基于人工倾斜摄影测量的微地形三维建模方法研究
2019-04-19刘金龙周阳阳吴海晶张青峰
刘金龙,周阳阳,吴海晶,张青峰
(西北农林科技大学 资源环境学院,陕西 杨凌712100)
微地形的空间复杂性和不确定性决定了其测量方法的多样性。目前,微地形测量的主要方法有接触式(如测针法、链条法)和非接触式(如激光扫描法、近景摄影测量法)两大类[10-11]。接触式测量方法可能会对地表造成破坏,从而影响测量结果。非接触式测量方法虽能改善这个问题,但激光扫描法和近景摄影测量法受测量角度的限制,存在一定的盲区,不能真实完整地反映微地形特征。倾斜摄影测量(TPM, Tilt Photo-graphy Measurement)是采用光学摄影的方式,采集影像并完成对被摄物体信息(包括大小、形状、特性、位置等方面的信息)的获取,实现对真实场景的重建[12],然而该技术目前主要用于对较大范围地物的观测[13-15],鲜有应用于微地形观测的报道,且在面积较小的情况下,如何采用人工方式进行观测以节约成本,仍需要深入进行研究。为此,本研究在黄土坡面微地形条件下采用人工方式应用ATPM技术进行了探索性研究。
1 试验设计
本试验在陕西省杨凌区一块平坦的农耕地上进行。杨凌区位于黄土高原南缘(E108.72°、N34.36°),属温带半湿润大陆性季风气候区,年均降水量约637.6 mm。坡耕地土壤为灰棕色塿土,土体较疏松,土壤颗粒以粉砂为主(砂粒占2.82%、粉粒占55.74%、黏粒占41.44%),容重为1.30 g/cm3,含水率为10%。
试验选用3种规格的铁皮框,分别为30 cm×30 cm×10 cm(长×宽×高)、60 cm×60 cm×10 cm、100 cm×100 cm×10 cm。将铁皮框轻嵌入地表并使其保持水平,同时地表凸起部分不得高于铁皮框顶部。4个角点作为控制点,其中左下角点定义为坐标原点,原点与相邻的控制点所在的边框分别定义为x、y轴,并在铁皮框内的试验区S形选择7个样点作为标注点,如图1所示。

图1 试验区示意

2 研究方法
2.1 相机检校
普通数码相机是非量测相机,由于内方位元素未知,不够稳定或不能重复拨定,或时有变化,因而不能进行像位的解析计算,需要对相机内参数进行检校,即求解相机内方位元素(主距与像主点位置) 与多种畸变参数。因此,将数码相机应用于摄影测量时需进行相机检校[16]。检校参数见表1。
像点最大畸变在限值范围内,故本相机完全满足影像获取的精度和可靠性要求。

表1 尼康D90数码相机检校参数
2.2 微地形三维模型构建
利用Smart3DCapture4.0软件分别对试验获取的地表影像进行处理,最终完成微地形三维模型的构建。具体技术流程为:①通过空中三角测量计算,对原始影像进行特征提取,即对影像中同名点的图像信息进行不同角度的匹配,以确定不同影像之间的关系,并获得一个粗糙的三维地表模型;②通过设置比例因子,将①中解算出的控制点间距修改为实际距离(单位设置为cm),得到与实际地表比例一致但缺少统一坐标系的立体模型;③导入控制点坐标,添加三维坐标轴,在模型上刺点(人工修正导入控制点位置),确保模型上控制点与导入的控制点位置一致;④再次进行空三加密解算(即根据若干均匀分布于区域内的控制点,运用立体测图技术,计算得到匹配加密点的高程和平面位置[17]),得到统一坐标系下1∶1高精度微地形三维模型,同时包含纹理、点云数据、正射影像和数字地形模型。
又听到了吸鼻子和咳嗽的声音,离他不到二十尺远的两块岩石之间,他隐约看到一只灰狼的头。那双尖耳朵并不像别的狼那样竖得笔挺;它的眼睛昏暗无光,布满血丝;脑袋好像无力地、苦恼地耷拉着。这个畜生不断地在太阳光里霎眼。正当他瞧着它的时候,它又发出了吸鼻子和咳嗽的声音。
2.3 精度评价
通过对标注点实测坐标值与其解算坐标值进行比较,评价标注点坐标(x,y,z)的精度,进而完成对模型的精度评价;由数字地面模型和正射影像计算得到试验区表面体积,与实测表面体积数据进行对比分析,以对整个微地形模型进行高程精度评价。
用中误差来衡量观测精度的高低,它是观测值与真值偏差的平方和观测次数n比值的平方根。中误差越小,表示测量精度越高。
3 结果分析
3.1 控制点可靠性分析与微地形三维模型
空三加密中通过加入控制点坐标进行二次运算,可达到更正模型所有点坐标的目的。由于过程中包含平差运算,因此空三加密完成后控制点坐标也会发生改变,而控制点坐标的可靠性是定量描述微地形模型的前提,所以有必要分析控制点的可靠性。每种规格微地形单次试验4个控制点,3种规格各重复3次,共计36个控制点的坐标数据。经统计分析,x、y、z坐标的误差分别为-0.14、0.05、-0.12 mm,这说明控制点的相对位置基本上保持不变。控制点坐标的稳定保证了坐标轴的可靠性,为空间各点的三维坐标的准确性提供了先决条件。以100 cm×100 cm试验区为例,所生成的1∶1微地形三维模型纹理、点云数据、正射影像和数字地形模型见图2。可以看出,试验区微地形模型中空间各点的位置完全符合自然状态下的地表特征,且具有明显的地表细微特征。
3.2 微地形三维模型精度评价
微地形模型精度评价包括平面精度评价和高程精度评价两个方面。
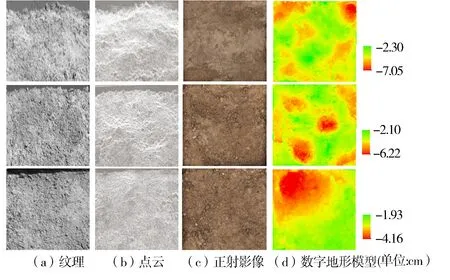
图2 试验成果(100 cm×100 cm试验区1∶1微地形三维模型)
3.2.1 平面精度评价
标注点的实测平面坐标与解算平面坐标及其统计数据见表2。
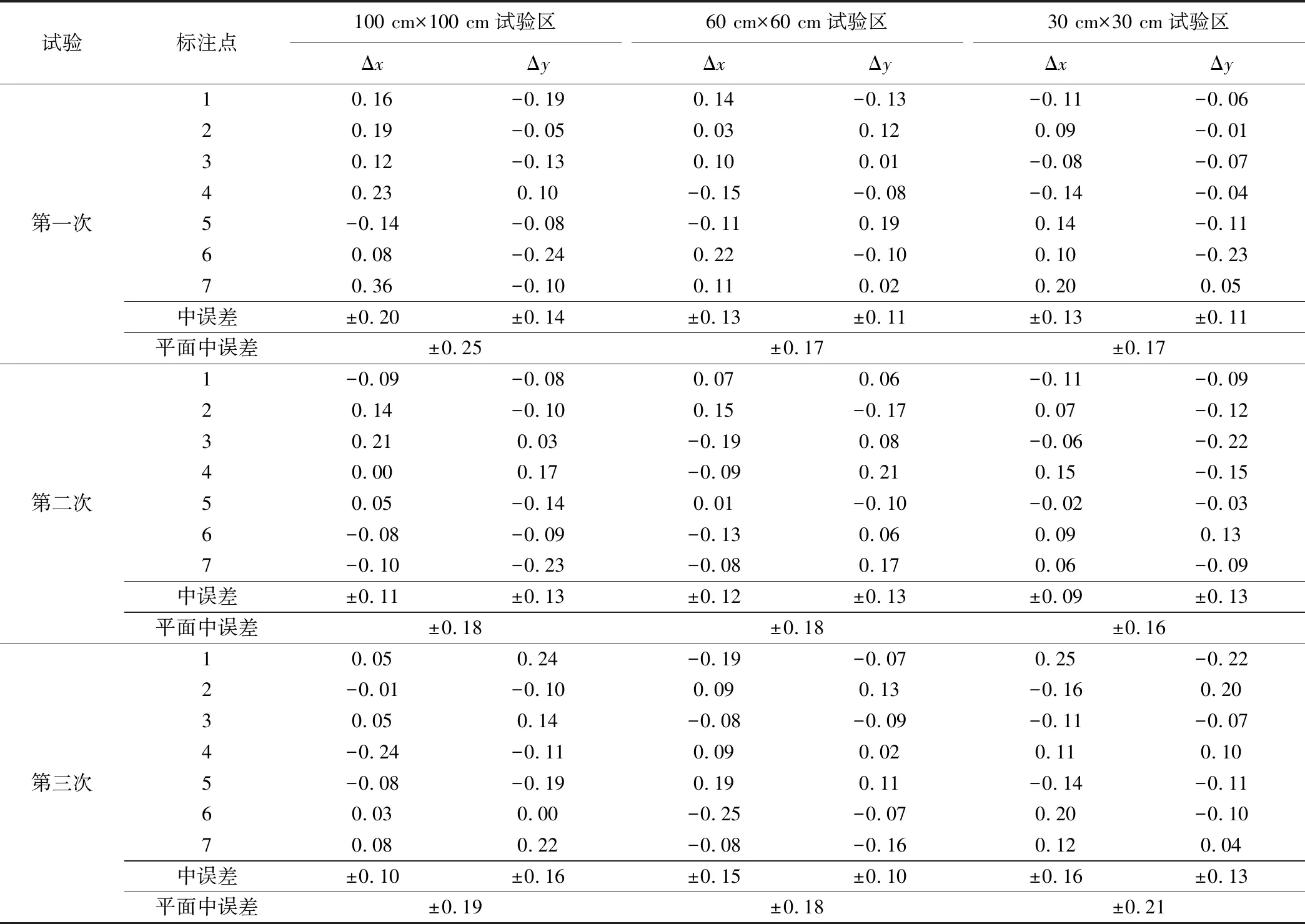
表2 标注点平面坐标对比 cm
注:Δx、Δy表示实测坐标与解算坐标的差值。
由表2可知,3个不同规格试验区微地形三维模型的x、y方向上中误差分别为±0.9~±2.0 mm和±1.0~±1.6 mm,平面中误差在±1.6~±2.5 mm之间。将3次试验数据统一进行分析,则x、y方向上中误差分别为±1.4 mm和±1.3 mm,平面中误差为±1.9 mm,达到了毫米级的精度。
3.2.2 高程精度评价
在土壤侵蚀的判定中, 对高程的测量精度要求高于平面精度。基于这一事实,本研究中对模型高程精度的评价,除了标注点高程精度评价,还根据微地形表面体积与面积的转化公式求得相应的z值,以说明所有点高程的总体精度情况。实测表面体积可通过水体质量密度公式计算而得,模型表面体积可利用ArcGIS软件中的ArcTools工具计算。
微地形表面以上z=0平面以下实测与解算体积及标注点高程统计数据见表3。
由表3可知,三种不同规格的微地形中,标注点的高程中误差分别为±1.4~±3.2、±2.1~±3.3、±1.6~±3.2 mm,总体中误差为±2.6 mm。根据实测表面体积与测算表面体积计算求得不同规格微地形高程,整体对比来看,二者高程误差介于0.4~3.0 mm;且微地形表面以上z=0平面以下实测体积均略高于解算体积,这可能与水体压实地表有一定的关系。
综合来看,微地形三维模型的坐标可达到毫米级精度。基于人工倾斜摄影测量技术获取黄土坡面微地形三维数值模型是可行的。本研究得到的1∶1微地形三维数值模型见图3。
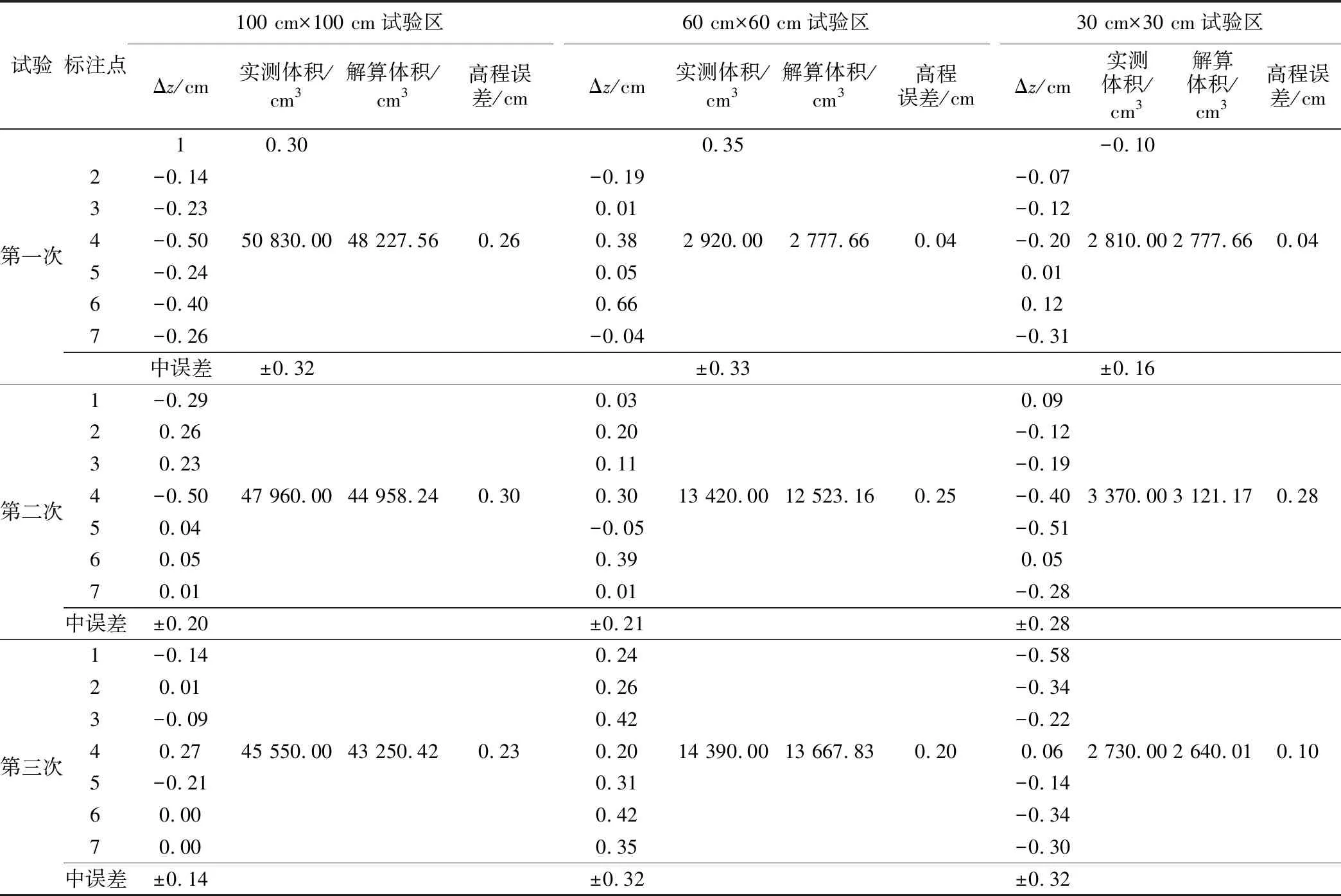
表3 高程精度评价
注:电子秤测量水体质量精度为10 g,故体积精度为10 cm3。以30 cm×30 cm试验区为例,地表点高程精度为10/(30×30)=0.01 cm=0.1 mm。Δz表示实测坐标与解算坐标的差值。
4 结论与讨论
本研究采用人工倾斜摄影测量方法获取黄土坡面微地形高精度三维数值模型,通过标注点实测坐标数据与解算坐标数据之间的精度评价,以及实测表面体积与解算表面体积计算高程值之间的差异分析,综合评价了三维模型的平面精度与高程精度。研究表明,采用人工倾斜摄影测量获取微地形三维数值模型的方法是科学可行的,所获得的1∶1微地形三维数值模型能很好地反映坡面的实际情况,达到了毫米级精度,可用于微地形的测量与大比例尺数字地图的生产。
尽管我国目前已制定了国家测绘标准《1∶500、1∶1 000、1∶2 000 地形图航空摄影测量内业规范》(GB/T 7930—2008),但随着生产实践对测量精准化要求的不断提高,大于1∶500比例尺的地图生产也势在必行。根据本研究的成果,1∶1比例尺微地形平面中误差应不超过±2.5 mm,高程中误差应不超过±3.3 mm,可作为1∶1大比例尺精度的要求。然而本研究只是用了固定分辨率、固定拍摄距离和拍摄方式来获取地表影像,关于选用不同分辨率的数码相机或采取不同的拍摄距离或改变拍摄方式会对生成的三维数值模型精度有何影响,仍有待于深入探讨与研究。

(a)100 cm×100 cm
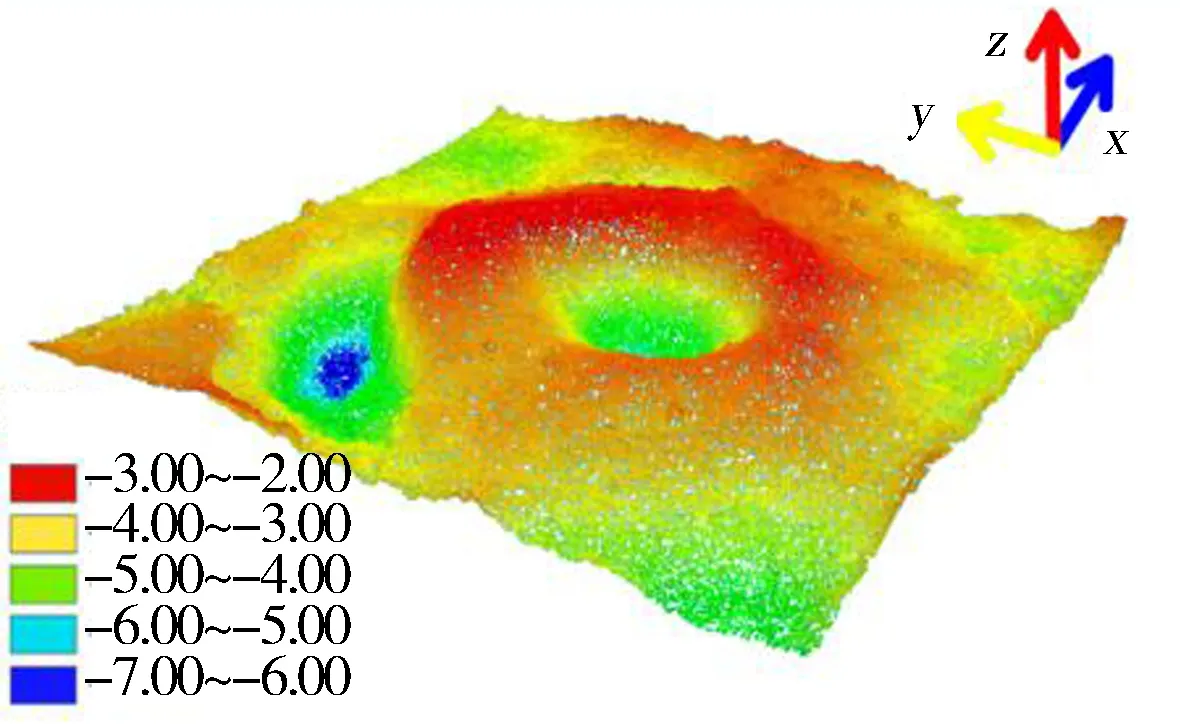
(b)60 cm×60 cm
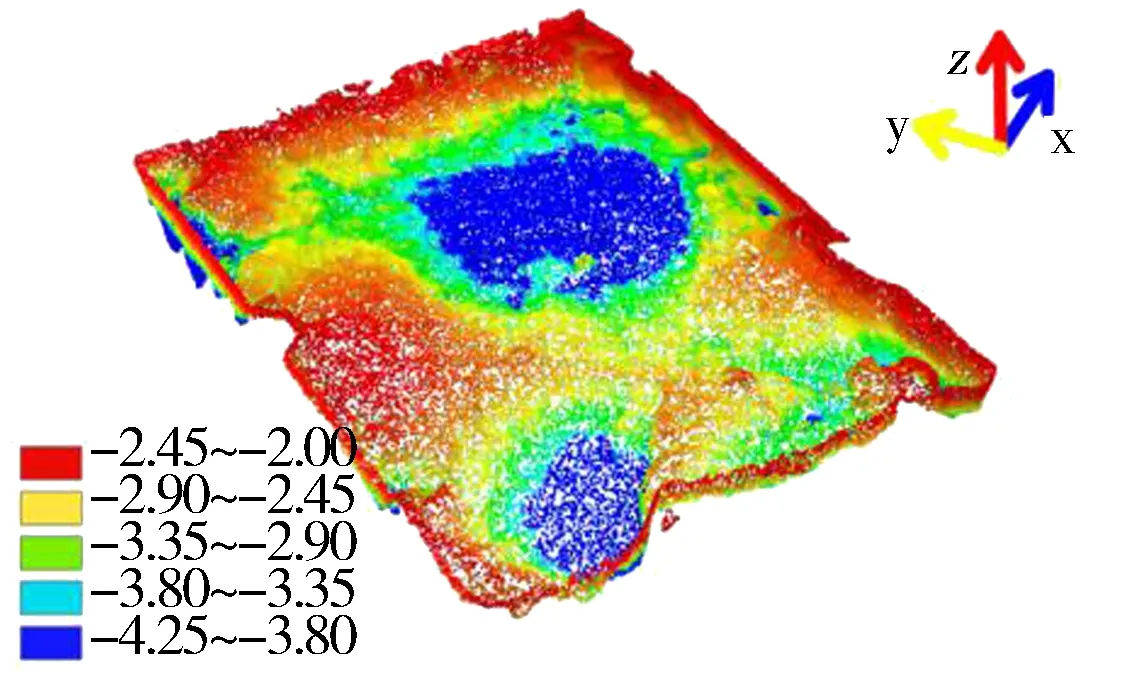
(c)30 cm×30 cm
由于本研究采用了人工替代无人机的方式,可以快速采集地表的影像数据,实现接近真实的1∶1大比例尺三维模型,节省了购买无人机的费用且无需考虑其续航时间问题,极大地减少了三维建模的成本,因此在微地形条件下的三维建模及地物变化(变形)监测方面具有广泛的应用前景。
(致谢:感谢学习室各位同门在本文撰写过程中予以的大量帮助,也感谢各位舍友在试验中的鼎力相助。)
