于二代样机在硬化路面上的姿态切换试验,建立了姿态切换状态模型,并通过层次分析法和遗传算法优化了切换参数,研究了不同平移角度、电机转速、切换角度、平移速度和回转速度条件下的切换精度和切换时间,得到各因素及其交互作用对农用车柔性底盘姿态切换的影响和不同切换参数的相互配合关系。结果表明:影响准备与恢复精度的主次因素为电机转速>平移角度,影响准备与恢复时间的主次因素为平移角度>电机转速;横行姿态的平移速度对其横行精度和时间都有极显著的影响,任意平移角度下,横行姿态的电机最优转速为5.4 r/min,最优平移速度为3.45 m/s;影响原地回转姿态的回转精度主次因素为:切换角度>回转速度;影响原地回转姿态的回转时间主次因素为:切换角度>回转速度>交互作用;任意平移角度下,原地回转姿态的最优电机转速为5.4 r/min,当切换角度为0~85°时,最优回转速度为(0.003 3β+0.506 8) rad/s,当切换角度大于等于85°时,最优回转速度为0.78 rad/s。优化参数对比结果表明:横行姿态中,优化参数组的试验结果在综合精度方面与精度优先组持平并高出时间优先组4.16%,在综合时间方面与时间优先组持平并少于精度优先组17 110 ms;原地回转姿态中,优化参数组的试验结果在综合精度方面与精度优先组持平并高出时间优先组5.15%,在综合时间方面分别少于时间优先组和精度优先组646和996 ms。优化后的姿态切换参数能够保证柔性底盘在略微损失姿态切换精度的情况下,以较快的姿态切换效率完成其姿态切换过程。
农业机械;车辆;柔性底盘;姿态切换;参数优化;层次分析法;遗传算法
0 引 言
中国设施农业对机械化与自动化要求迫切[1-3]。但是设施农业内的空间有限,传统农用车辆底盘不能很好地适应设施农业内部以及复杂的道路环境。为此,很多科研人员在四轮独立驱动与四轮独立转向农用车辆底盘方面进行了相关研究。张铁民等[4-5]研制了四轮独立驱动小车的电机驱动和四轮转向控制系统,实现了不同负载和路况下稳定的运行。张京等[6]设计了基于低速阿克曼四轮转向模型与PID控制算法的四轮独立转向驱动控制系统,分析并验证了四轮独立转向驱动控制策略的有效性。Ko等[7]研制了用于温室农业喷洒作业的移动机器人平台,并从系统集成的角度研究了该机器人的自主驾驶策略。Oksanen等[8]对4WS遥控拖拉机的转向结构与过程进行了建模,并针对四轮转向提出了一种非线性补偿控制 设计。
但是,以上各研究在完成了基本的车辆底盘研制与测试后,都把随后的研究重点转向了基于GNSS或机械视觉等用于底盘导航方面的内容,并没有深入挖掘四轮独立驱动与四轮独立转向技术对农用车辆底盘在转向与角度转换等方面的运行特点及其适用性,未能体现出此类新型底盘系统相对于传统农用车辆底盘的优越性。
同时,本项目组在柔性底盘一代样机及其试验平台的基础上,进行了柔性底盘运动与动力学特性的测定[9-11],并完成了柔性底盘驱动与转向协同控制特性试验[12],对柔性底盘模式切换控制参数进行了相应优化[13]。但是,柔性底盘一代样机为理论原型机,其结构特点、功率载荷和控制系统等都不适用于实际道路情况。并且一代样机的测试与优化为试验台架上的理想环境,并不能完全反应底盘在实际运行过程中的特性。因此,项目组设计并研制了柔性底盘二代样机[14],并对其在硬化路面上的平移模式与姿态切换模式之间的非连续转换进行了相关研究。
本文主要探讨柔性底盘在姿态切换模式中,底盘各切换参数对不同的切换姿态在准备、保持与恢复3个阶段的优化问题。采用层次分析法确定各阶段试验指标的权重值,并通过遗传算法对姿态切换状态模型进行最优解的求解,得到底盘在姿态切换模式中各切换参数的最优配合关系,提高了柔性底盘在此运行过程中的稳定性和效率。
1 姿态切换模式分析
柔性底盘平移模式和姿态切换模式的转换过程如图1所示。柔性底盘的基本运行模式为平移模式。平移模式下,底盘直线运行方向与底盘坐标系的轴存在一个[0, 45°]的夹角,称之为平移角度(°)。此时底盘整机和4个单轮行走系之间的运动关系如式(1)所示。
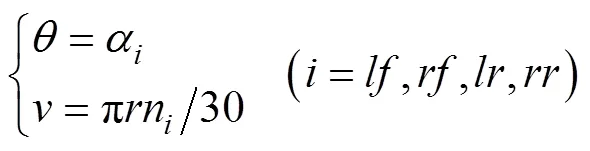
式中α为单轮行走系的偏置轴转角,(°);为柔性底盘的平移速度,m/s;为轮胎半径,m;n为单轮行走系的轮毂电机转速,r/min;下标、、和分别表示左前、右前、左后和右后单轮行走系。
柔性底盘的姿态切换模式总是从平移模式转换而来,并在姿态切换过程运行完成后,再次恢复为平移模式。柔性底盘的姿态切换模式分为横行姿态和原地回转姿态。2种切换姿态和平移模式之间的相互转换过程总体一致,分为准备阶段、保持阶段和恢复阶段。2种切换姿态在具体实现过程中存在差异,需要进一步分析。
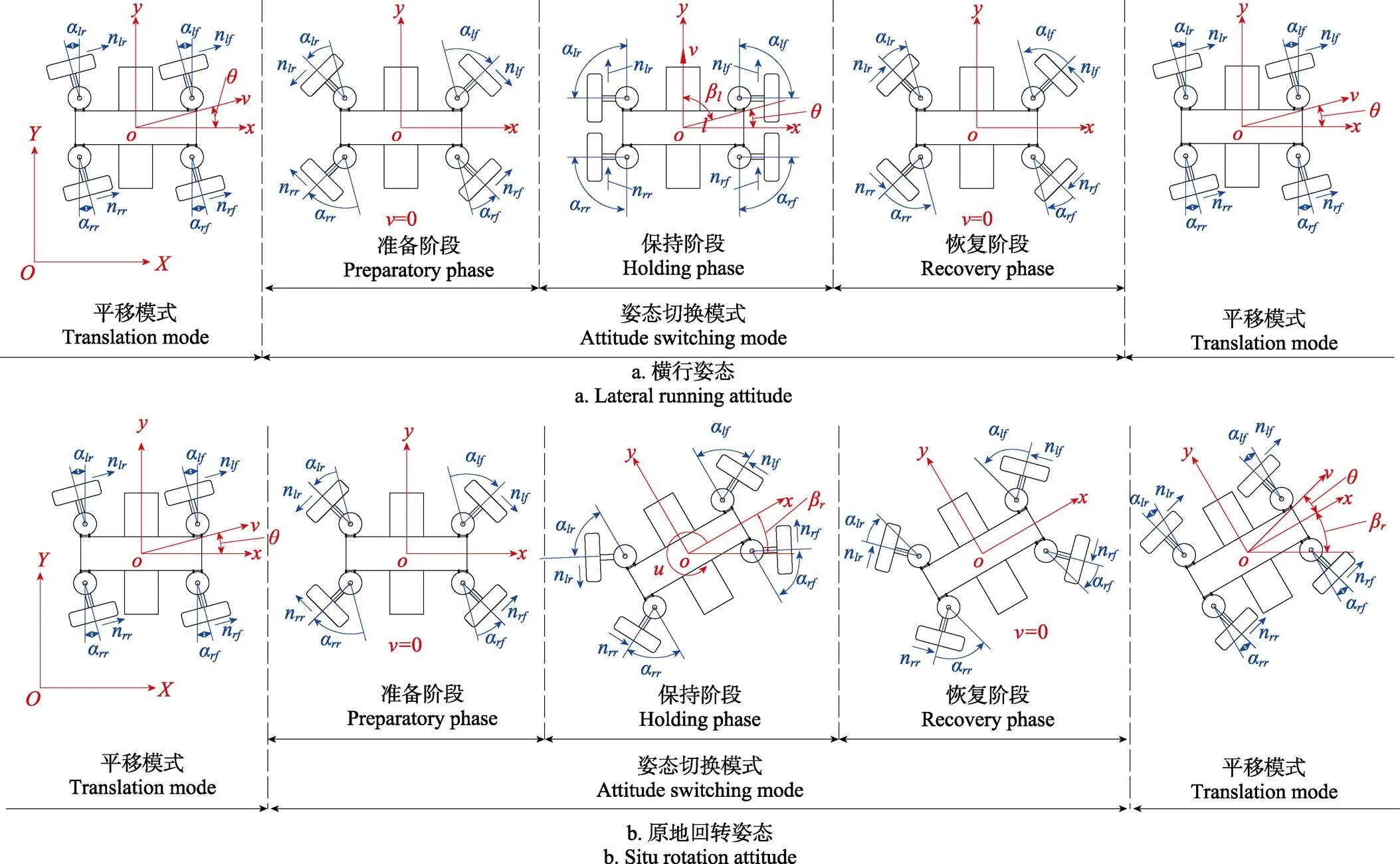
注:XOY为地面坐标系;xoy为底盘坐标系;v为底盘的平移速度,m·s–1;u为底盘的原地回转速度,rad·s–1;βl为底盘在横行姿态下的切换角度,(°);βr为底盘在原地回转姿态下的切换角度,(°);θ为底盘的平移角度,(°);ni (i=lf, rf, lr, rr)为4个单轮行走系的电机转速,r·min–1;αi (i=lf, rf, lr, rr)为4个单轮行走系的偏置轴转角,(°);下标lf、rf、lr、rr分别表示左前、右前、左后和右后单轮行走系,下同。
1.1 准备阶段
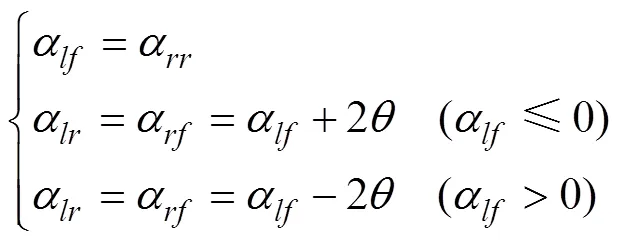
准备阶段为柔性底盘由平移模式向姿态切换模式转换的过程。横行姿态和原地回转姿态在此阶段的运行方式是一致的,即底盘坐标系相对于地面坐标系保持不变,底盘的平移速度始终为0。但在柔性底盘内部,4个单轮行走系内的轮毂电机开始运行,并解除电磁锁紧装置对偏置轴位置的限定,使4个偏置轴转角α借助轮胎与地面的摩擦力矩相互配合,以实现横行姿态或原地回转姿态所需的底盘状态。设偏置轴转角α绕各单轮行走系回转中心逆时针为正。如图1.a所示,当左前偏置轴转角α达到–90°时,底盘切换为横行姿态;如图1b所示,当左前偏置轴转角α达到–62.3°,底盘切换为原地回转姿态。而其余各单轮行走系偏置轴转角α的配合关系可依据底盘结构和姿态切换要求得出,具体如式(2)所示。
1.2 保持阶段
保持阶段为柔性底盘在横行姿态或原地回转姿态下保持固定运行状态的过程。对于横行姿态而言,柔性底盘以设定的平移速度做横向直行,即底盘坐标系相对于地面坐标系仅有平移而无转动,其切换角度β与平移角度互余。对于原地回转姿态而言,柔性底盘绕其形心以设定的回转速度原地转动,即底盘坐标系相对于地面坐标系仅有转动而无平移,其切换角度β为[–180°, 180°]内的任意值。此阶段柔性底盘4个单轮行走系内的电磁锁紧装置一直处于工作状态,保证4个偏置轴转角α始终稳定在所需的固定值。
1.3 恢复阶段
恢复阶段为柔性底盘在完成所需的切换姿态运行后,重新向平移模式转换的过程。其运行状态和各项参数之间的关系都与准备阶段保持一致而方向相反,即恢复阶段与准备阶段为互逆变化过程。由于2种切换姿态在保持阶段的运行状态不同,此阶段结束后,对于横行姿态,其底盘坐标系与地面坐标系之间无角度变化,底盘继续以平移角度直线前行;而对于原地回转姿态,底盘同样以平移角度直线前行,但底盘坐标系与地面坐标系之间会存在切换角度β,因此其在地面坐标系内的直行方向会变为(+β)。
2 姿态切换试验方案
由前述分析可知,柔性底盘的姿态切换过程较为复杂,包括了多个切换参数的变化与配合。其在准备与恢复阶段主要为柔性底盘内部的4个单轮行走系偏置轴转角α和轮毂电机转速n的相互配合;而在保持阶段主要为柔性底盘整机的横向直行或原地回转。
另外,从姿态切换3个阶段的角度考虑,准备阶段的运行效果必定会对保持阶段的运行效果造成影响;而恢复阶段则会受到准备与保持阶段的共同作用,并对后续的底盘运行造成影响。
因此,需要根据柔性底盘在不同姿态切换阶段中各种运动方式的共性与差异来设计分步试验,以得到底盘采用不同切换姿态在各阶段的运行规律。并通过分步试验结果来优化底盘姿态切换的整个过程。
2.1 试验因素与指标
由于底盘在姿态切换各阶段运动的多样性,在采用分步试验时,其试验因素与指标之间的关系也较为复杂,需要详细说明。
2.1.1 试验因素与水平
1)底盘的平移角度:依据柔性底盘结构与运行特性,底盘的平移角度在[0, 45°]内连续变化,并影响4个单轮行走系偏置轴转角值和底盘切换角度范围的大小。平移角度分为5水平,具体取0、15°、25°、35°和45°。
2)左前单轮行走系的电机转速n:柔性底盘在准备与恢复阶段中,应尽可能的降低4个单轮行走系中轮毂电机的转速值,以保证4个单轮行走系偏置轴转角相互配合的稳定性。通过试验测定,轮毂电机的最低稳定转速约为5.4 r/min,并且当轮毂电机转速大于约20 r/min时,各单轮行走系已不能稳定输出正确的偏置轴转角值。因此,取电机转速范围为[5.4, 20] r/min。左前单轮行走系电机转速n分为5水平,具体取5.4、8、12、16和20 r/min。
3)底盘的切换角度β和β:在横行姿态下,切换角度β仅为(90°-);在回转姿态下,切换角度β的范围为(0, 180°)。横行姿态的切换角度β为(90°-)的单水平试验;原地回转姿态的切换角度β分为4水平,具体取45°、90°、135°和180°。
4)底盘的平移速度:当不考虑平移模式时,柔性底盘只有在横行姿态的保持阶段,才存在横向平移。当柔性底盘工作在设施农业内部,从环境复杂度和使用安全的角度考虑,其运行速度应限定在[1, 4] m/s的范围内。平移速度分为4水平,具体取1、2、3和4 m/s。
5)底盘的回转速度:柔性底盘在原地回转过程中,其回转速度过大时,会造成底盘在制动过程中失稳,无法维持原地回转的位置。通过试验测定,回转速度的稳定最低值约为0.349 rad/s,稳定最高值约为0.785 rad/s。因此,取回转速度范围为[0.35, 0.78] rad/s。回转速度分为4水平,具体取0.35、0.50、0.65和0.78 rad/s。
上述各试验因素依切换姿态的不同而在各姿态切换阶段有所差异,具体如表1所示。
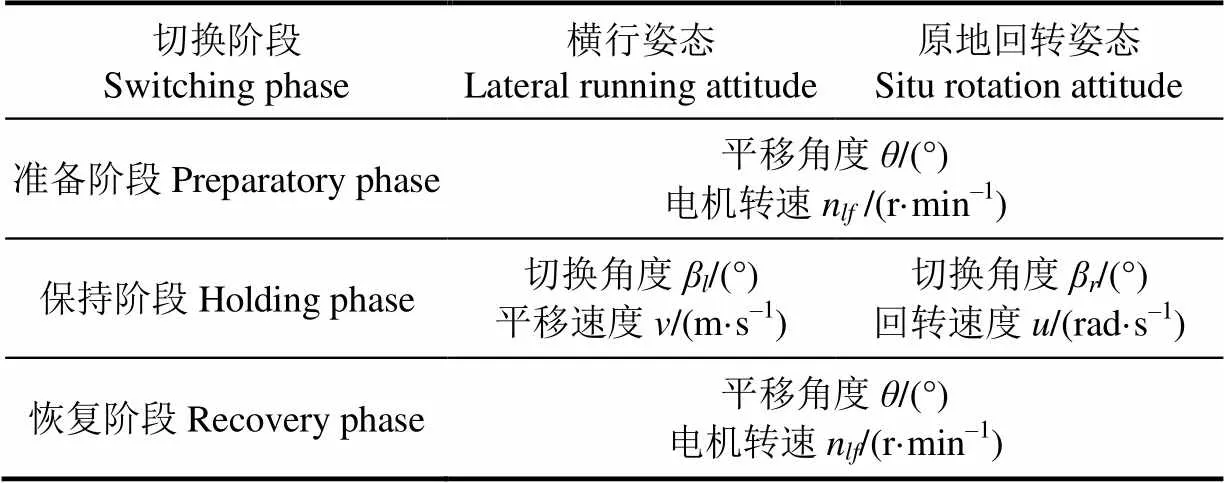
表1 柔性底盘姿态切换试验因素
2.1.2 试验指标
对柔性底盘各切换阶段的考察,主要有2个方面:1)切换效率,即底盘完成此切换阶段所花费的时间;2)切换精度,即在完成此切换阶段后底盘的状态是否稳定。
根据柔性底盘的切换阶段,其所花费的时间对应分为准备时间、保持时间和恢复时间;而各阶段完成后的精度对应分为准备精度、保持精度和恢复精度。特别的,在保持阶段中,横行姿态和原地回转姿态因运动形式的不同而需要对其时间与精度指标进一步划分。
上述各试验指标依切换姿态的不同而在各切换阶段有所差异,如表2所示。
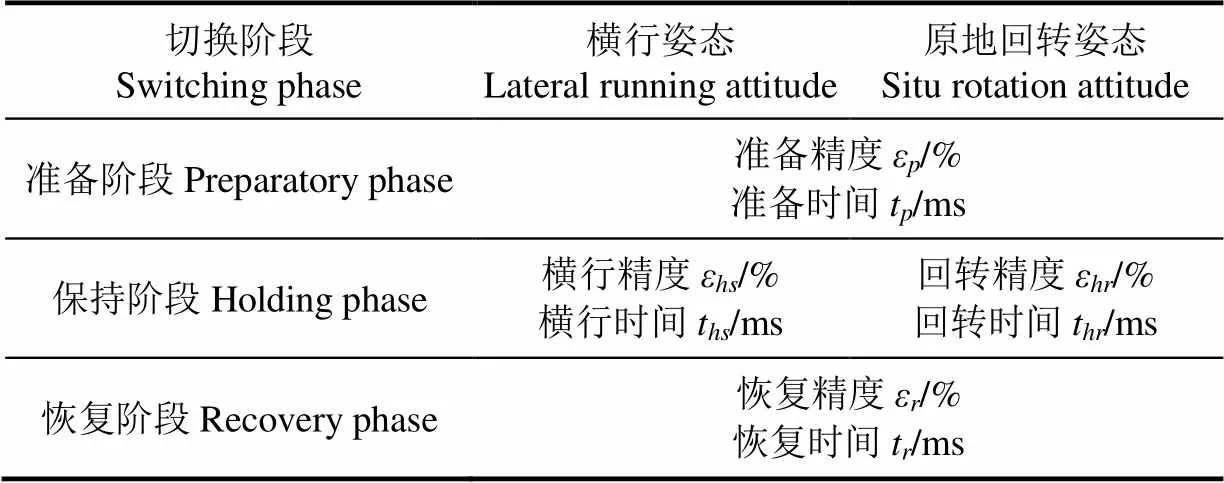
表2 柔性底盘姿态切换试验指标
由于柔性底盘在准备阶段和恢复阶段中,4个单轮行走系偏置轴转角的配合关系一致,如前述式(2)所示。具体而言,当2个阶段运转完成后,4个单轮行走系偏置轴转角的实测值越接近所要求的理论值时,即4个单轮行走系偏置轴转角精度越高时,柔性底盘的运行状态就越稳定。另外,柔性底盘在2个阶段运转完成后的状态,是4个单轮行走系偏置轴转角相互配合的结果。同时,4个单轮行走系的结构和功能相同,并采用对称布置,对底盘运行状态的影响效果是一致的。因此,柔性底盘在准备阶段和恢复阶段的准备精度和恢复精度,为4个单轮行走系偏置轴转角精度的平均值,具体如式(3)所示。

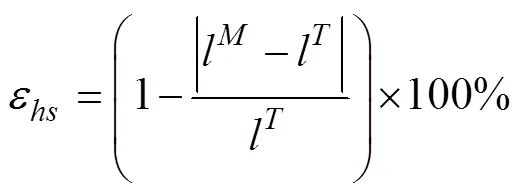
当采用横行姿态时,柔性底盘在保持阶段的运行状态为横向平移运动。当此阶段运行完成后,横向行驶的直线距离的实测值越接近设定的理论值,即横行距离的精度越高,柔性底盘的运行状态越稳定。横行精度的具体计算如式(4)所示:
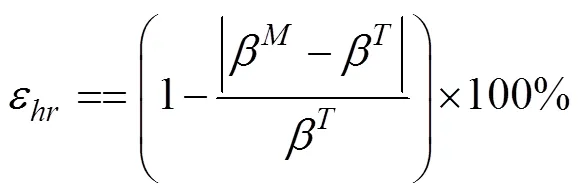
当采用原地回转姿态时,柔性底盘在保持阶段的运行状态为原地回转运动。当此阶段运行完成后,原地回转所转过角度的实测值越接近设定的理论值,即原地回转角度的精度越高,柔性底盘的运行状态越稳定。回转精度的具体计算如式(5)所示:
2.2 试验准备与实施
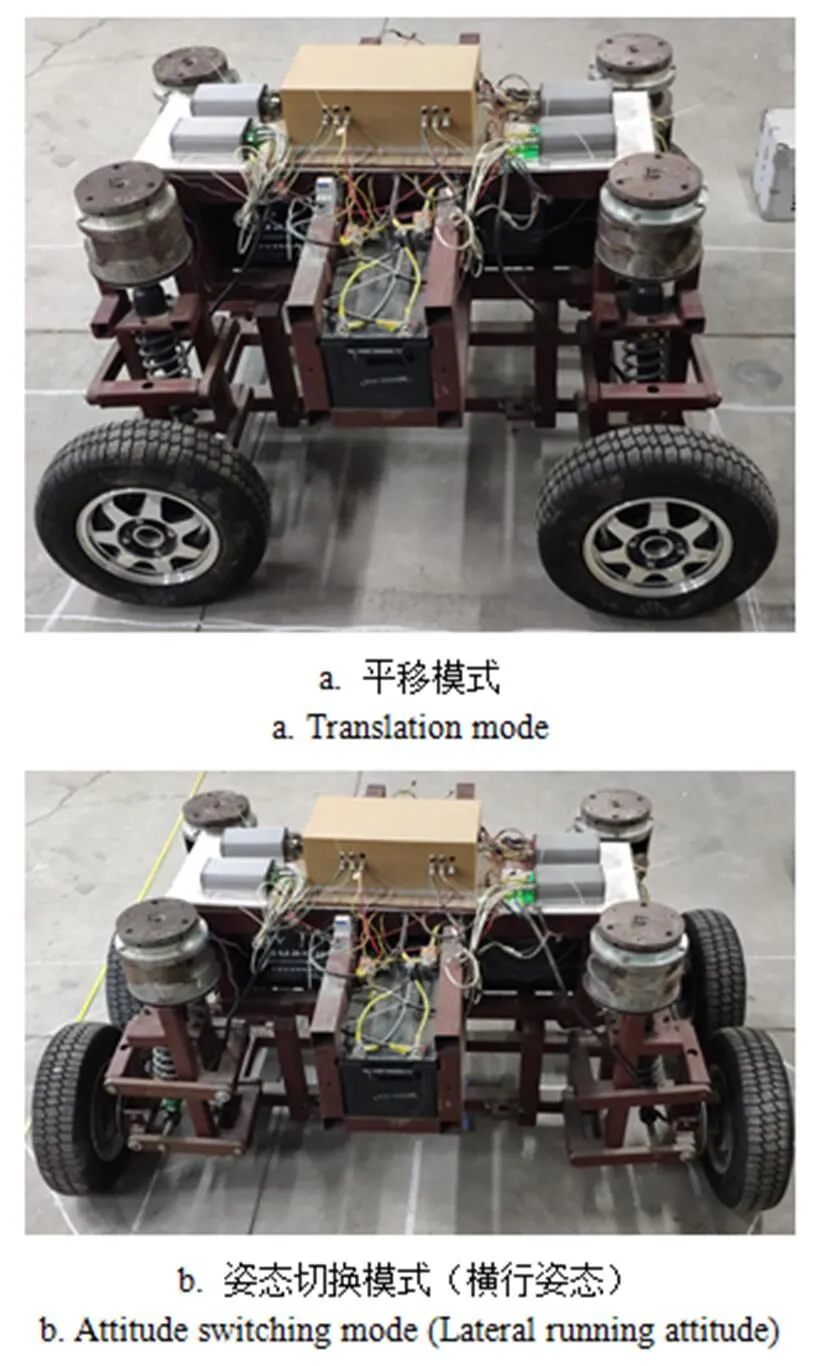
选取柔性底盘二代样机为测试对象进行试验,选用平直的水泥路面作为测试场地。2种切换姿态下的分段试验各重复5次。柔性底盘二代样机以及运行模式如图2所示。
各单轮行走系偏置轴转角α的测量值采用上海盘卓自动化科技有限公司生产的P3022-V1-CW360型霍尔角度传感器进行测量,其分辨率为0.01°,机械行程为0~360°。通过式(3)得到准备精度ε和恢复精度ε。
柔性底盘在横行姿态保持阶段的平移距离通过手工测量,采用上海美耐特实业有限公司生产的MNT135008型圆盘尺,其测量范围为0~50 m,精度为1 mm。通过式(4)得到横行姿态的横行精度ε。
柔性底盘在原地回转姿态保持阶段的切换角度β采用深圳维特智能科技有限公司生产的WT-901型九轴陀螺仪姿态传感器进行测量,其角度量程为±180°,分辨率为0.6(°)/s,动态精度为0.1°。通过式(5)得到回转精度ε。
柔性底盘在各运行阶段所持续的时间由意法半导体集团生产的STM32F103ZET6型MCU监测,采用内部16位的通用定时器进行数据采集,并输出为准备时间t、横行时间t、回转时间t和恢复时间t。
3 试验结果与分析
3.1 准备与恢复阶段试验结果与分析
图3和表3分别为为柔性底盘2种切换姿态中准备阶段和恢复阶段的试验结果和方差分析。精度指标测试结果表明,横行姿态和原地回转姿态的准备精度ε整体上都略高于恢复精度ε;并且横行姿态的准备精度ε和恢复精度ε略高于原地回转姿态。在横行姿态中,准备精度ε的范围为96.03%~99.53%,恢复精度ε的范围为95.70%~99.31%;在原地回转姿态中,准备精度ε的范围为94.25%~99.06%,恢复精度ε的范围为94.34%~98.87%。方差分析表明,2种切换姿态在准备(恢复)阶段中,平移角度和电机转速n对准备与恢复精度都有极显著影响,对准备与恢复精度的影响程度一致,为平移角度<电机转速n。原地回转姿态下的平移角度对准备与恢复精度的影响程度大于横行姿态,而电机转速n的影响程度近似,二者间的交互作用在2种切换姿态下无影响。
图3 平移角度与电机转速对准备(恢复)阶段的影响
表3 准备(恢复)阶段试验结果方差分析
时间指标测试结果表明,2种切换姿态的准备时间t整体上略短于恢复时间t;横行姿态的总体时间也略短于原地回转姿态。在横行姿态中,准备时间t的范围为1 415~4 560 ms,恢复时间t的范围为1 518~4 699 ms;在原地回转姿态中,准备时间t的范围为1 773~4 560 ms,恢复时间t的范围为1 577~4 750 ms。方差分析表明,2种切换姿态程中,平移角度和电机转速n对准备与恢复时间有极显著的影响。其影响程度对于2种姿态的准备与恢复时间而言是一致的,为平移角度>电机转速n。2种姿态中,各因素对准备与恢复时间的影响程度近似,而二者间的交互作用在2种切换姿态下无影响。
3.2 保持阶段试验结果与分析
图4和表4分别为为柔性底盘横行姿态中保持阶段的试验结果和方差分析。精度和时间指标测试结果表明,在横行姿态的保持阶段中,柔性底盘的横行精度ε较为稳定,其范围为93.86%~95.45%;而其横行时间t随平移速度变动剧烈,其范围为14 686~31 811 ms。方差分析表明,平移速度对横行精度ε和横行时间t都有极显著的影响。
图5和表5分别为为柔性底盘原地回转姿态中保持阶段的试验结果和方差分析。在原地回转姿态的保持阶段,其回转精度ε的变动范围较大,从90.68%~99.55%;并且回转时间t的跨度较大,从2 091 ms到9 894 ms。方差分析表明,切换角度β和回转速度对回转精度ε有极显著的影响,二者间的交互作用则无影响,其影响程度为切换角度β>回转速度;切换角度β、回转速度以及二者间的交互作用都对回转时间t有极显著的影响,其影响程度为切换角度β>回转速度>交互作用。
图4 平移速度对横行姿态保持阶段的影响
表4 横行姿态保持阶段试验结果方差分析

图5 切换角度与回转速度对原地回转姿态保持阶段的影响
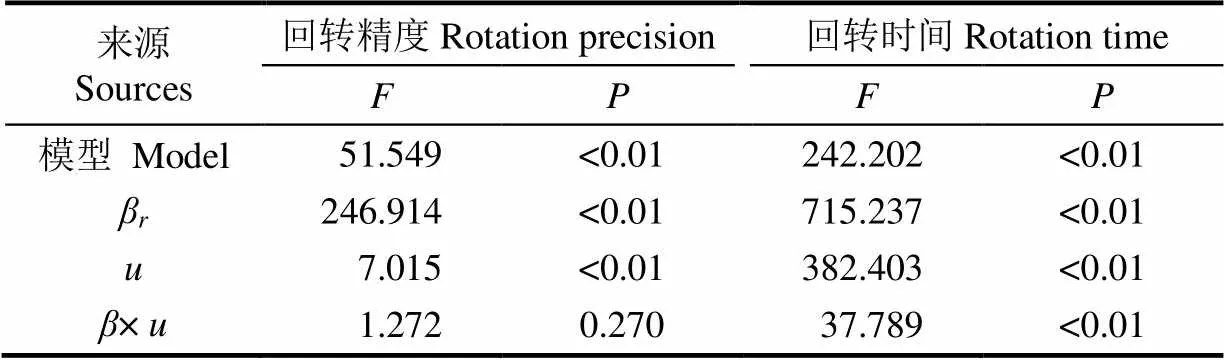
表5 原地回转姿态保持阶段试验结果方差分析
3.3 姿态切换状态模型
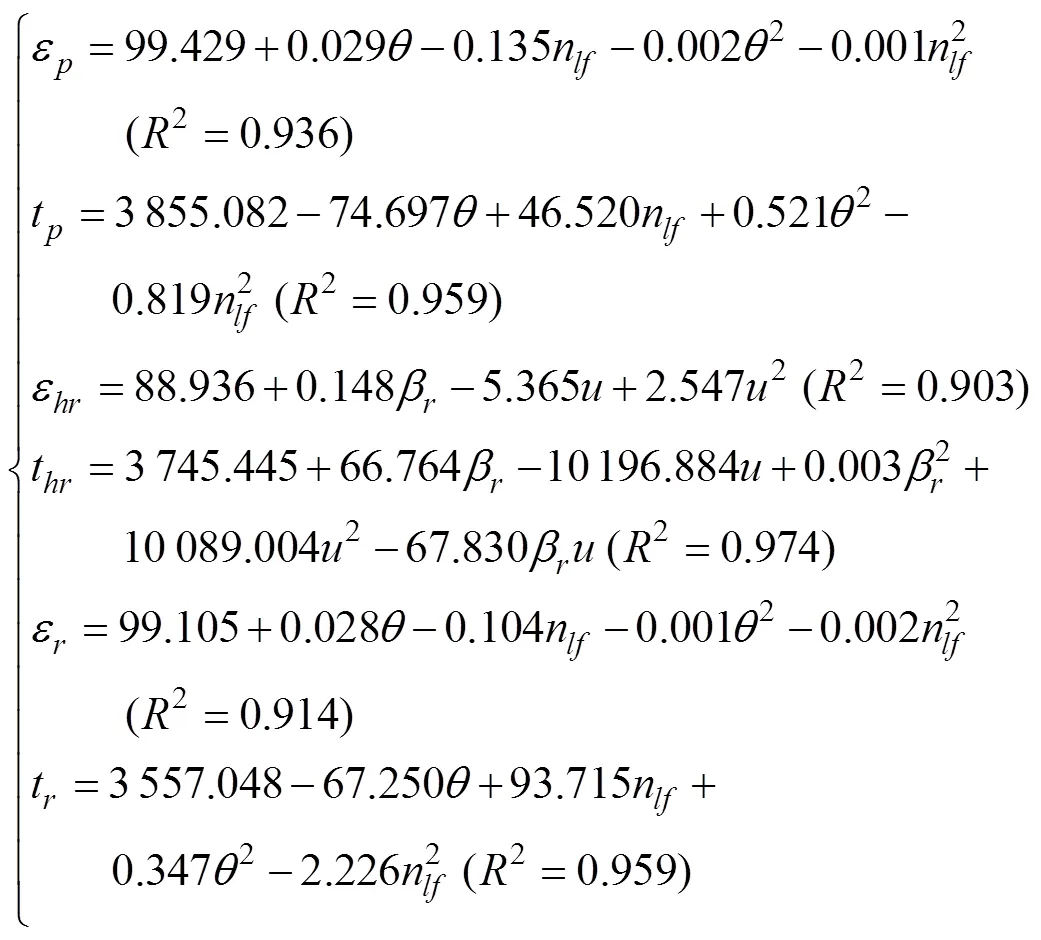
采用SPSS软件对各试验结果进行回归分析,以求得2种切换姿态在整个切换过程中各指标的变化规律。依据切换姿态和3个切换阶段将各回归方程构建为2组柔性底盘姿态切换状态模型。其中横行姿态包括准备精度ε和时间t,横行精度ε和时间t,以及恢复精度ε和时间t;而原地回转姿态包括准备精度ε和时间t,回转精度ε和时间t,以及恢复精度ε和时间t。各模型及其决定系数2具体表述如下:
横行姿态:
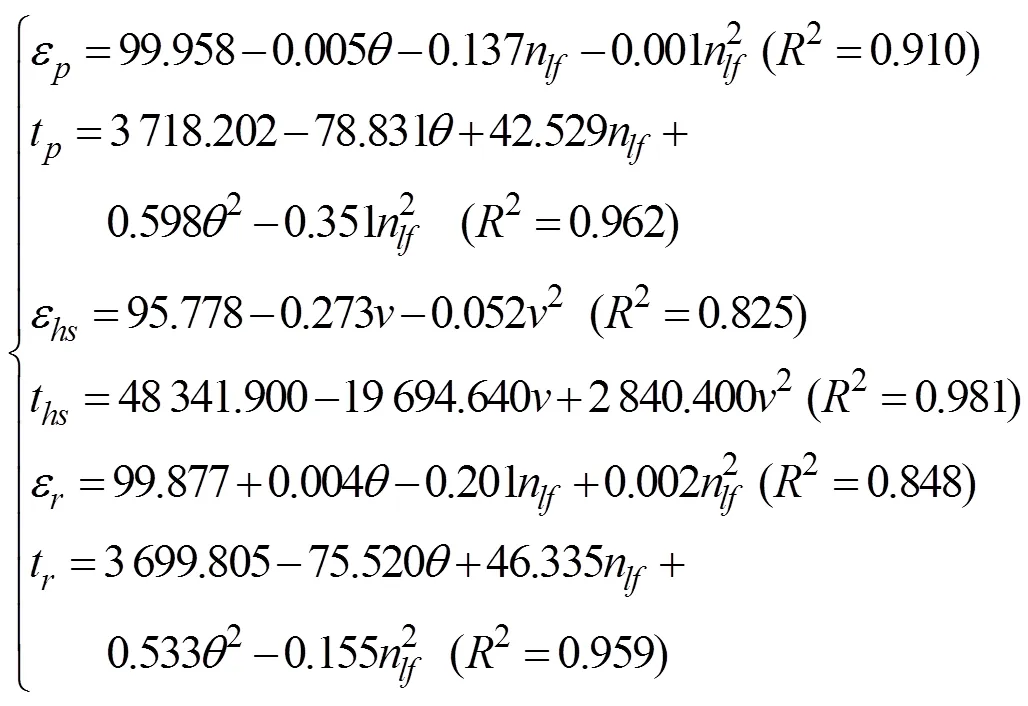
回转姿态:
4 姿态切换模式参数优化
为了保证柔性底盘在2种切换姿态下,运行过程的稳定可靠,需要根据上述姿态切换状态模型进行最优解的求解与验证。
4.1 指标权重确定
由于柔性底盘的切换过程为切换姿态和切换阶段共同作用的结果,因此各试验指标的相对重要性也各不相同[15-18]。所以在进行最优解求解前,需要对各试验指标的权重值进行分析,具体采用层次分析法来确定[19-21]。
将3个切换阶段定义为一级指标,各切换阶段内被测量的试验指标定义为二级指标,对上述指标以相对重要性进行两两对比,以1~9的标度对对比结果进行量化,构造各判断矩阵。对判断矩阵进行单排序计算来确定出各指标的权重,并对各判断矩阵进行一致性检验来保证计算结果的科学性和可靠性[22-24]。
各级指标的权重确定遵循以下原则:1)2种姿态的各阶段权重分布一致,即准备阶段>保持阶段>恢复阶段;2)原地回转姿态的保持阶段相对于横行姿态而言,其对整个换向过程的影响更大;3)在各阶段内,各项精度指标的比重都要大于与之相对应的时间指标。各级指标的相对权重和二级指标权重值的计算结果如表6所示。
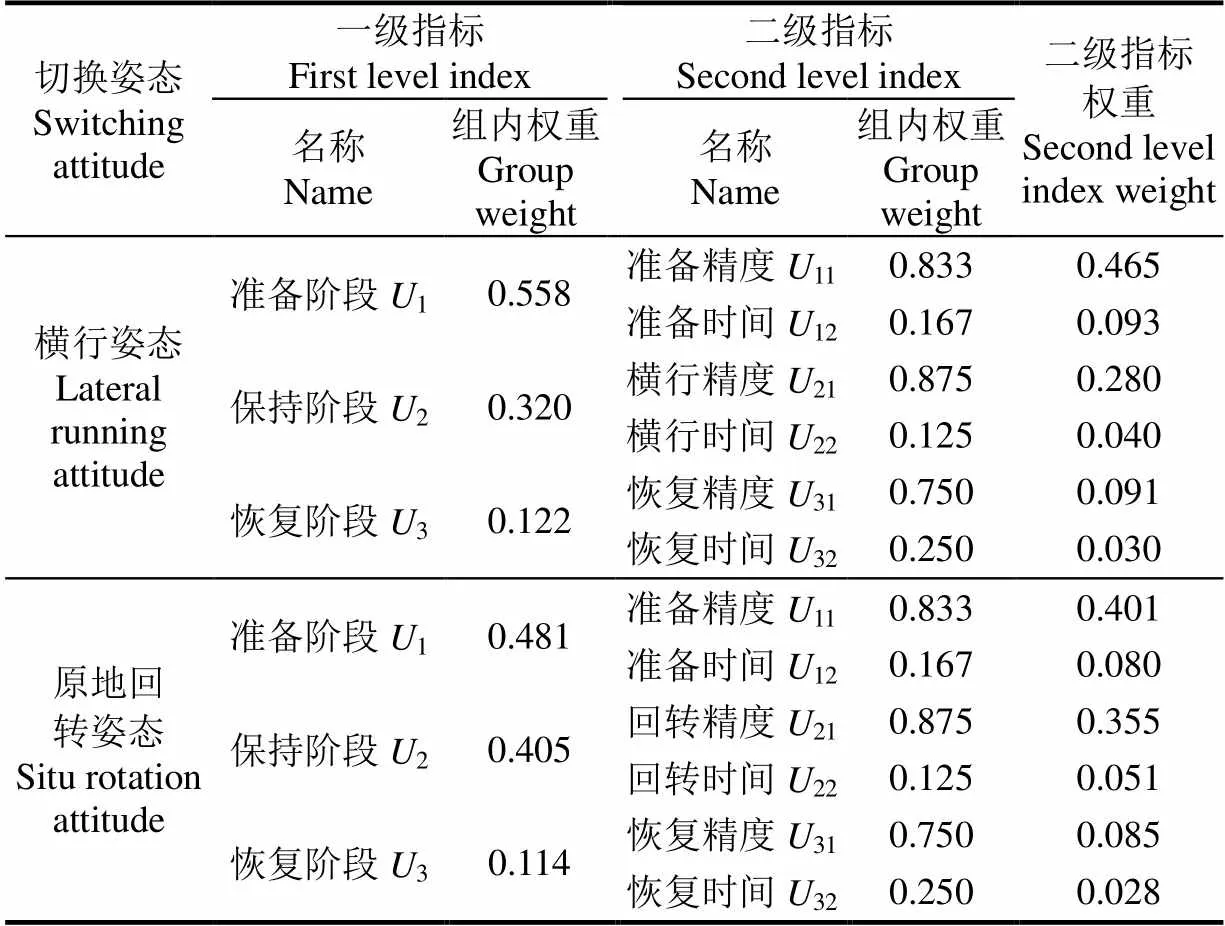
表6 姿态切换优化指标权重
4.2 参数优化
对于多元非线性方程组的计算,宜采用遗传算法进行[25-28]。其中种群大小为300,迭代次数为200[29-30];遗传操作为轮盘赌选择法,单点交叉法,变异采用小概率变异[31-32]。
采用Matlab软件进行编程并计算,2种切换姿态的参数优化结果如图6所示。横行姿态中,在任意平移角度下,电机转速n和平移速度始终维持不变,前者处于最低值5.4 r/min,后者处于较高值3.45 m/s。原地回转姿态中,在任意平移角度下,电机转速n不随切换角度β的增加而发生变化,始终维持在最低值5.4 r/min;而回转速度随切换角度β的增加而线性增加,表现为=(0.003 3β+0.506 8) rad/s(2=0.999),并且当切换角度β达到85°时,回转速度达到最大值0.78 rad/s并持续稳定。

图6 最优参数的变化趋势
4.3 参数优化结果与验证
4.3.1 优化结果验证
在与前述试验相同的条件下,对2种切换姿态的参数优化结果进行试验验证。对于横行姿态,平移角度的水平分别为0、15°、30°和45°;对于原地回转姿态,设定平移角度为45°,切换角度的水平分别为45°、90°、135°和180°。其余各参数按前述优化结果给定。
此时,需要考察的是柔性底盘完成整个姿态切换过程的结果,即试验指标为综合精度ε和综合时间t。前者通过各阶段运行精度的乘积表示,后者通过各阶段运行时间之和来表示。各试验重复5次,取综合精度ε与综合时间t的试验值的平均数与理论值进行对比,并标明其标准差。试验结果如图7所示。
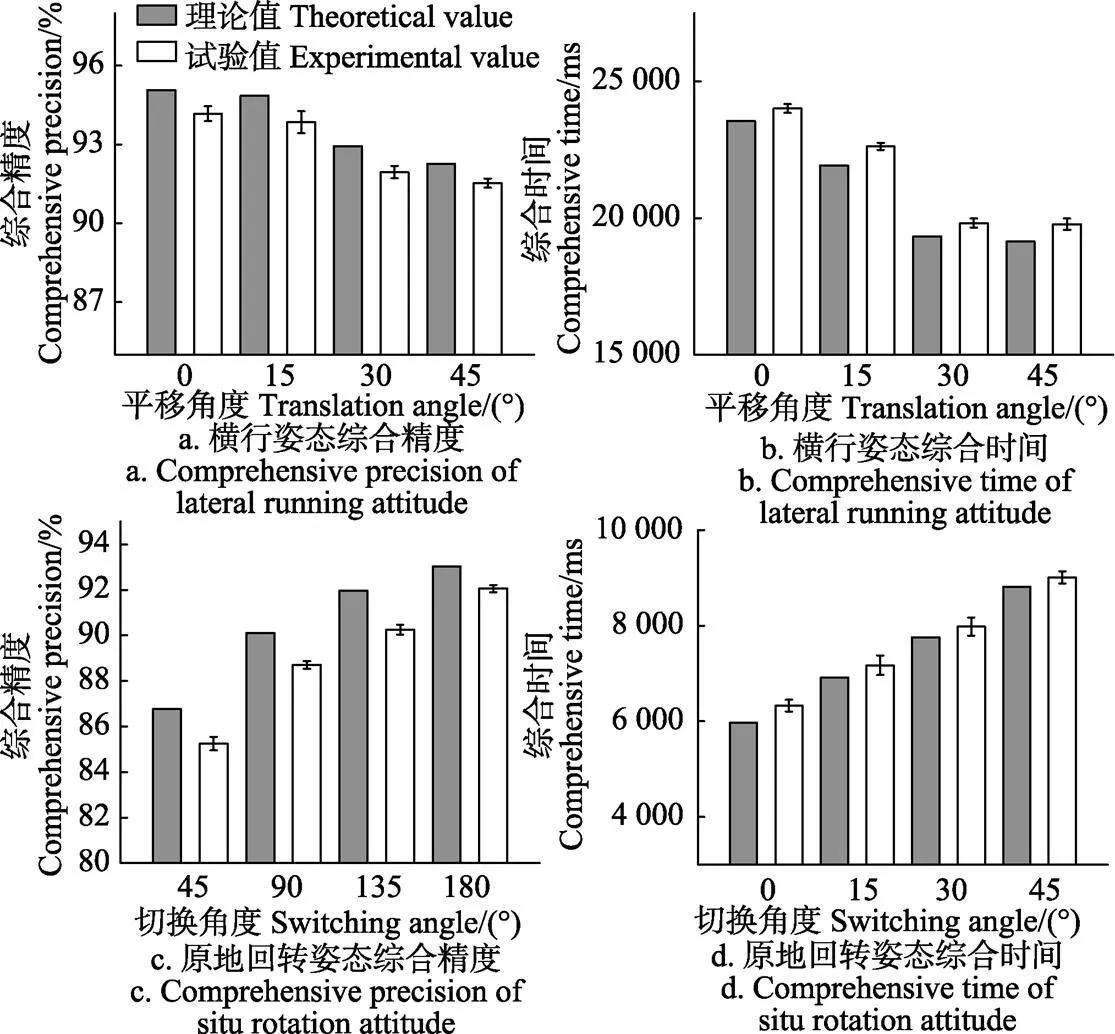
图7 优化参数下的姿态切换结果验证
从图7中可以看出,2种切换姿态中综合精度ε和综合时间t的理论值和试验值的总体趋势都保持一致。对于综合精度ε来说,试验值略微偏低,在横行姿态中其最大偏差为1.00%,最小偏差为0.75%;在原地回转姿态中,其最大偏差为1.70%,最小偏差为0.97%。对于综合时间t来说,试验值总体偏高,在横行姿态中其最大偏差为698 ms,最小偏差为454 ms;在原地回转姿态中,其最大偏差为361 ms,最小偏差为191 ms。
验证试验中,试验精度偏低与试验时间偏高的原因在于,柔性底盘姿态切换状态模型依据分步试验建立,而验证试验为完整的姿态切换过程,受各阶段相互作用导致的误差累计更加明显,但在可接受的范围之内。
4.3.2 对比验证
由前述试验分析可知,在姿态切换模式的3个阶段中,当柔性底盘以横行姿态或原地回转姿态运行时,相关试验因素对底盘各精度和时间指标的影响总体上呈相反趋势。具体而言,若没有进行切换参数优化,则当底盘以最低速运行时,整个运行过程最为稳定,各项精度指标表现良好,但底盘姿态切换的效率大大降低;当底盘以最高速运行时,整个运行过程的稳定性变差,各项精度指标下降明显,但底盘姿态切换的效率最高。因此,通过对比试验来验证各切换参数在优化前后对柔性底盘姿态切换过程的影响。
该验证试验的具体试验条件与前述试验相同。在横行姿态中,平移角度取值为45°;在原地回转姿态中,平移角度和切换角度β分别取值为25°和45°。
试验分为3组:1)优化参数组;2)精度优先组;3)时间优先组。优化参数组中,电机转速n、平移速度和回转速度按前述优化内容给出,分别为5.4 r/min、3.45 m/s和0.66 rad/s。精度优先组中,电机转速n、平移速度和回转速度按最小值选定,分别为5.4 r/min、1 m/s和0.35 rad/s。时间优先组中,电机转速n、平移速度和回转速度按最大值选定,分别为20 r/min、4 m/s和0.78 rad/s。
以上各试验重复5,取各精度和时间指标的平均值,并标注其标准差。试验结果如图8所示。
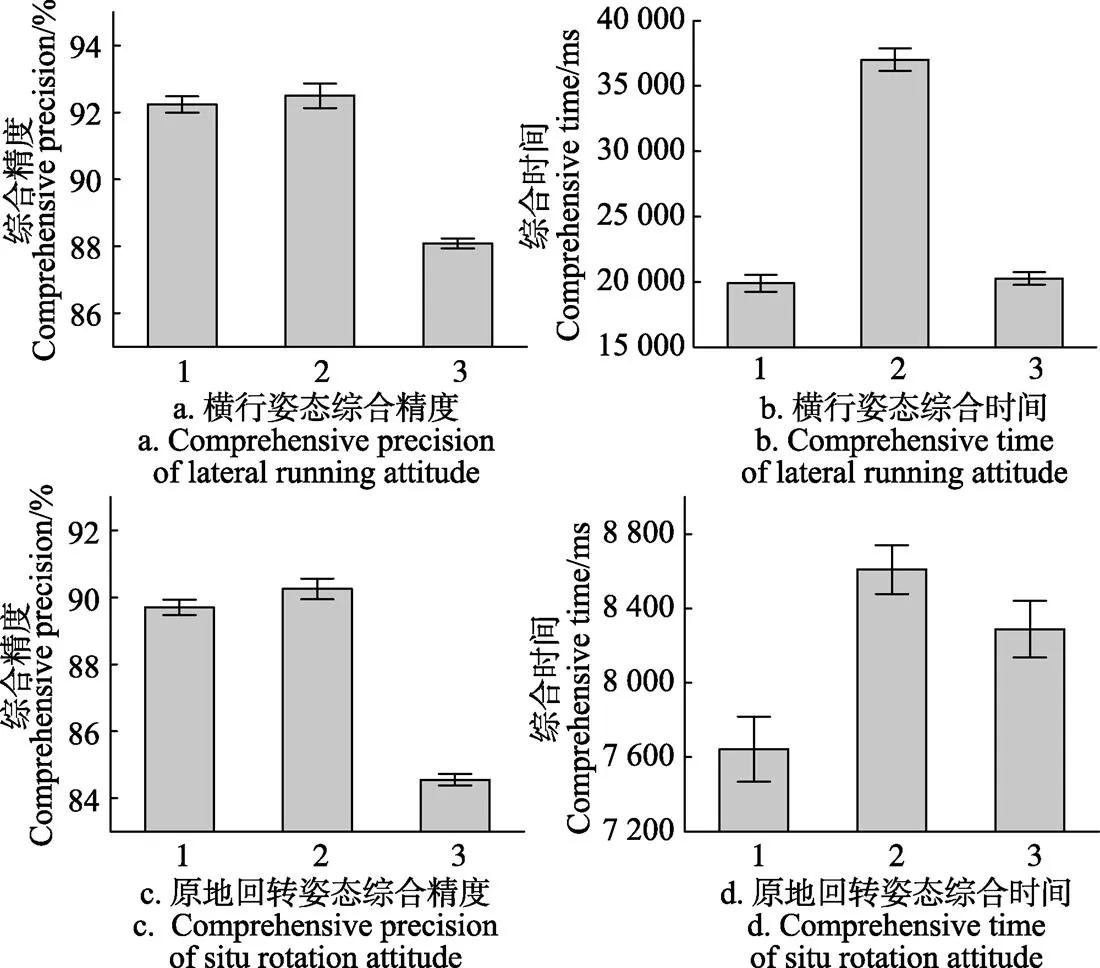
注:1、2、3分别表示优化参数组、精度优先组和时间优先组。
从图8中可以看出,在横行姿态下,优化参数组、精度优先组和时间优先组的综合精度ε分别为92.24%、92.50%和88.08%,综合时间t分别为19 893、37 003和20 256 ms。优化参数组的综合精度与精度优先组持平并高出时间优先组4.16%,综合时间与时间优先组持平并少于精度优先组17 110 ms。在原地回转姿态下,优化参数组、精度优先组和时间优先组的综合精度ε分别为89.70%、90.25%和84.55%,综合时间t分别为7 643 ms、8 609 ms和8 289 ms。优化参数组的综合精度与精度优先组持平并高出时间优先组5.15%,综合时间少于时间优先组646 ms并少于精度优先组996 ms。
以上对比试验结果说明,相对于未优化的姿态切换过程,采用层次分析法和遗传算法对柔性底盘姿态切换参数进行优化后,能够保证柔性底盘在略微损失运行精度的情况下,以较快的运行效率完成其姿态切换过程。
5 结 论
1)柔性底盘的横行或原地回转姿态通过准备、保持与恢复3个阶段完成姿态切换过程。切换参数包括平移角度、电机转速、切换角度、平移速度和回转速度。底盘的准备与恢复阶段中,平移角度和电机转速对2种切换姿态的影响趋于一致,影响准备与恢复精度的主次因素为电机转速>平移角度;影响准备与恢复时间的主次因素为平移角度>电机转速。底盘的保持阶段中,对于横行姿态而言,平移速度对其横行精度和时间都有极显著影响。而对于原地回转姿态,影响回转精度的主次因素为切换角度>回转速度;影响回转时间的主次因素为切换角度>回转速度>交互作用。
2)依据柔性底盘姿态切换各阶段的试验结果,得到由多元非线性方程组构建的柔性底盘姿态切换状态模型。模型中各精度指标回归方程的2∈[0.825, 0.936],各时间指标回归方程的2∈[0.959, 0.981]。
3)采用层次分析法确定了各试验指标的权重值,通过遗传算法对柔性底盘姿态切换状态模型的最优解进行了计算,并通过验证试验证明了模型的有效性。优化结果表明:横行姿态中,任意平移角度下,最优电机转速为5.4 r/min,最优平移速度为3.45 m/s。原地回转姿态中,任意平移角度下,最优电机转速为5.4 r/min;当切换角度β∈(0, 85)°时,最优回转速度为(0.003 3β+0.506 8) rad/s,当切换角度β≥85°时,最优回转速度为0.78 rad/s。
[1] 肖体琼,何春霞,陈巧敏,等. 基于机械化生产视角的中国蔬菜成本收益分析[J]. 农业机械学报,2015,46(5):75-82. Xiao Tiqiong, He Chunxia, Chen Qiaomin, et al. Cost-benefit analysis of vegetable production based on agricultural mechanized production[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(5): 75-82. (in Chinese with English abstract)
[2] 齐飞,魏晓明,张跃峰. 中国设施园艺装备技术发展现状与未来研究方向[J]. 农业工程学报,2017,33(24):1-9. Qi Fei, Wei Xiaoming, Zhang Yuefeng. Development status and future research emphase on greenhouse horticultural equipment and its relative technology in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 1-9. (in Chinese with English abstract)
[3] Trypanagnostopoulos G, Kavga A, Souliotis M, et al. Greenhouse performance results for roof installed photovoltaics[J]. Renewable Energy, 2017(111): 724-731.
[4] 张铁民,黄翰,黄鹏焕. 电动轮式移动小车控制系统设计与试验[J]. 农业工程学报,2014,30(19):11-18. Zhang Tiemin, Huang Han, Huang Penghuan. Design and test of drive and control system for electric wheeled mobile car[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(19): 11-18. (in Chinese with English abstract)
[5] 张铁民,李辉辉,陈大为,等. 多源传感器信息融合的农用小车路径跟踪导航系统[J]. 农业机械学报,2015,46(3):37-42. Zhang Tiemin, Li Huihui, Chen Dawei, et al. Agricultural vehicle path tracking navigation system based on information fusion of multi-source sensor[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 37-42. (in Chinese with English abstract)
[6] 张京,陈度,王书茂,等. 农用轮式机器人四轮独立转向驱动控制系统设计与试验[J]. 农业工程学报,2015,31(18):63-70. Zhang Jing, Chen Du, Wang Shumao, et al. Design and experiment of four-wheel independent steering driving and control system for agricultural wheeled robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 63-70. (in Chinese with English abstract)
[7] Ko M H, Ryuh B S, Kim K C, et al. Autonomous greenhouse mobile robot driving strategies from system integration perspective: Review and application[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(4): 1705-1716.
[8] Oksanen T and Linkolehto R. Control of four wheel steering using independent actuators[J]. 4th IFAC Conference on Modelling and Control in Agriculture, Horticulture and Post Harvest Industry. Finland: IFAC Secretariat, 2013, 46(18): 159-163.
[9] 宋树杰,瞿济伟,李翊宁,等. 农用车底盘偏置转向轴驱动轮运动与动力特性试验[J]. 农业工程学报,2015,31(23):28-34. Song Shujie, Qu Jiwei, Li Yining, et al. Experiment on movement and dynamic property of driving wheel with offset steering shaft for agricultural vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(23): 28-34. (in Chinese with English abstract)
[10] 宋树杰,李翊宁,瞿济伟,等. 柔性底盘性能检测试验台设计与应用[J]. 农业机械学报,2016,47(2):77-83. Song Shujie, Li Yining, Qu Jiwei, et al. Development and application of test bench for flexible chassis[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(2): 77-83. (in Chinese with English abstract)
[11] Song S J, Li Y N, Qu J W, et al., Design and test of flexible chassis automatic tracking steering system[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(5): 45-54.
[12] 瞿济伟,郭康权,高华,等. 基于PWM信号的农用柔性底盘驱动与转向协同控制特性试验[J]. 农业工程学报,2018,34(7):75-81. Qu Jiwei, Guo Kangquan, Gao Hua, et al. Experiments on collaborative characteristics of driving and steering for agricultural flexible chassis based on PWM signal[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(7): 75-81. (in Chinese with English abstract)
[13] 瞿济伟,郭康权,李翊宁,等. 农用柔性底盘模式切换控制参数试验与优化[J]. 农业机械学报,2018,49(9):346-352. Qu Jiwei, Guo Kangquan, Li Yining, et al. Experiment and optimization of mode switching controlling parameters for agricultural flexible chassis[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(9): 346-352. (in Chinese with English abstract)
[14] 李翊宁,周伟,宋树杰,等. 温室作业用柔性底盘试验样机的设计[J]. 农业工程学报,2017,33(19):41-50. Li Yining, Zhou Wei, Song Shujie, et al. Design of experimental prototype of flexible chassis used in greenhouse[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(19): 41-50. (in Chinese with English abstract)
[15] 向欣,罗煜,程红胜,等. 基于层次分析法和模糊综合评价的沼气工程技术筛选[J]. 农业工程学报,2014,30(18):205-212. Xiang Xin, Luo Yu, Cheng Hongsheng, et al. Biogas engineering technology screening based on analytic hierarchy process and fuzzy comprehensive evaluation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(18): 205-212. (in Chinese with English abstract)
[16] Jote N, Beshah B, Kitaw D. Ethiopian livestock husbandry cluster identification using FUZZY-AHP approach[J]. Advances in Intelligent Systems and Computing, 2015(334): 233-243.
[17] Svoray T, Levi R, Zaidenberg R, et al. The effect of cultivation method on erosion in agricultural catchments: Integrating AHP in GIS environments[J]. Earth Surface Processes and Landforms, 2015, 40(6): 711-725.
[18] Huang W, Liu H J. Application of fuzzy dynamic weights drivability evaluation model in tip-in condition[J]. Journal of Vibration and Control, 2019, 25(4): 739-747.
[19] 龚艳,张晓,刘燕,等. 基于层次分析法的植保机械适用性综合评价方法[J]. 农业机械学报,2016,47(9):73-78. Gong Yan, Zhang Xiao, Liu Yan, et al. Comprehensive evaluation method for applicability of plant protection machinery based on analytic hierarchy process[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9): 73-78. (in Chinese with English abstract)
[20] Kumar A, Singh A R, Deng Y, et al. Integrated assessment of a sustainable microgrid for a remote village in hilly region[J]. Energy Conversion and Management, 2019(180): 442-472.
[21] 李风,付开进,于向军. 基于层次分析法的大型半自磨机磨矿性能优化[J]. 农业机械学报,2017,48(6):392-398. Li Feng, Fu Kaijin, Yu Xiangjun. Optimization of grinding performance for large-type semi-autogenous mill based on analytic hierarchy process[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(6): 392-398. (in Chinese with English abstract)
[22] Zhang J Q, Su Y R, Wu J S, et al. GIS based land suitability assessment for tobacco production using AHP and fuzzy set in Shandong province of China[J]. Computers and Electronics in Agriculture, 2017, 48(6): 392-398.
[23] Veisi H, Liaghati H, Alipour A. Developing an ethics-based approach to indicators of sustainable agriculture using analytic hierarchy process (AHP)[J]. Ecological Indicators, 2016(60): 644-654.
[24] Kuo C F J, Liu J M, Umar M L, et al. The photovoltaic- thermal system parameter optimization design and practical verification[J]. Energy Conversion and Management, 2019(180): 358-371.
[25] 赵淑红,刘宏俊,张先民,等. 滑推式开沟器设计与作业性能优化试验[J]. 农业工程学报,2016,32(19):26-34. Zhao Shuhong, Liu Hongjun, Zhang Xianmin, et al. Design and optimization experiment of working performance of sliding push opener[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 26-34. (in Chinese with English abstract)
[26] Caraballo S C, Rodriguez J L O, Ruiz J A L, et al. Optimization of a butterfly valve disc using 3D topology and genetic algorithms[J]. Structural and Multidisciplinary Optimization, 2017, 56(4): 941-957.
[27] Beirow B, Figaschewsky F, Kuhhorn A, et al. Vibration analysis of an axial turbine blisk with optimized intentional mistuning pattern[J]. Journal of Sound and Vibration, 2019(442): 11-27.
[28] 高若婉,李丽,梅树立,等. 基于遗传算法的苦瓜片真空冷冻干燥工艺优化[J]. 农业机械学报,2017,48(增刊):401-406. Gao Ruowan, Li Li, Mei Shuli, et al. Optimization of vacuum freeze-drying process of bitter melon slices using genetic algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(S1): 401-406. (in Chinese with English abstract)
[29] 张忠学,张世伟,郭丹丹,等. 玉米不同水肥条件的耦合效应分析与水肥配施方案寻优[J]. 农业机械学报,2017,48(9):206-214. Zhang Zhongxue, Zhang Shiwei, Guo Dandan, et al. Coupling effects of different water and fertilizer conditions and optimization of water and fertilizer schemes on maize[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(9): 206-214. (in Chinese with English abstract)
[30] Rosyid A, El-Khasawneh B, Alazzam A. Genetic and hybrid algorithms for optimization of non-singular 3PRR planar parallel kinematics mechanism for machining application[J]. Robotica, 2018, 36(6): 839-864.
[31] Khosravi H, Salehi G R, Azad M T. Design of structure and optimization of organic Rankine cycle for heat recovery from gas turbine: The use of 4E, advanced exergy and advanced exergoeconomic analysis[J]. Applied Thermal Engineering, 2019(147): 272-290.
[32] Saadabad N A, Moradi H, Vossoughi G. Dynamic modeling, optimized design, and fabrication of a 2DOF piezo-actuated stick-slip mobile microrobot[J]. Mechanism and Machine Theory, 2019(133): 514-530.
Effects of attitude switching parameters on switching precision and time of flexible chassis of agricultural vehicles and its optimization
Li Yining1, Guo Kangquan1,2※, Tran Van Cuong3, Qu Jiwei1, Gao Hua1
(1.712100,;2.712100,;3.1,15910,)
In order to study the attitude switching operation characteristics of the flexible chassis of agricultural vehicles, the attitude switching analysis of the flexible chassis and the attitude switching test based on the second-generation prototype running on the hard surface were carried out. The attitude switching state model was established, and the switching parameters were optimized by the analytic hierarchy process and genetic algorithm. The index weights were determined for the lateral running attitude and the situ rotation attitude, respectively. The first level indicator included the preparatory phase, the holding phase and the recovery phase in the attitude switching process. The secondary indicators included all test indicators such as preparatory precision, preparatory time, lateral precision, lateral time, rotation precision, rotation time, recovery precision and recovery time. The population size of genetic algorithm was 300 and the number of iterations was 200, the genetic operation was roulette selection method and single point intersection method, and the variation used the small probability variation. Through the study of the switching precision and switching time under different translation angle, motor speed, switching angle, translation speed and rotating speed were obtained, the influence of various factors and their interactions on the attitude switching of the flexible chassis and the matching relationship between different switching attitude parameters were obtained. The results showed that the primary and secondary factors affecting the preparatory and recovery precision were the translation angle
agricultural machinery; vehicles; flexible chassis; attitude switching; parameter optimization; analytic hierarchy process; genetic algorithm
2018-11-19
2019-01-24
国家自然科学基金项目(51375401)
李翊宁,博士生,主要从事智能化农业装备与技术的研究。Email:liyining_work@163.com
郭康权,教授,博士生导师,主要从事农业技术装备的研究。Email:jdgkq@nusuaf.edu.cn
10.11975/j.issn.1002-6819.2019.05.007
S229+.1;U463.1
A
1002-6819(2019)-05-0051-11
李翊宁,郭康权,陈文强,瞿济伟,高 华. 农用车柔性底盘姿态切换参数对切换精度与时间的影响及其优化[J]. 农业工程学报,2019,35(5):51-61. doi:10.11975/j.issn.1002-6819.2019.05.007 http://www.tcsae.org
Li Yining, Guo Kangquan,Tran Van Cuong, Qu Jiwei, Gao Hua. Effects of attitude switching parameters on switching precision and time of flexible chassis of agricultural vehicles and its optimization[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(5): 51-61. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.05.007 http://www.tcsae.org
