伺服控制系统电流及速度环自动参数辨识分析
2019-04-08尹显明钟伦超
张 秘,尹显明,钟伦超,刘 洋,尹 君
(1.西南科技大学科学与制造工程学院,四川 绵阳 621000;2.西南科技大学工程技术中心,四川 绵阳 621000;3.清华大学深圳研究生院,广东 深圳 518000)
0 引言

本文采用频率扫描法在线获取电机的三相电阻及电感,根据所得到的参数建立电机的幅频裕度曲线。然后根据系统带宽要求,同时利用电流跟随方式,对系统比例积分(proportional integral,PI)参数进行调节,从而解决了不同电机在运行条件不一样时,PI参数与电机参数不匹配的问题。在速度环的处理上,采用频率激励方式,获取速度环的幅频裕度曲线。根据系统带宽设计要求,调整相位裕度与增益裕度,从而得到速度环的PI参数。
1 电流及速度环控制方法
1.1 系统数学模型
针对所有反电势为正弦波的电机,均可按照永磁同步电机的控制。忽略电机的谐波、涡流和磁滞损耗,在电机调速系统中,与转速相关的反电动势项在电流的瞬变过程中相当于一个变化较慢的扰动,所以电流环PI参数设计过程中可以暂不考虑反电动势项的影响。对于一个理想的转矩控制,id=0。电机的电压、转矩和运动数学模型如下[9-10]:
(1)
(2)
(3)
(4)
式中:ud、ua为定子d、q轴的电压;id、ia为定子d、q轴的电流;R为定子电阻;Ld、La为定子的电感;P为电机的极对数;ωr为转子的角速度;Ψ为磁链;ed、ea为反电动势;Te为电磁转矩;Tl为负载转矩;B为摩擦因数;J为转子转动惯量;Ts为电流采样周期;idc为d轴控制电流,idc=0;iac为q轴控制电流。
1.2 传统的电流环参数辨识
传统电流环控制结构如图1所示。
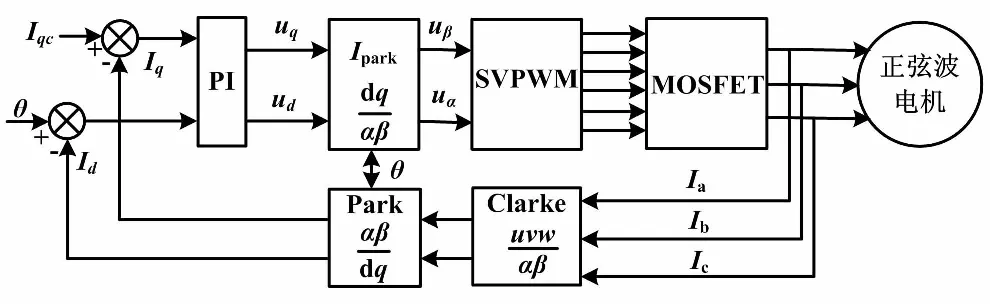
图1 传统电流环控制结构图Fig.1 Structure diagram of conventional current loop control
电流检测单元检测到的三相电流Ia、Ib、Ic(Ia+
Ib+Ic=0[11])经过Clarke变换后将三相交流转换为αβ两相静止坐标系,然后经过Park变换转换到dq坐标系下的励磁分量id和转矩分量ia。分别设计控制器进行励磁控制和转矩控制,将得到的励磁控制量ud和转矩控制量ua进行逆Park变换得到uα和uβ,最后经空间矢量脉宽调制得到六路脉宽调制(pulse width modulation,PWM)占空比,实现调制和控制过程。
对电流进行采样的时间可选在PWM波各开关周期的起始时刻[12],也能选在开关周期的中点[13]。在起点时刻采集能够获得谐波成分相对较少的基波电流值,有利于实现高精度的电流闭环控制。传统的电流环PI参数多采用手动调试,PI控制将采集到的电流与给定电流比较。受硬件条件限制,当前周期计算的ud和ua要等到下个周期才能施加,等到下一周期结束时,电流才有可能跟踪上本周期的电流指令。在两个控制周期内,q轴电流达到控制值。
1.3 改进的电流环参数辨识
改进的电流环控制主要是基于参数的辨识,然后将辨识得到的参数设计控制器与反电势补偿。改进电流环控制结构如图2所示。
在(k-2)Ts~kTs时间间隔内,得到如式(5)、式(6)所示的q轴数学模型。
(5)
(6)

图2 改进电流环控制结构图Fig.2 Structure diagram of improved current loop control
对电流环进行分析,将式(5)与式(1)相减,得:
(7)
将式(6)与式(2)相减,得:
(8)
从式(7)、式(8)可知,需要得到电机的电阻与电感参数,其中电感的辨识需要参数电阻R和磁链Ψ,在此采用正弦扫频激励完成电流环的系统辨识过程。
电流环扫频函数选取式(9)所表示的函数。
(9)
式中:fl为扫频频率范围的下限;fh为扫频频率范围的上限;t1为扫频过程的持续周期。
根据电机的阻抗、感抗公式,推导式(10)表示的函数。
(10)
式中:f为扫频频率;La为a相电感;ia为a相电流;Ra为a相电阻;U1根据不同扇区确定。
为了方便进行电流环辨识,扫频过程开始于低频段,并根据式(9)逐渐提高频率。一旦达到最高频率fh,就逐渐减小至最低频率fl。
1.4 改进的速度环参数辨识
由式(1)、式(4)可得:
(11)
速度环框图如图3所示。

图3 速度环框图Fig.3 Block diagram of speed loop

2 仿真验证
忽略电机的谐波,以扫频函数作为电流环闭环转矩控制量ua,采集原始电流等信号。由式(10)得到各相参数,经过坐标变换得到电流转矩分量ia,利用Matlab对原始数据进行处理。跟随扫频函数的电流波形如果图4所示。

图4 跟随扫频函数的电流波形Fig.4 Current waveform following sweep frequency function
从图4可以看出,所用电机模型较好地反映了原始数据,仿真中协方差和丢失数据也都在允许范围内;还可以根据系统带宽要求,结合跟随效果,适当加大系统带宽。
利用图4的控制结构,结合电流环的仿真参数,对速度环进行仿真,给定速度为4 000 r/min。电流环辨识下的速度仿真波形如图5所示。
3 试验结果
试验采用Maxon EC系列无刷电机,处理器采用TI6000。调试电流环时电机空载,调试速度环时让电机带载3 kg。试验数据通过数字信号处理(digital signal processing,DSP)传送到计算机。
速度波形、电流波形如图6、图7所示。给定速度指令为4 000 r/min,采集电机实际速度与给定速度、实际电流与给定电流。从图6、图7可以看出,电机速度环具有很好的动态性能,未出现振荡,适合电传操纵系统的实际运用,同时,实际速度与仿真速度均能展示电机的速度动静态性能。

图6 速度波形Fig.6 Speed waveform

图7 电流波形Fig.7 Current waveform
4 结束语
本文提出了一种基于扫频方法的正弦波电机电流与速度环控制方法,利用不同正弦频率信号作为响应信号,同时在测试过程中给予由低到高的的测试激励电流。相对于PI试凑调试[14],该方法可实现对不同电机的快速调试,根据电流跟随效果决定参数是否合适,同时系统不会出现超调与振荡,动静态性能明显提高。相对于传统的电流预测方法,本文方法能有效避免控制周期的延时。仿真和试验结果都显示出基于扫频的控制方法良好的动静态性能,具有很强的工程使用价值,值得应用推广。
