基于小波神经网络PID的战车自适应巡航算法
2019-04-11王立珂
贾 智,赵 岩,张 兵,王立珂
(北方自动控制技术研究所, 太原 030012)
无人驾驶技术的研究在公路管理、交通运输等领域有着广阔的应用前景,近年来自适应巡航这一概念逐渐应用于军事侦察和作战领域。在战场上,指挥车、炮车、侦察车等无人驾驶战车是以编队的形式来行进和转移阵地,战车在运动过程中通过车载传感系统感知道路环境,由控制系统按照战术规划确定行车路径并作出控制决策以实现战术编队在行驶过程中保持一致,所以控制算法是自主巡航技术实现的关键。
国内外对自适应巡航技术的研究取得了显著的成果,先后提出了基于模糊PID控制以及BP神经网络与PID控制相结合的自适应算法模型。首先是德国的汽车公司提出了比例反馈和补偿的思想,开启了PID应用于无人驾驶技术的先河[1-2],德克萨斯大学教授提出了基于在线优化和传感计算的自适应巡航算法,将自主导航技术推向了新的高度[3]。国内对于自适应巡航技术的研究也有一定的成果,文献[4]提出了一种基于并行神经网络PID模型的巡航控制算法,降低了导航的平均误差,文献[6]研究了一种在无人驾驶情况下自动跟随前方车辆行驶的控制算法,具有较好的鲁棒性。
随着神经网络理论的发展,越来越多的新技术融入到神经网络中。为了提高自适应巡航算法的精度和收敛速度,将小波算法与神经网络PID相结合,引入自适应学习速率法和附加动量法进行神经网络训练,仿真实验结果表明,加入小波算法的神经网络PID自适应巡航算法具有更快的收敛速度和更高的精度。
1 小波神经网络原理
由于小波函数具有良好的局部化性质,已经渗透到各个领域。小波变换是一种窗口大小固定但其形状[7-8]、时间窗和频率窗都可以改变的时频局部化分析方法,而小波神经网络正是在近年来小波分析研究取得突破的基础上提出的一种人工神经网络,它是基于小波分析理论以及小波变换所构造的一种分层的、多分辨率的新型人工神经网络模型,即用非线性小波基取代了通常的非线性sigmoid函数,其信号表述是通过将所选取的小波基进行线性叠加,相应的输入层到隐含层的权值及隐含层的阈值分别由小波函数的尺度伸缩因子和时间平移因子所代替。

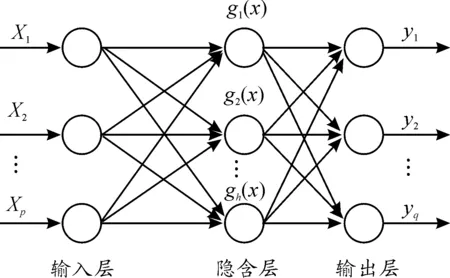
图1 小波神经网络结构模型
在传统的BP神经网络中,存在隐含层单元数目难以确定的不足[5,9],而小波神经网络的隐含层单元数目则可以按如下方法自适应地确定:首先取小波神经网络隐含层单元数目M为1,学习迭代若干次后,若满足误差条件则停止迭代,若达到最大学习学习次数后,仍不满足误差条件,则M+1;重复以上步骤直到满足误差条件为止,这样就能克服传统神经网络结构设计上的盲目性。
2 基于小波神经网络PID的控制算法
2.1 道路决策分析
研究中战车的自主巡航是以上级指挥车通过车载北斗装置下发报文解析出的行进路线为基准,每隔固定的时间T查询当前行驶方向,并将此状态设定为当前状态,将接收的行军路径设定为目标状态。在图2中取两个点并假设一个点为车辆的当前状态(v(t),θ(t)),另一个为目标状态(v(t+T),θ(t+T))。当T足够小时,车辆在时间T内可以视为做匀变速运动,可以用匀变速运动的相关物理公式推算出对油门和方向盘的偏移控制量。车辆在行驶过程中,主要是方向盘、刹车和油门在起作用,在研究中刹车跟油门可以视为一对相反的控制量放在一起讨论。
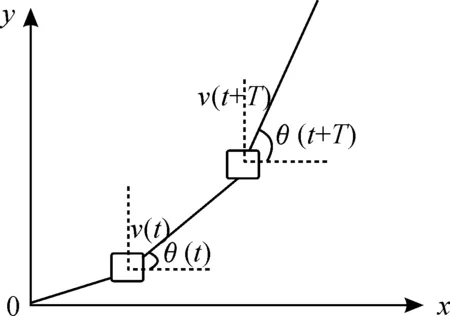
图2 车辆形式示意图
当车辆在转向时,由图2可知,汽车的侧向速度为v(t)cosθ(t),在无限小的时间间隔T后的理想状态为v(t+T)cosθ(t+T),此时可以将车辆在无限小的T时间内看作在横向上做匀变速直线运动,则在横向上的加速度为
(1)
由式(1)可以计算出横向加速度的大小,而改变其数值可以通过转动方向盘一定的角度λ来实现,在这里本文假定方向盘转角λ与汽车侧向加速度的比例系数为N,即λ=Nαx,代入公式后可以得到
(2)
将理想状态和当前行驶状态的信息代入式(2),就可以计算出在接下来的T时间内方向盘需要转过的期望角λ。这个期望转向角可以保证车辆在时间T后,达到规划路径中所期望的行驶状态,并开始新一轮的方向与速度的调整,如此循环就实现了车辆在行驶时方向上的自主导航。
在控制车辆的速度时,假设汽车的纵向车速为v(t)sinθ(t),而在一段时间T后的期望车速为v(t)sin(θ+t)。同理,在无限短的时间T内,车辆可视为在以一个加速度αy做匀变速直线运动,且
(3)
式中:αy可为正数也可为负数,当车辆加速时,αy为正,油门踏板的开合度减小;车辆减速时,αy为负,制动踏板的开合度增大。可知要想得到理想的纵向加速度,就是要得到合理的开合角度θ,在本文中假定开合度θ与纵向加速度之间的比例系数为M,则θ=Mαy,代入到式(3)后,得
(4)
综上所述,根据理想情况下的行驶状态信息可以推算出在T时间内,期望的转角和开合度的值,并将结果传递给自动驾驶系统参与控制流程,至此算法中关于道路决策部分全部分析完毕。
2.2 小波神经网络PID结构
一般的神经网络PID模型偏向于工程应用[11],对控制过程中目标值的跟随控制效果较差,尤其是对于速度变化后产生不可控的误差波动,原有的算法难以快速处理恢复,且易使控制系统失稳,难以满足车辆对设定路径的跟踪及抑制外部干扰的要求。针对上述问题,引入小波神经网络构建了一种新的PID模型,如图3所示。区别于之前神经网络在线修正PID权值的方法,本模型是直接在使用神经网络的基础上再次使用PID进行误差消除。

图3 小波神经网络PID模型
在该系统中,被控对象由PID控制器直接反馈控制,而小波神经网络则在通过学习后以一种稳定的状态在线调整PID控制器的3个参数kp、ki、kd使系统输出最优解。该神经网络PID的控制算式为
(5)
式中:kp=NNet*kp0;Ti=NNet*Ti0;Td=NNet*Td0。其中:kp0、Ti0、Td0分别为PID控制器的初始参数;NNet为经过学习后达到稳定状态的小波神经网络。
车辆的正常行驶很大程度上取决于当前的行驶方向和车速,因此,在研究中将车速和方向作为神经网络的输入,油门开合度和方向盘的转角作为网络的输出。由于此系统为多输入多输出的网络,且样本数据相对复杂,呈非线性的状态,所以选择多隐含层的结构。大量实验数据表明,双隐含层神经元的网络可以模拟任何复杂的函数[10],所以选择四层神经网络,即具有两层隐含层的结构。经过学习迭代实验,得出了满足误差条件的隐含层数目为第一层3个神经元,第二层5个神经元。然后是确定网络中的初始参数,神经网络权重初值的选取对于神经网络的学习和收敛起着很重要的作用,网络权重初值决定了神经网络学习的起点和方向。参考以往的PID控制器的特点以及大量的PID控制经验,设定输入层到隐含层的初始权重为Wij=+1,Wij2=,选择PID的3个参数为(0.69,0.1,0.19),即算法中隐含层到输出层的初始权值为W10=0.69,W20=0.1,W30=0.19。
3 实验验证
对于神经网络训练数据的获取,实验中选择一款某型号的榴弹炮车作为研究对象,利用Prescan软件设计了一套车速、方向、油门踏板开合度和方向盘转角的采集方案。Prescan内包含了丰富的动力学模型库,根据输入的各种设定参数,该软件会相应的生成所选车辆的动力学模型,实时记录模型的运动数据。一般来讲,训练样本越多,训练结果越能正确地反映其内在规律,但是样本的采集整理往往受到客观条件的限制。样本多到一定的程度时,网络的精度也很难再提高。在本研究中将训练样本数定为80组,将采集到的数据一部分作为神经网络的训练数据,一部分用来验证网络的训练效果,最后通过Matlab来进行结果的仿真。将由Prescan采集到的训练样本数据输入到Matlab神经网络工具箱中训练[10],训练函数首先选择trainlm,为了加速训练过程,在之后的计算中交替使用trainscg和trainrp作为训练函数。
本次试验中首先用采集到的训练样本对传统的神经网络进行训练,训练结果如图4所示。当期望路线为矩形波时,经过训练后的神经网络输出在直角转弯时的波动较大,不能很快地收敛于期望曲线,要在期望值上下波动一段时间才能趋于稳定。且实际方向与期望之间的最大误差为 -18.4307°,平均误差在10°左右。综上所述,传统的神经网络虽然可以较好地逼近目标曲线,但是误差曲线波动大,收敛时间较长。
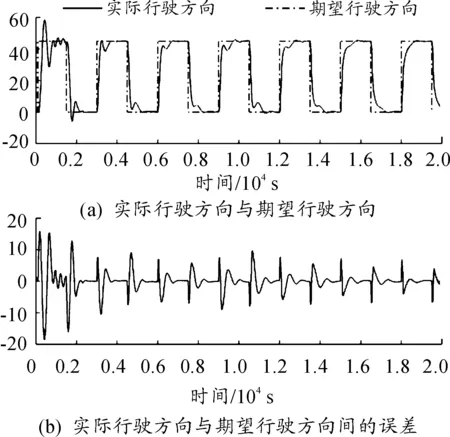
图4 传统的神经网络PID仿真结果
针对这一不足,采用Morlet小波函数取代sigmoid函数作为神经网络的激励函数,同时在小波神经网络的权值更新阶段增加一动量项:ΔW(t)=ηδU+αΔW(t-1),附加动量法反映了以前积累的调整经验,对于t时刻的调整起阻尼作用,当误差曲面出现骤然起伏时,可以减小振荡趋势,提高训练速度;神经网络的学习率采用自适应调节学习率,先设置一个初始的学习率,若经过一批次权值调整后总误差增大,则本次调整无效,且学习率η=βη(β<1);若经过一批次权值调整后总误差减小,则本次调整有效,且学习率η=θη(θ>1)。一共经历了约 1 000步的训练后达到了预期的结果,此时的小波参数
a=[0.136 4-1.043 90.516 4-3.965 41.552 6-1.911 1]
b=[0.139 4-0.273 80.158 5-1.422 30.014 4-1.252 7]
仿真结果如图5所示。经过训练后的小波神经网络将实际方向与期望之间的最大误差为13.389 6°,平均误差控制在5°以内,明显优于传统的神经网络算法,且神经网络输出的实际行驶方向与目标值契合度很高,在车辆经历90°直角转弯时能够更小的波动和更快的速度逼近期望行驶方向。

图5 小波神经网络PID仿真结果
通过对比分析图4和图5的仿真结果可以得出,传统的基于小波神经网络PID的自适应巡航算法能够以较高的精度逼近期望行驶方向,且当方向变化时能够以更快的速度调整方向以保持与期望路线的一致,可以更好地满足实际需求。
4 结论
提出了一种新的基于小波神经网络PID的模型,对于同样的学习任务,小波神经网络输出误差控制在5度以内,且能更快地逼近期望值,精度更高,收敛速度更快。实验结果表明,能够满足使用需求,且误差较小,瞬态性能良好,为无人驾驶战车的战术编队和行进提供了新的思路。
