基于转向中心前后位置控制的多轴汽车操纵稳定性研究
2019-04-18李运洪朱永强
李运洪,朱永强
基于转向中心前后位置控制的多轴汽车操纵稳定性研究
李运洪,朱永强
(青岛理工大学机械与汽车工程学院,山东 青岛 266520)
为解决多轴汽车高速行驶转向操纵稳定性差的问题,建立了五轴全轮转向汽车的ADAMS-Simulink联合仿真平台,在50-130(km/h)车速范围内,进行了基于D值(汽车转向中心与第1轴的距离)的两种转向试验对比分析:固定D值(Fixed D value,FD)和可变D值的角阶跃输入响应试验。仿真结果表明:采用基于D值的横摆角速度PID控制策略(PID-D)能显著改善多轴汽车的操纵稳定性,车速为100km/h时,在横摆角速度稳态值基本不变的情况下,超调量降低0.08%,收敛时间降低20.4%;质心侧向加速度稳态值降低0.14%;质心侧偏角稳态值降低17.8%,更接近零值。
多轴汽车;转向中心位置控制;后轴主动转向;PID-D控制策略;联合仿真
前言
多轴汽车在长距离和大吨位的汽车运输中承担着重要的角色,但由于整车尺寸大、重心高,因此在高速行驶拐弯时,极易引发侧翻、甩尾等危险工况,极大地影响着公路的运输安全性。因此非常有必要针对这一工况进行研究,提高多轴汽车的高速行驶安全性。
目前国内外对多轴汽车转向的研究主要集中在以下几方面:(1)基于时间跨度的控制策略:Kharrazi等人利用改善侧偏特性的控制器,控制被牵引单元的轴,调节驾驶员转向和牵引单元处轮胎侧向力产生的时间跨度,来改善横摆角速度的响应性能和偏离跟踪性[1]。(2)全轮驱动-多轴转向技术:10×10全轮驱动的太拖拉凤凰欧6重型自卸车采用第一、二、五轴转向的功能,来改善转向稳定性[2]。(3)直接横摆力矩控制策略:刘永腾针对多轴电驱动车辆,设计了模糊-直接横摆力矩控制策略,实现了横摆角速度和质心侧偏角的双目标控制[3]。(4)主动转向控制策略:方凌霄建立了线性二自由度车辆动力学模型,进行了后轮比例控制、横摆角速度反馈四轮比例控制等四种主动转向控制系统对比分析,并得出结论:以零质心侧偏角为控制目标的四轮转向控制策略能改善操纵稳定性[4]。但以上研究没有分析转向过程中,后轮动态转向对汽车操纵稳定性的影响。
研究表明:多轴汽车采用同相位转向(前、后轴车轮转向方向相同),会减小高速行驶转向的横摆角速度,有助于避免汽车甩尾失稳[5]。但由此会导致多轴汽车行驶轨迹发生改变,驾驶员为完成预定轨迹的行驶要求,需要额外的调节方向盘,从而会增加驾驶员的操作强度,并且也会导致驾驶感受不同,需要驾驶员进行适应。因此迫切需要提出一种新的控制策略:在不改变汽车行驶轨迹的前提下,降低横摆角速度的超调量、缩短收敛时间。
由于多轴汽车后轴到质心的距离较大,因此后轮转向时会对质心产生较大的转向力矩,从而对整车横摆角速度产生显著影响。基于此,本文提出:在转向过程中,通过动态改变转向中心到第一轴的距离来改善多轴汽车的操纵稳定性。
1 基于转向中心到第一轴距离的转向控制理论
为了便于研究,将全轮转向五轴汽车简化为线性二自由度(侧向运动和横摆运动)模型,汽车质心为坐标系原点O,x轴平行于地面,指向汽车前进方向,z轴垂直于地面向上,y轴根据右手定则,指向左边[6],如图1所示。
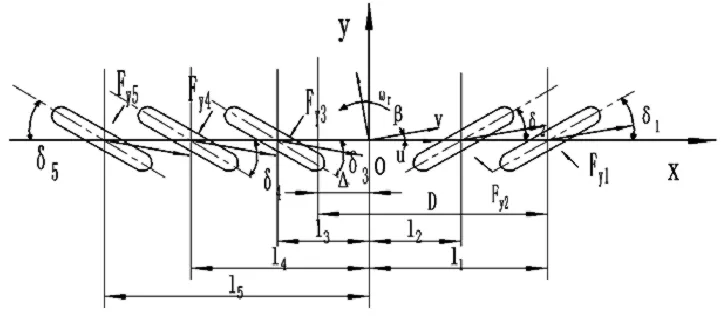
图1 五轴汽车全轮转向二自由度模型
对五轴汽车进行受力分析[7],定义转向中心前为正,否则为负,可得:

式中,δ为汽车第i轴车轮偏转角,单位rad,与第一轴转角方向相同为正,否则为负。
将式(1)整理,得到模型运动微分方程:
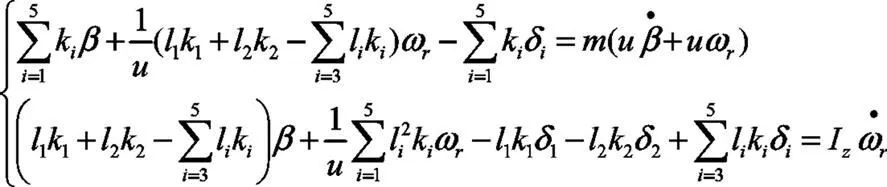
将上式改写成状态空间方程为:

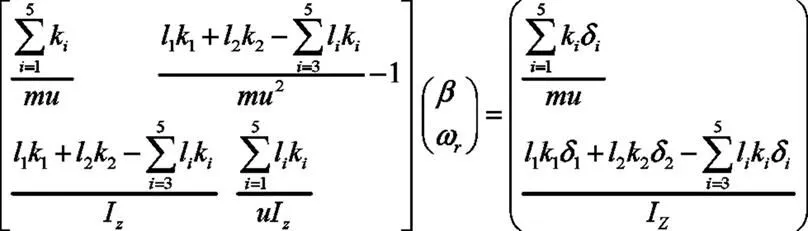
再由克莱姆法则计算得:

最佳的转向过程是要求所有的车轮都处于纯滚动而没有滑移状态,或者只有极小的滑移,因此要求全部车轮都绕一个瞬时转向中心做圆周运动,即符合阿克曼定理[9]。由多轴转向车辆的阿克曼定理[10]得:

式中,为汽车转向中心与第1轴的距离。
于是有:


整理可得,
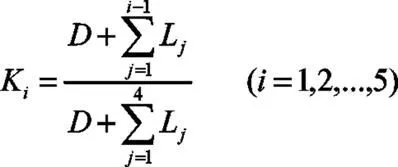
将比例系数为K带入式(5)得:

由以上公式推导可得:改变值会对操纵稳定性产生影响,即可以通过改变汽车转向中心前后的位置来改善汽车操纵稳定性。
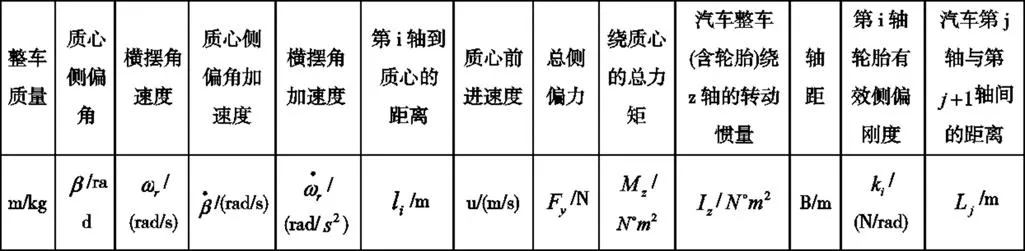
表1 五轴全轮转向汽车主要变量参数
基于此,本文提出基于的横摆角速度PID控制策略:当汽车转向时,根据汽车的转向盘转角和车速,计算出目标横摆角速度,作为PID控制目标,通过调整利值大小,实现对汽车横摆角速度的PID控制,如图2所示。
图2 控制系统仿真模型
2 整车建模与联合仿真实验
利用ADAMS/View建立五轴全轮转向全轮驱动的整车动力学模型,如图3所示。利用MATLAB/Simulink建立基于的后轴转向控制策略模型。图4为联合仿真控制框图。
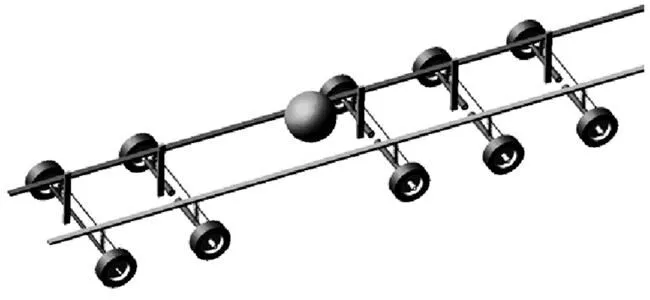
图3 五轴汽车模型

图4 ADAMS与Simulink的联合仿真控制框图
3 基于D的后轴转向控制策略的仿真结果分析
为验证本文提出的基于的多轴汽车操纵稳定性控制,利用前面所建立的联合仿真平台,分别进行了值固定(FD控制策略)和基于值进行横摆角速度PID控制(PID-D控制策略)的仿真对比试验。
该试验选取车速为[50,60,70,80,90,100,110,120,130](km/ h),仿真结果如图5-8所示。
(1)采用PID-D控制策略时,在同一车速下,汽车横摆角速度收敛时间相对于FD控制策略缩短,并且超调量变小,如图5所示,说明汽车操纵稳定性变好。
(2)在同一车速下,PID-D的质心侧向加速度稳态值的绝对值均小于FD的侧向加速度稳态值的绝对值,如图6所示,说明PID-D的侧翻的可能性小,汽车更安全。
(3)高速时,采用PID-D控制策略,质心侧偏角更接近零,说明轨迹跟踪性好。但在低速时,质心侧偏角较大,说明采用基于D的横摆角速度的策略,汽车机动灵活性变好。
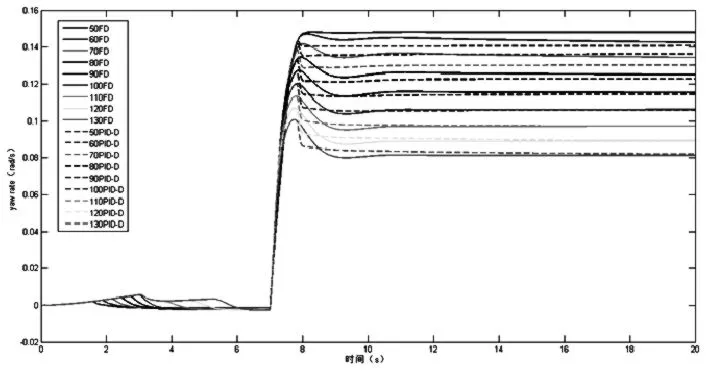
图5 不同速度下的横摆角速度阶跃响应比较
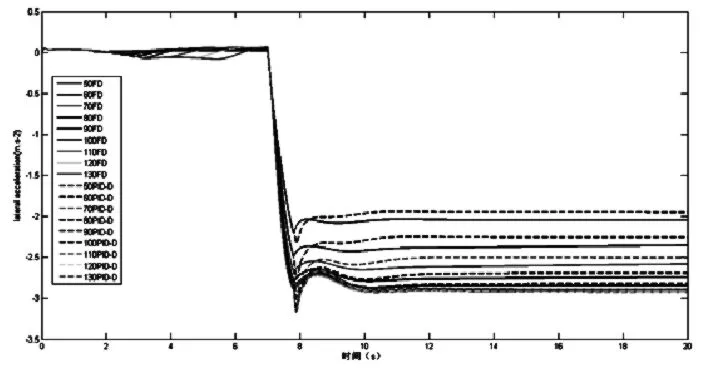
图6 不同速度下的侧向加速度阶跃响应比较
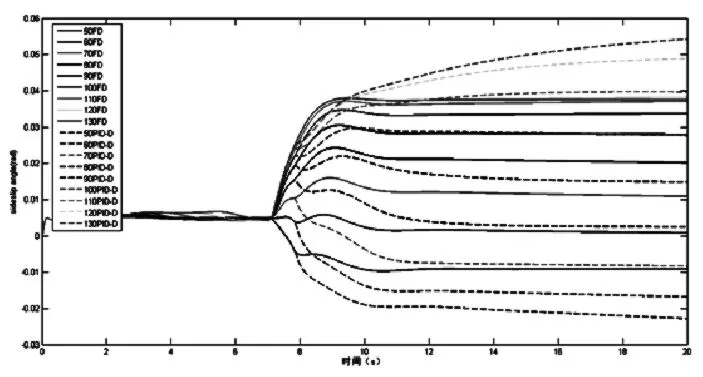
图7 不同速度下的质心侧偏角阶跃响应比较

图8 不同速度下的质心运动轨迹比较
随着车速提高,汽车的质心侧偏角的稳态值由负变正。特别车速在70-100km/h时,PID-D的质心侧偏角稳态值的绝对值均小于FD的侧偏角稳态值的绝对值,说明采用PID-D控制策略可以一定程度上缓解汽车侧向滑移的趋势,但此时曲线稳态前波动较大并且超调量较大,这个问题还需要进一步完善,如图7所示。
如图8所示为质心运动轨迹曲线,速度在50-70km/h时,FD和PID-D的质心运动曲线未完全重合,偏移距离依次为5.676m,5.268m,5.045m,随着车速增加,两者的质心轨迹曲线重合,说明高速时采用PID-D控制策略,汽车质心的行驶轨迹变化不大,这样不会增加驾驶员开车的难度。主要原因是,采用新的控制策略以后,汽车的稳态横摆角速率基本保持不变。
4 结论
针对多轴汽车高速转向操纵稳定性差的问题,在不同车速下,进行了FD和PID-D的对比仿真试验,发现多轴汽车以不同车速行驶转向时,动态改变D值会改善汽车的操纵稳定性:
(1)汽车在转向过程中,车速相同且PID-D和FD的横摆角速度达到相同稳态值的情况下,采用PID-D控制策略的横摆角速度的响应时间短、超调量较小;并且,质心侧向加速度稳态值的绝对值更小,说明此时汽车发生侧倾失稳的可能小。
(2)在适当的车速下,PID-D控制策略可以在一定程度上调节多轴汽车的质心侧偏角大小,保持良好的轨迹跟踪性。
(3)采用PID-D控制策,行驶轨迹基本不变,驾驶员不需要额外的转向操作,减少了驾驶员的转向工作量。
综上所述,采取PID-D(基于D的横摆角速度控制)策略能有效地改善多轴汽车转向操纵稳定性。
[1] Kharrazi S, Lidberg M, Roebuck R, et al. Implementation of Active Steering on Longer Combination Vehicles for Enhanced Lateral Per -formance[J]. Vehicle System Dynamics,2012.
[2] 高恩壮.三轴重型汽车转向特性及其控制方法研究[D].西安:长安大学,2017.
[3] 刘永腾.基于ADAMS和SIMULINK的多轴电动车建模与操纵稳定性研究[D].长春:吉林大学,2015.
[4] 方凌霄.主动转向控制策略及其改善转向响应机理的研究[D].长春:吉林大学,2018.
[5] 张平霞,高利,朱永强.多轴电动轮汽车双目标操纵稳定性优化分析[J].机械设计与制造,2014,(10):5-7.
[6] 鲍婕.某6×6车辆操纵稳定性研究[D].北京:北京理工大学,2015.
[7] 张俊友,王树凤,李华师.五轴重型全轮转向汽车操纵稳定性分析[J].农业机械学报,2008,(9):30-34.
[8] 于祥欢,孙大刚,何成林.九轴全地面起重机转向模式及其性能研究[J].太原科技大学学报,2017,38(4):283-288.
[9] 张平霞,高利,朱永强.五轴汽车同相位程度对转向性能的影响分析[J].系统仿真学报,2015,(3):627-633.
[10] Pingxia Zhang,Li Gao,Yongqiang Zhu.Study on control schemes of flexible steering system of a multi-axle all-wheel-steering robot[J].. DOI:10.1177/1687814016651556.
Research on Steering Stability of Multi-Axle Vehicles Based on Front andRear Position Control of Steering Center
Li Yunhong, Zhu Yongqiang
(School of Mechanical and Automotive Engineering, Qingdao University of Technology, Shandong Qingdao 266520)
In view of the problem of poor steering stability of multi-axle vehicles at high speeds, a co-simulation platform for five-axle all-wheel steering vehicle was established using ADAMS-Simulink, doing a comparison analysis of two steering tests based on the D value (distance between the steering center of the vehicle and the first axle): angular step input response experiments of fixed D value and variable D value in the range of 50-130 (km/h) vehicle speeds. Simulation results show that the PID control strategy of yaw rate based on D-value(PID-D) can significantly improve the steering stability of multi-axle vehicles, when the vehicle speed is 100km/h, in the case where the steady state value of the yaw rate is substantially constant, the overshoot is reduced by 0.08% and the decrease of convergence time is 20.4%; the steady state value of the lateral acceleration is decreased by 0.14%; and the steady state value of the sideslip angle is decreased by 17.8%, closer to zero.
multi-axle vehicle; steering center position control; rear axle active steering; PID-D control strategy; co-simulation
U463.4
A
1671-7988(2019)07-50-04
李运洪(1994-),女,硕士研究生,就读于青岛理工大学机械与汽车工程学院,研究方向:车辆动力学。朱永强,(1975-),男,博士(后),青岛理工大学机械与汽车工程学院副教授,研究方向:车辆动力学、虚拟现实技术。
U463.4
A
1671-7988(2019)07-50-04
10.16638/j.cnki.1671-7988.2019.07.017
