基于近场声全息的纺织装备高速运动机构噪声源识别
2019-04-25李昂昂盛晓伟孙志军
徐 洋, 李昂昂, 盛晓伟, 孙志军
(东华大学 机械工程学院, 上海 201620)
依据GB/T 50087—2013《工业企业噪声控制设计规范》规定,生产车间的噪声限值为85 dB,但现阶段我国较多纺织车间噪声在标准限值以上。纺织工人长期暴露在这种环境下,身心健康会受到严重伤害。若能准确识别出噪声源位置,则可采取针对性的措施减振降噪,甚至在产品设计阶段就能对噪声加以预估,实现低频噪声控制。
传统的噪声源识别方法主要有声压法、表面振动法和声强法等[1-3]。其中:声压法在测试时受声源及环境条件影响很大,一般用作简单的噪声源识别;表面振动法对定性分析复杂结构的噪声源具有较高的精度,但易受振动测量位置等因素的影响;声强法对测试环境要求较低,但需要布置大量检测点,且只能对稳定的工况进行逐点扫描测试,其造价高,耗时长并且试验效率低。由于高端纺织装备结构复杂,低频特征明显,干扰噪声多,因此,传统噪声源识别方法并不适用。
基于近场声全息的噪声源识别方法是阵列声学中的重要方法之一。工程中只需要使用声阵列在靠近声源的全息面上测量复声压,就可重建整个三维空间声场中任意点处的声压、质点振速、矢量声强以及声源辐射的声功率等声学量[4]。目前,由于近场声全息算法具有识别效率高、空间分辨率好、低频声源识别精度高以及声场可视化特点,在航空、车辆工程等领域都具有广泛应用[5-6]。近场声全息相关算法中,统计最优近场声全息(SONAH)[7]是近年来的新兴算法,相较于其他声全息算法在测量中的阵列限制和卷绕误差等缺陷,统计最优近场声全息算法利用有限元波叠加,算法不涉及二维傅里叶变换以及声学传播算子计算,避免了传统声全息中有限孔径效应等带来的误差;另一方面突破了阵列形式限制,可采用比
声源面积小的随机阵列测量大型结构声源,并准确实现局部声场的重建[8]。本文采用统计最优近场声全息对高端纺织装备中的典型代表簇绒地毯织机的整体以及局部区域进行噪声识别。考虑到实际测量环境背景,采用圆形旋转声振列测试系统,运用Tikhonov[9]正则化方法解决SONAH算法重建过程中由于测量误差造成的不适定问题;采用广义交叉验证法[10]选取最优正则化系数,提高重建图像精度,得出簇绒地毯织机局部区域主要噪声源的声学成像图,并结合簇绒地毯织机发声机制识别出对应噪声源位置。
1 簇绒地毯织机结构组成
图1示出织机简化结构。可知,簇绒地毯织机结构复杂,主要由提花部件、平圈送纱部件、耦连轴系部件、主轴曲柄机构和箱体等组成[11]。织机运转过程中,具有高速回转、往复、多运动耦合的复杂状况,存在多个噪声源,如电动机、电动机主轴及其从动机构产生的振动噪声和针排穿刺基布产生的摩擦噪声等。图1中黑色粗线方框为局部区域识别时声振列的覆盖范围。

图1 织机简化结构示意图Fig.1 Simplified structure representation of loom. (a)Main view; (b) Left view; (c) Right view
2 基本原理应用
2.1 SONAH原理
簇绒地毯织机所在实验室声场空间区域示意图如图2所示。簇绒地毯织机声源表面位于S处,声振列所在全息测量面在H处,声场空间Ω中任意点处r=[x,y,z](z>0)的声压P(r),可用全息面上n个测点(n=1,2,… ,M)所测声压不同权重的线性叠加表示:

(1)
式中:c(r)=[c1(r),c2(r),…,cM(r)],为权重系数列向量;cn(r)为叠加系数矩阵c(r)的第n个元素;PH=[p(rH1),p(rH2),…,p(rHM)]T为全息面测量的声压列向量;H为阵列全息面测量位置。
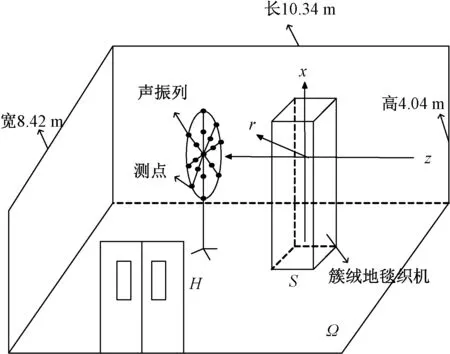
图2 实验室声场示意图Fig.2 Diagrammatic sketch of laboratory sound field
对正常工作状态下的簇绒地毯织机进行噪声信号的采集,得到复声压PH。为便于计算,将式(1)改写为矩阵形式:
α(r)=[(AT)+PH]Tα(r)
(2)
式中:α(r)为点r处的单元平面波列向量;A为全息面上多阶单元平面波叠加声场矩阵。在测量织机噪声信号时,测量误差包含在实测复声压PH一项中,并且会在(AT)+的广义逆计算过程中被放大,所以式(2)中将(AT)+PH先行计算。
2.2 Hald经验公式
Hald经验公式用于统计最优近场声全息的正则化参数求解[12]。其表达式为

(3)
式中:k为波数;zS为簇绒地毯织机噪声源面;zH为阵列全息测量面;λ为正则化参数;S为测量信号的信噪比,dB。该方法由已知条件直接确定正则化参数,在SONAH中运用该方法进行声场重建的结果稳定且计算效率较高[12],本文代入该正则化参数进行织机整体噪声源定位。
2.3 广义交叉验证法
广义交叉验证法(GCV)的基本原理是根据误差模型和正则化解构造一个GCV函数。基于Tikhonov正则化方法,通过以下函数来选取正则化系数:
(4)

对式(2)中的A进行奇异值分解:
A=U∑WH=Udiag(σ1,σ2,…,σM)WH
(5)
式中:∑=diag(σ1,σ2,…,σM)为对角矩阵;σj(j=1,2,…,M)为矩阵A的奇异值,且满足σ1≥σ2≥…σM>0;U和W为酉矩阵。
将奇异值分解的结果代入式(5)可以得到:

(6)
由于全息面实测复声压PH中通常包含误差,所以需要引入正则化限制测量误差的放大。引入正则化后,基于SONAH的声压重建公式为

(7)
式中:rs为声源点到全息面间任意方向任意长度的距离,m;fM为正则化滤波系数。本文中fM的正则化参数λ由GCV方法确定。
3 簇绒地毯织机噪声源识别
3.1 识别流程图
簇绒地毯织机的识别流程如图3所示。首先对采集的簇绒地毯织机噪声源进行预处理,随后进行基于SONAH算法和Hald经验公式的整体噪声源特征分析。当整体定位出现偏差时,采用Tikhonov正则化方法解决重建过程中存在的不适定问题,同时选取GCV最优正则化系数,进行局部区域特征分析,最后结合主轴振动频谱图进行准确定位。
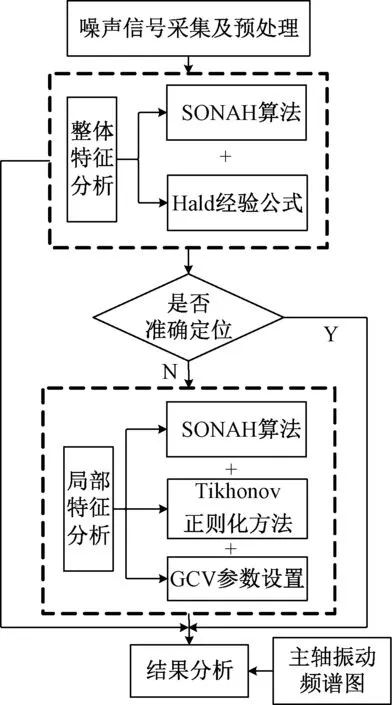
图3 识别流程图Fig.3 Identification flow chart
3.2 噪声信号采集及预处理
本文测试对象为幅宽4 m的簇绒地毯织机,主轴转速为350 r/min。采用16通道BK4961型传声器阵列,结合DH5922型动态信号测试分析系统和DHDAS型动态信号采集分析系统采集噪声信号。采样频率设置为51 200 Hz,采样时间为5 s。依照近场声全息技术对测量距离的范围规定,将平面声阵列上的传感器检测点距离机器表面的距离设置为0.25 m。簇绒地毯织机主视方向实验现场布置如图4所示。
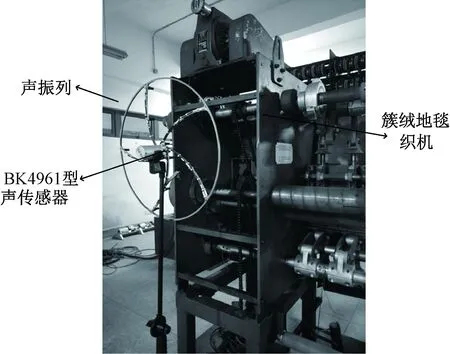
图4 主视方向现场布置图Fig.4 Site layout of main view direction
测量5组不同机位数据,并对主视方向采集的信号数据进行分析,得到的主视方向信号时频图如图5所示。
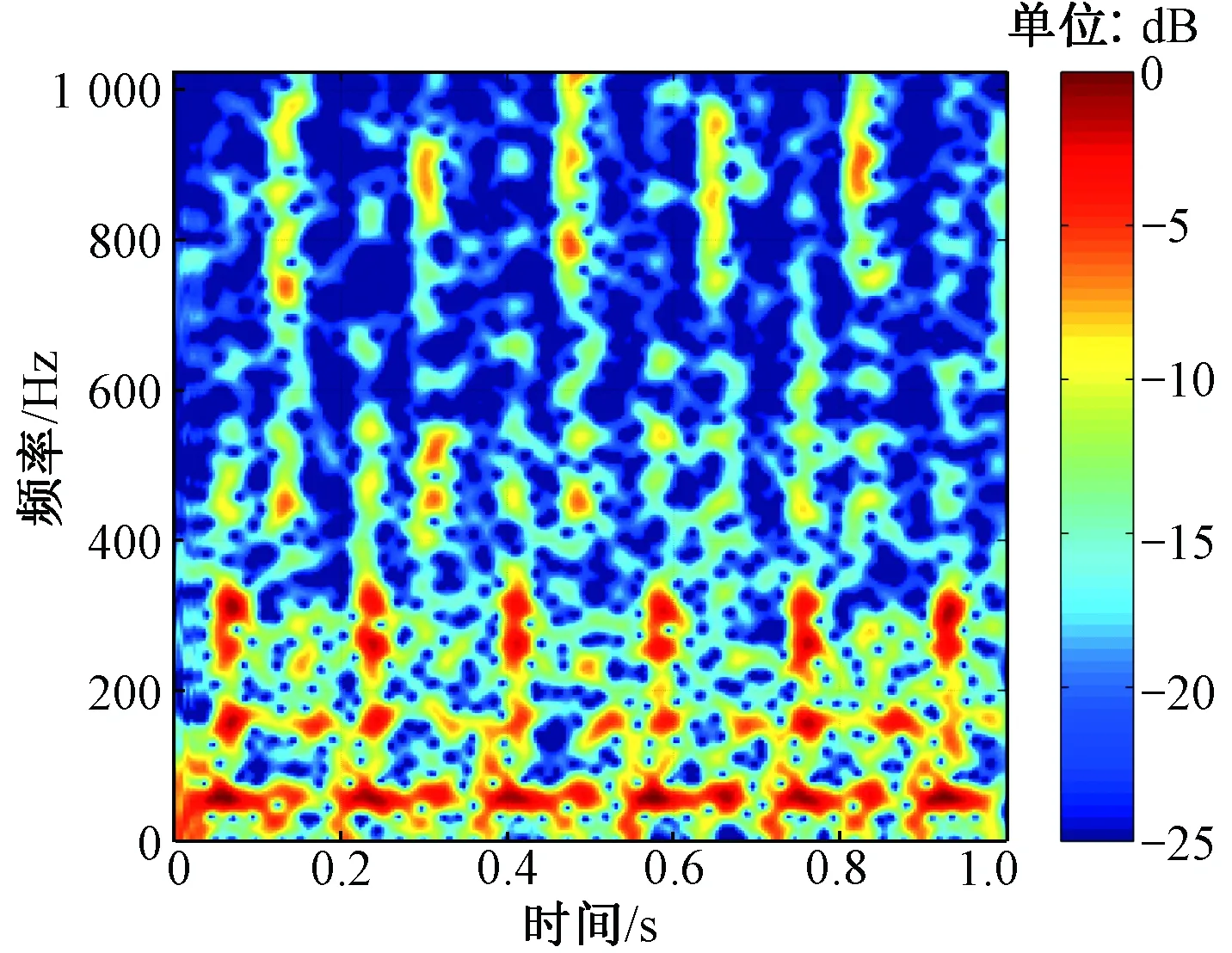
图5 噪声信号预处理时频图Fig.5 Spectrogram of noise signal pretreatment
由图5可以看出:信号中冲击特征明显,噪声源不止一个;120 Hz频率段以下为时不变稳定信号,且信号混叠现象严重;120~600 Hz频率段信号成分较为复杂,可分辨出其1 s内大概5 次的频率变化,与电动机主轴转动周期一致。
3.3 整体特征分析
由经验可知,织机在350 r/min工况下,实测电动机转动频率为5.8 Hz。选取350 Hz以下低频噪声作为研究对象,可获得如图6所示的基于Hald经验公式的0~350 Hz声学成像云图。该声学成像由图4所示声阵列所在织机主视图方向位置测量后重建得出。x、y分别为声振列的横向和纵向。

图6 0~350 Hz声学成像图Fig.6 Acoustic imaging figure of 0-350 Hz
由图6可知:在显示范围内出现多个声学中心;对比现场图4可得,电动机与主轴上的曲柄机构处声辐射方向一致;右上方凸轮处、辅助电动机下方和针排位置处产生独立峰值。
由此可以看出,声学中心并未准确对应织机噪声发声区域,这是因为簇绒地毯织机结构复杂,发声机构之间相互干扰,而基于Hald经验公式的参数确定方法忽略了全息测量面所测得的声压误差,进而影响声源的分离和准确定位,因此,需利用Tikhonov正则化方法解决重建过程中由于测量误差引起的不适定问题,获得方程真实解;采用广义交叉验证法选取最优正则化参数,以减少误差效应对于声源准确定位的影响。
3.4 局部特征分析
为对簇绒地毯织机局部区域进行精确分析和定位,根据SONAH算法对测量距离的规定,调整声振列与织机之间的间距。
选取最小G(λ)值,返回对应的正则化系数λ,可得到λ值为1.08×10-4。代入实际测量声压进行织机局部区域噪声源识别,结果如图7所示。

注:右侧声强的单位为dB。图7 织机不同区域的SONAH声学成像图Fig. 7 Acoustic imaging figures of different loom regions based on SONAH. (a) Motor and auxiliary motor system; (b) Needle row and hook shaft mechanism; (c) Spindle cam mechanism; (d) Cam mechanism
考虑到簇绒地毯织机中电动机主轴与其他相关机构的耦合运动产生噪声,测量得到主轴振动信号频谱图如图8所示。
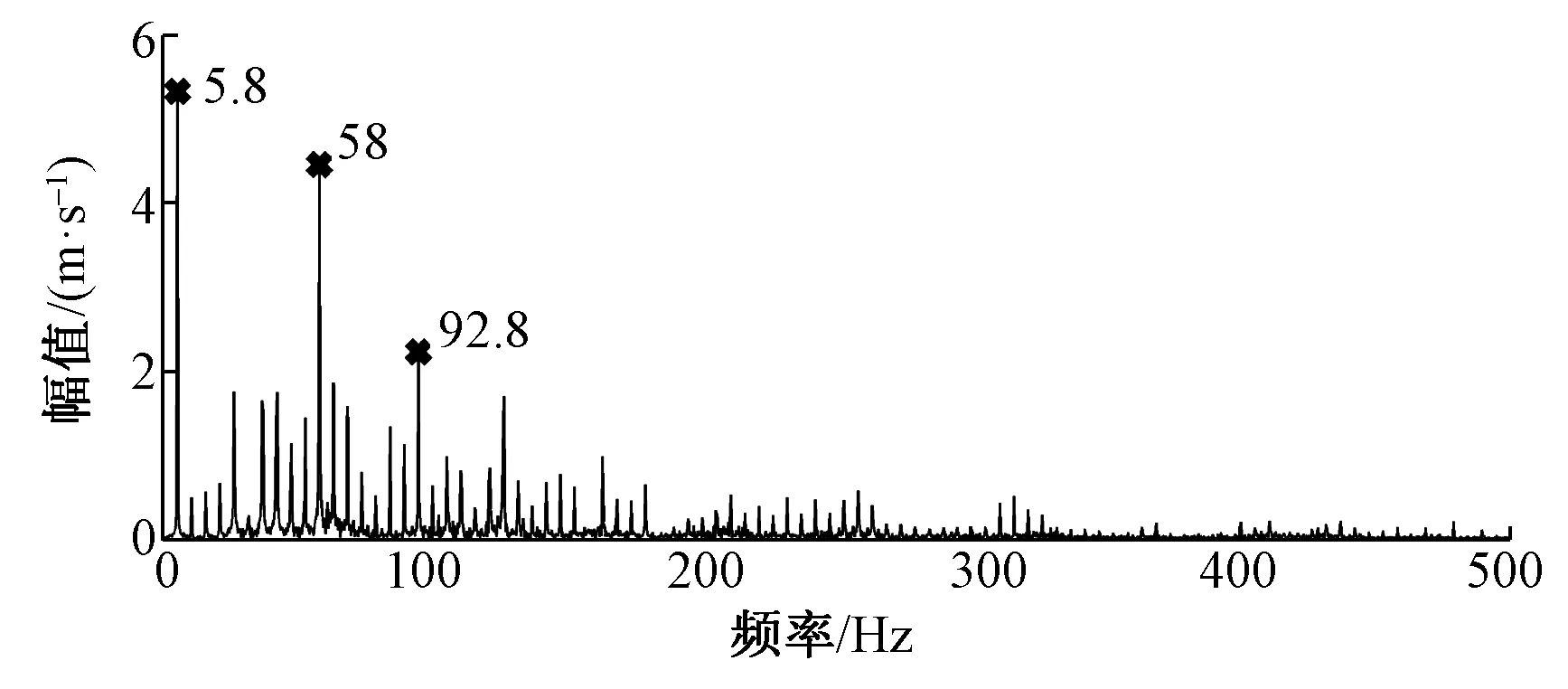
图8 主轴振动频谱图Fig.8 Frequency spectrum of spindle vibration
分析图8可知:主轴振动频率在0~60 Hz范围内包含2个主要峰值,分别为1倍和10倍基频(5.8和58 Hz);在60~120 Hz范围内包含1个主要峰值,即16倍频(92.8 Hz)。由于本文是在实际工作环境下采集声压信号,所以频响范围内所有频率成分数据叠加在一起,经过快速离散傅氏变换,可分解得到小分辨率的频率成分,包含基频和倍频。
结合图6、8,可准确地识别出图7中各声学成像中心对应的发声机构。将0~600 Hz噪声信号划分为4个频率段,如表1所示。不同频段内出现的峰值中心可准确定位在簇绒地毯织机对应的发声机构上。噪声采集环境造成部分重建误差,并不影响实验结果。

表1 发声机构分频段对应定位表Tab.1 Corresponding positioning table for frequencydivision segment of sound generator
4 能量贡献率分析
为确定簇绒地毯织机主要发声机构能量占比,将实际测量得到的噪声信号进行小波变换,由多分辨率分解原理,采用归一化能量分布法,将噪声信号进行m层分解,最大尺度逼近信号分量能量占比为
(8)
式中:Ea为簇绒地毯织机噪声信号在低频部分的能量;Et为总能量;Am为第m层近似信号;Di为第i层逼近信号。
簇绒地毯织机噪声信号各细节信号分量能量占比为
(9)
式中,Edi为簇绒地毯织机噪声信号在各高频部分的能量。
由归一化能量分步法计算结果可得:簇绒地毯织机噪声能量主要集中在0~60 Hz和60~120 Hz这2个频段中。其中电动机与辅助电动机的能量贡献率最大,达到47%;其次为针排机构,声贡献率为38%,这2个分量总共占噪声总能量的85%,是最主要的噪声来源,对纺织工人的影响也是最大的。而主轴曲柄机构和凸轮机构的能量贡献率分别为10%和5%,对织机整体噪声能量的贡献率较小。
5 结 论
本文基于SONAH算法,结合簇绒地毯织机结构特点和相关噪声分析,对织机在正常工作状态下的低频段0~350 Hz声场数据进行识别定位,得出如下结论。
1)结合Hald经验公式的SONAH算法可识别织机主要发声位置,但有偏差。这是由于簇绒地毯织机结构复杂,声源之间相互干扰,而基于Hald经验公式的参数确定方法忽略了全息测量面所测得声压误差,且该误差在计算过程中被放大,进而影响声源的分离和准确定位。
2)引入Tikhonov正则化方法解决重建过程中由于测量误差引起的的不适定问题,同时采用广义交叉验证法选取最优正则化系数。综合实际观测结果,可判定簇绒地毯织机的主要噪声源有:电动机的转动噪声、主轴曲柄的共振噪声、簇绒针刺穿基布的摩擦噪声,以及凸轮的振动噪声。
3) 综合归一化能量分布法可得,4处发声位置的噪声声强均超过生产车间的噪声限值85 dB,并且电动机与针排机构这2处噪声源占据最主要能量比例,因此,对电动机等部件进行低噪声改进是改善织机噪声辐射的一个有效途径。
