基于布谷鸟算法的无人机不规则作业区域的航迹规划研究
2019-04-23,,
, ,
(深圳供电局有限公司,深圳 518000)
0 引言
随着计算控制技术、信息技术以及图像处理技术的快速发展,无人机(Unmanned Air Vehicle,UAV)被广泛地用于地质测绘、巡线、智能安防以及植物保护等领域[1-2],无人机实物图如图1所示。

图1 无人机实物图
无人机航迹规划是指在综合考虑多影响因素的环境下,为满足实际需要而规划出的最优飞行轨迹路线[3]。无人机在执行任务之前,首先离线规划出参考航迹,之后随着飞行,结合实际探测信息和周围环境,根据需要,快速规划出新的飞行航迹。传统的UAV航迹规划方法存在实时性差、路线容易偏离等缺点,本文以UAV的不规则航迹规划为研究对象,建立基于布谷鸟算法的无人机不规则作业区域航迹规划研究,实现UAV航迹的实时规划和威胁目标的规避,效果较好。
1 布谷鸟算法
布谷鸟算法[4](Cuckoo Search Algorithm,CSA)是受布谷鸟种群寄宿繁殖行为启发而提出的一种新的群智能搜索算法。该算法假设如下:
(1)布谷鸟一次只下一个蛋,并且随机放在一个鸟巢中孵化;
(2)一部分布谷鸟的鸟巢存放优质蛋,存放优质蛋的布谷鸟鸟巢将被保存到下一代;
(3)布谷鸟蛋被寄主鸟发现,其将丢弃鸟巢或鸟蛋,寻找新的布谷鸟鸟巢,避免影响优化解的寻找。

⊕L(λ)(i=1,2,…,n)
(1)
其中,∂表示步长控制量;xb表示布谷鸟的当前最优位置;⊕表示点对点乘法;L(λ)表示布谷鸟的随机搜索路径,其服从Levy概率分布[5-6]如式(2)。
Levy~u=t-λ1<λ≤3
(2)
2 无人机航迹规划数学模型
2.1 目标函数
在多约束条件下,为保证无人机航迹规划路径最短,本文选择适应度函数式(3)作为目标函数[7]。
Fitness(xi)=q1·f_apag(xi)+q2·f_plag(xi)+
q3·f_Rsw(xi)+q4·f_L(xi)+
q5·f_height(xi)+q6·f_close(xi)
(3)
其中,q1、q2、q3、q4、q5和q6分别表示垂直方向转弯角、水平方向转弯角、转弯半径、飞行距离、飞行高度和航向的权值系数。
2.2 约束条件
(1)UAV在垂直方向上的最大转弯角约束条件[7]如式(4)。
(4)
其中,θmax表示UAV在垂直方向上的最大转弯角度,转弯角度示意图如图2所示。

图2 UAV转弯角度示意图
(2)UAV在水平方向上的最大转弯角约束条件[7]如式(5)。
(5)
其中,φmax表示UAV在水平方向上的最大转弯角度。
(3)UAV的最小转弯半径约束条件[8],如式(6)。
(6)
其中,Rsw、Rmin分别表示UAV的转弯半径和其固有的最小转弯半径。
(4)UAV飞行距离约束条件[8-9]:为保证UAV完成任务和返航,UAV飞行距离应限制在一个最远距离Lmax内,如式(7)。
(7)

(5)UAV最低飞行高度约束条件[8-10]:无人机安全飞行的所保证的最低飞行高度Hmin。由UAV高度示意图(图3)可知式(8)。
(8)
其中,hk表示UAV的当前飞行高度;Hmax和Hmin分别表示UAV的最大和最小飞行高度,如图3所示。

图3 UAV航迹高度示意图
(6)UAV航向约束条件[8-10]:UAV航迹规划时,其每迭代计算一步应不断逼近目标点,因此航向应满足式(9)。
(9)
其中,li表示目标点G和待选航迹节点C的距离,l表示目标点G和当前航迹节点B之间的距离。其示意图如4所示。

图4 UAV航向关系示意图
3 基于CSA的无人机航迹规划
UAV在执行飞行任务之前,先通过离线规划出无人机一条最优飞行路线。当无人机执行任务的时候,无人机将根据自身侦测设备和控制中心所接收到的环境探测信息,无人机进行信息评估,根据信息评估结果作出决策是否避开危险目标,从而规划出一条新的航迹路线[11]。基于CSA的无人机航迹规划流程图如图5所示,其算法流程如下:
Step1:建立无人机航迹规划数学空间模型和威胁目标位置信息[12];
Step2:初始化CSA算法参数:CSA算法的种群大小为size,迭代次数为N,最大最小步长分别为∂max,∂min;

Step 4:根据公式(1)和公式(2)计算Levy飞行步长,并更新其他布谷鸟鸟巢的位置,获取新的布谷鸟鸟巢位置,并计算新的布谷鸟鸟巢位置的适应度Fitness;

Step 6:若gen>N,保存最优解;反之gen=gen+1,转到Step3;
基于上述算法流程,CSA算法能够找到UAV航迹规划路径的一条最优航迹,如图5所示。
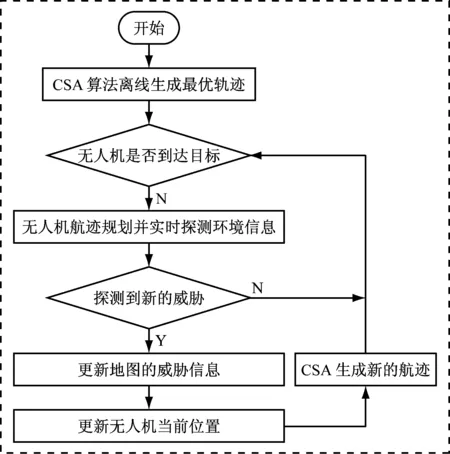
图5 基于CSA算法的UAV航迹规划流程图
4 仿真试验
为了验证本文算法的有效性和可靠性,假设UAV在飞行50 km之后在其飞行空间内发现一中心坐标(60,60,0),防空导弹阵地的作战半径为10 km,无人机的最大规划时间tmax=15 s,UAV当前飞行速度为V飞,开始重新规划航迹,最大规划时间tmax之后,UAV开始重新规划航迹,目标函数的约束权值系数分别为q1=0.1,q2=0.1,q3=q4=q5=q6=0.2。UAV初始规划和发现威胁的空间三维图分别如图6和图7所示。

图6 初始规划空间

图7 发现威胁的规划空间
UAV发现威胁之后,受攻击之前,其正好经过参考航迹空间,因此需进行航迹重新规划。假设无人机的出发位置坐标为(0,0,0),目标位置坐标为(100,100,0),其离线规划的参考航迹和重新规划航迹分别如图8和图9所示。

图8 参考航迹

图9 重新规划航迹
图8和图9中红色曲线表示UAV离线规划的参考航迹,蓝色曲线表示CSA重新规划出的飞行航迹。当UAV探测到威胁目标位于参考航迹空间内时,UAV开始重新规划航迹,避开威胁目标,在飞行最大规划时间tmax,无人机将继续沿着离线规划的航迹路线飞行。CSA规避威胁目标重新规划航迹的时间为2.35 s,实时性较好,能够满足UAV的不规则作业区域的航迹规划需要。
为了进一步说明,CSA进行UAV航迹规划的实时性和可靠性,假设无人机的出发位置坐标为(5,5,0),目标位置坐标为(95,95,0),其离线规划的参考航迹和重新规划航迹分别如图10和图11所示。

图10 参考航迹
通过图10和图11可知,通过更换目标位置和出发位置,CSA算法进行航迹规划,可以有效避开威胁目标,规划出新的航迹,规划时间仅1.91 s,实时性好,满足航迹规划的实时性要求,可以推广应用。

图11 重新规划航迹
5 总结
针对传统的UAV航迹规划方法存在实时性差、路线容易偏离等缺点,以UAV的不规则航迹规划为研究对象,在保证无人机航迹规划路径最短的情况下,综合考虑垂直方向转弯角、水平方向转弯角、转弯半径、飞行距离、飞行高度和航向等约束条件,提出一种基于布谷鸟算法的无人机不规则作业区域航迹规划方法。仿真试验结果表明,提出的算法可以有效规避威胁目标,并重新规划出航迹路线,具有很好的实时性,能够满足实际路线规划要。
