基于大气偏振光的航向角探测系统
2019-04-11王玉波杨江涛
王玉波,杨江涛,唐 军,刘 俊,申 冲,秦 丽
(电子测试技术国家级重点实验室,仪器科学与动态测试教育部重点实验室,中北大学仪器与电子学院, 太原 030051)
天空是自然界中偏振光信息来源,当太阳光穿过大气层与其中的微粒发生散射时,就会产生许多不同偏振方向、不同偏振度的散射光,形成了包含大量偏振信息分布的特定的大气偏振模式[1-3]。部分昆虫和动物能够通过使用太阳偏振光在不同环境中完成稳定和高效的导航。其中蜜蜂可以在没有路径记忆的情况下飞到10 km以外,并且实现精确导航[4]。偏振光导航探测系统通过探测天空中散射光的偏振角和偏振度分布可以计算太阳矢量和太阳方位角,并依据太阳矢量和太阳方位角计算载体航向角,相对于卫星导航、惯性导航等导航方式,基于大气偏振光的导航方式具有自主性强、没有误差积累和精度较高等优点,是导航科学研究的前沿课题之一。
从大气偏振光模式中实时解算高精度航向信息是仿生偏振光导航方法中的关键问题。瑞士苏黎世大学的R Wehner教授及其团队一直致力于沙蚁等生物的偏振光导航行为和仿生偏振光导航机理方面的研究[5]。国内许多学者也开始研究天空偏振光学特性及仿生偏振光导航技术[6]。褚金奎教授研制一种新型的偏振传感器姿态确定系统,可保证车辆导航自主姿态测量具有一定的精度[7,8]。刘俊教授以生物研究为指导,探索了一种新的求解载体三维姿态角的算法,并通过实际仿真实验证实了算法的有效性[9]。
对昆虫利用偏振光导航的生物机理进行深入研究是偏振光导航发展的基础。从昆虫复眼的解剖学原理出发,运用仿生学基本思想,通过对昆虫利用对偏振光信息敏感的生物机理分析研究,设计了一种基于大气偏振光的航向角探测系统。并且对航向角探测系统进行了设计、安装和标定,建立了由生物模型到探测载体飞行参数的数学模型,结合现代导航方法和理论,使用图像三维几何矫正预处理算法,提出了一种基于大气偏振光分布模式的实现载体空间航向角参数探测的自主导航方法,为小型无人机在近地面环境中自主导航提供一种研究思路[10-12]。
1 偏振光探测系统的构成
研究过程中使用的航向角探测系统由三个偏振成像子系统组成。偏振成像系统如图1所示。系统由光学系统、偏振片、CCD、同步系统、图像采集系统和图像处理系统组成。系统镜头A、B、C使用了entaniya公司的RP-L220鱼眼镜头,分别安装了偏振方向为0°、45°和90°的偏振片,外界场景经光学系统传输,通过偏振片后,汇聚在CCD的感光平面上成像;由同步系统控制三个CCD对全天域同一场景进行同步采集、存储,最后交由图像处理系统进行偏振图像信息处理。
基于大气偏振光的探测系统具体工作过程为:① 摄像机初始化并分配ID地址;② 打开探测系统摄像机拍摄天空偏振图像;③ 将采集到的三张偏振信息图像存储在指定区域;④ 使用依据本文算法编写的程序进行图像处理和航向角解算。

图1 偏振成像系统
2 航向角探测系统的关键算法
2.1 基于Stokes矢量法的偏振探测原理
大气中的散射光线主要为部分偏振光,因此在大气偏振探测领域,Stokes矢量法成为应用最广泛的测量方法。通常一束光的偏振态使用Stokes矢量法可以表示为[I,Q,U,V]。由于在自然环境中,散射光线的圆偏分量非常微弱,在仪器探测的范畴内通常可以被忽略掉,即V=0。偏振探测系统中的CCD探测器只能探测入射光线的光强I参数,探测器接收到的光强I与入射光的Stokes矢量矩阵相关关系可表示为:
(1)
式中:φ为偏振片透光轴方向和参考方向的夹角,I(α)为透光轴方向不同的偏振片对应的出射光的强度值,可以通过光电探测器件如CCD等探测得到。I0、Q0、U0为待求的入射光线的Stokes参数,如果设置三个不同φ值的检偏通道,就可以得到三个关于I0、Q0、U0的方程,联立即可解得三个参数。将φ分别取0°、45°和90°,得到三元方程组:
(2)
式中:I1、I2、I3分别为三个通道出射光光强,将上式同式(1)联立即可解算出入射光的偏振度Dop和偏振角Aop。
(3)

(4)
因此,只要测出入射光的斯托克斯参量,就能由式(1)、式(2)求出入射光的偏振度和偏振角分布。
2.2 利用加速度计获取载体的横滚角和俯仰角
重力矢量在地理坐标系下的分量为[0 0 -g]T,当载体处于静止态(相对导航坐标系无加速度)时,安装在载体坐标系下的加速度计测量值为ab= [axb,ayb,azb]T,由于重力加速度垂直于水平面,故载体的航向角不影响x方向和y方向加速度的输出,则
(5)
式中:γ和θ分别为载体的横滚角和俯仰角。由此可推算出横滚角γ和俯仰角θ的倾角基本解算公式为
(6)
2.3 三维图像几何矫正预处理算法
在实际拍摄过程中,由于拍摄角度以及镜头的光学畸变,图像中本身会出现部分扭曲和形变。最主要的问题来自于摄像机拍摄角度的不同引起的图像倾斜变形,对进一步的图像信息提取和特征分析造成了阻碍,因此需要针对拍摄角度进行图像矫正预处理。
在进行图像处理的时候,需要利用加速度计实时得到载体俯仰角和横滚角,从而推导整个图像上中心点的具体坐标,得到整幅图像的方位坐标变化量,通过一定角度将拍摄的图像还原为正视图像。在矫正处理过后,这一幅图像不仅能直接运用在图像配准和拼接上,更能进行进一步的处理,提取导航特征点信息,计算得到载体航向角,实现正确导航。
该矫正预处理算法中一般可以把相机拍摄的过程认为是一种透视投影的方式,投影的边缘线汇聚交叉在某个点上,因此拍摄的景物若是靠近图像中心则会尺度会放大,反之则会变小。由于载体本身以一定姿态进行活动,固定在载体上的摄像头也就与水平面构成一定的角度,拍摄出来的图像就相对的有形状的变化。矫正处理的关键就是消除载体姿态所带来的拍摄角度的影响,将拍摄的摄影平面坐标系转换为实际空间图像坐标系,如图2所示。

图2 图像矫正坐标变换示意图
图2中,假设摄影平面坐标系为(x,y,z),实际平移坐标系为(x′,y′,z′ ),实际空间坐标系为(X,Y,Z)。飞机S在实际空间坐标系中的坐标为(Xs,Ys,Zs),平面A为摄影图像平面,平面B为实际空间图像平面。θ、γ、φ分别为飞行器的俯仰角、横滚角和航向角。
假设航向角φ、横滚角γ均为0,即飞行器只与X轴成一定的俯仰角θ,即可得到投影平面坐标系和实际平移坐标系之间的变换矩阵:
(7)
同理,在只有横滚角γ发生变化,坐标系变换矩阵为:
(8)
当载体的姿态角度为[θ、γ]时,可知摄影平面坐标系与实际平移坐标系的变换矩阵M=MθMγ。因此我们可以得到摄影平面坐标(x,y,z)与实际平移坐标(x′,y′,z′ )之间的变换关系,如公式
(9)
通过上述变换矩阵M将摄影平面坐标系转换为实际空间坐标系,可以将以一定角度拍摄的图像转换为90°垂直的图像,对点阵图图像转换实验效果如图3。

图3 对点阵图图像转换实验效果
3 实验与结果
在实验过程中,充分利用天空的辐射特征和拓扑特征,即天空具有一定的连续性。利用该方法可以快速有效地去除非天空区域,对于排除图像中大量干扰点具有很好的效果。
对提出的三维图像几何矫正预处理算法进行程序编写并调试在上位机运行。将同时采集的A、B、C三幅图像经过三维图像几何矫正预处理后,可以变换为东、北、天坐标系下的灰度图(如图4)。再通过Stokes矢量法解算出偏振方位角Aop(如图5)和偏振度Dop(如图6),进而提取子午线特征点(如图7),使用最小二乘法对特征点进行直线拟合(如图8)。该拟合所得直线结果与理论子午线夹角为所求载体航向角,可由上位机输出航向角结果。

图4 原图A、B、C及变换为东北天坐标系下的灰度图
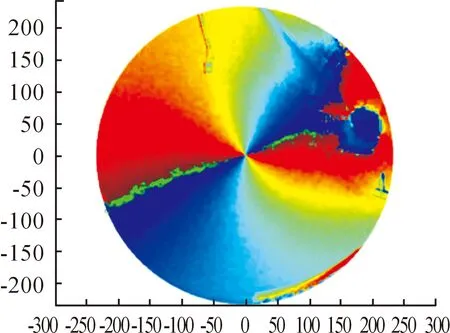
图5 偏振方位角Aop分布

图6 偏振度Dop分布

图7 子午线特征点提取
将基于大气偏振光的航向角探测系统放置在室外,调整载体方向使得整个系统的体轴以正北方向为基准。实验地点选在中北大学科学楼前后部分路段,周围建筑物遮挡较少,实验当天天气情况良好,实验轨迹如图9所示。

图8 子午线特征点最小二乘法拟合

图9 实验轨迹图
依据本文算法,在基于大气偏振光的航向角探测系统上进行航向角解算。引入实时俯仰角和横滚角(如图10所示),利用三维图像几何矫正预处理算法,进行基于大气偏振模式的载体航向角实时解算,航向角解算结果如图11所示,其解算误差如图12所示。 由上述的测量结果可知,航向角探测系统采用三维图像几何矫正预处理算法进行航向角测量,实验时长为460 s,每个采样点平均耗时0.5 s,平均采样频率为2 Hz,最大动态误差为1.74°,平均误差为0.16°,较好地满足了导航需求。
从图10和图12可以看出,在第150 s瞬间时,俯仰角、横滚角较小,计算误差较小;在第200 s瞬间时,俯仰角、横滚角较大,计算误差也较大。因此,航向角探测系统采用三维图像几何矫正预处理算法进行航向角测量时,应尽量保持水平,减少姿态引起的测量误差。

图10 俯仰角和横滚角

图11 航向角解算结果

图12 航向角解算误差
4 结论
1) 设计了基于大气偏振光的航向角探测系统,提出了一种自动化的天空偏振模式图像矫正算法,能够在上位机的控制下对当地的天空偏振信息进行探测,并能够便捷、快速、准确地解算载体航向角,其航向角平均误差为0.16°。
2) 该自动化天空偏振模式图像矫正算法中,每个采样点平均耗时0.5 s,平均采样频率为2 Hz,效率较传统偏振模式探测仪器高。
