模型不确定二质量系统的振动抑制与实验研究
2019-04-03徐宝申
徐宝申, 周 波
(1. 北京城市学院 资源设备管理办公室, 北京 101309; 2. 北京城市学院 信息学部, 北京 101309)
工业生产设备中普遍存在柔性连接负载,使伺服系统在加减速过程中产生振动,不但严重影响设备安全运行,而且迫使伺服系统降低响应速度,以致影响伺服系统的控制品质。电机驱动系统通常可视为二质量柔性扭转系统,研究此类柔性负载的振动抑制问题对提高伺服系统性能具有重要意义[1]。
针对二质量系统振动抑制的研究成果包括基于多项式惯量比的低阶IP控制器设计[2]、基于极点配置的PI/PID控制器设计[3-4]、模糊控制及神经网络控制[5-6]等。其中采用低阶IP控制的方法结构简单、参数设计方便,在工业中得以广泛采用。此外,为进一步提高系统响应速度,研究人员引入输入整形前馈以实现机构残余振动的快速抑制[7]。然而,不论是输入整形器还是低阶IP控制器,均依赖系统的模型参数。但在实际工程应用中,难以对柔性轴的刚度系数和系统谐振频率精确建模。此外,生产现场伺服系统只有电机端速度可测,而由于传动间隙及减速比等原因,电机端速度振动微小,传统分析手段很难识别出系统的特征参数。
为此,本文提出一种对电机端速度阶跃响应进行时频分析,以获得系统的谐振频率及阻尼特征参数的方法,进而设计了IP反馈控制器和输入整形器相结合的抑振控制器。用搭建的二质量扭转谐振平台实验,证明该辨识方法有较好的响应速度与抑振效果。
1 二质量系统建模
由于柔性机械元件自身的惯量通常比电机转子或负载小很多,因此柔性连接系统在建模时,往往忽略其惯量,或将其与电机、负载惯量合并计算,并将其弹性作用等效为一个理想扭转弹簧,如图1所示。
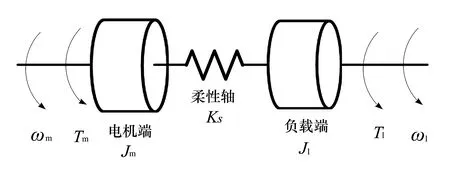
图1 二质量系统模型
根据动力学相关理论分析系统可获得关于电机端转矩Tm和电机端转速ωm之间的传递函数P(s):
(1)
其中:ωres和ωares分别代表系统谐振频率与反谐振频率;Jm代表电机端惯量。
为了广义上的讨论,用s*=s/ωares代替变量s对式(1)进行标准化:
(2)
其中:q代表惯量比。
为了计算简便,标准化后的二质量系统传递函数可简化为
(3)
2 控制器的设计
单独使用IP控制器时,系统响应时间较长;增大积分系数虽然可以提高系统响应速度,但积分作用过强会重新激起系统的振动。因此,需要在IP反馈控制器的基础上引入ZV(zero vibration)整形器,在提高系统响应速度的同时达到较好的抑振效果。控制系统的整体结构设计如图2所示。
实际工业应用中,通常很难获得系统负载端的响应信息。为此,本文尝试通过对电机端速度ωm进行时频分析,识别系统谐振频率及调整时间等关键参数,进而设计IP反馈控制器及ZV整形器。
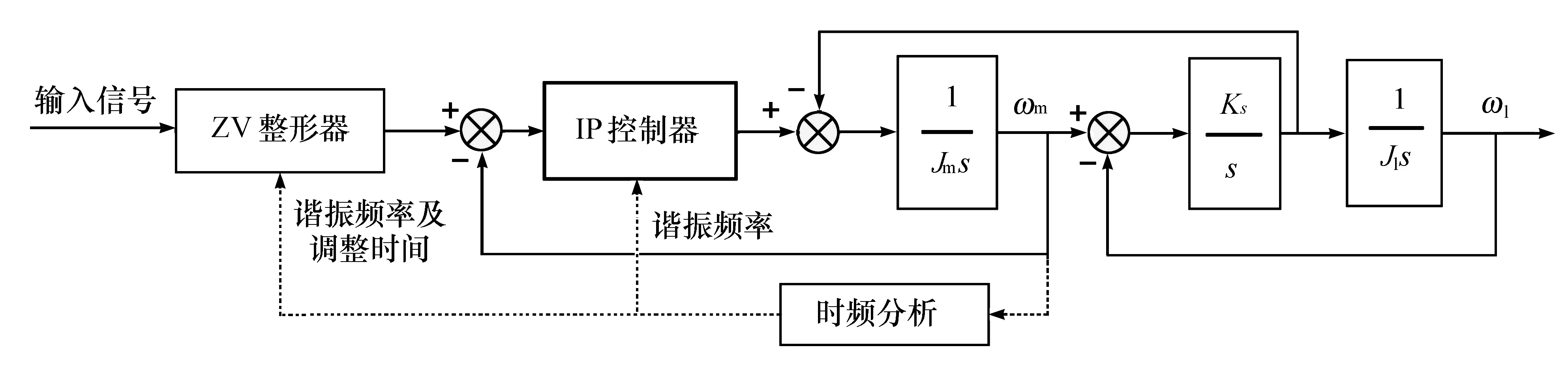
图2 控制系统整体设计
2.1 改进算法描述(IFOA)
带有IP反馈控制器的闭环系统框图如图3所示。
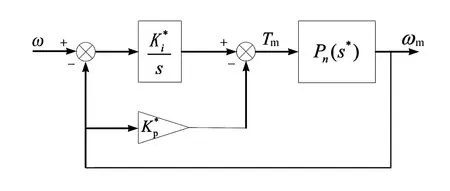
图3 闭环系统框图
闭环系统传递函数Gn(s*)可通过框图推导得出:
(4)

由式(2)可知,计算IP控制器参数需要知道电机端惯量、负载端惯量以及系统谐振频率。其中,电机端和负载端惯量容易通过建模或计算获得。因此,IP控制器参数设计的关键在于系统谐振频率的识别。
2.2 ZV输入整形器设计
输入整形技术由一系列脉冲信号组成,通过对输入信号进行整形来减小振动。作为一种前馈控制,输入整形根据系统的特性进行设计求解,得到不同幅值和时滞时间的脉冲序列,然后将输入信号与不同整形器脉冲序列进行卷积,产生整形后的控制信号来控制系统[9-10],如图4所示。
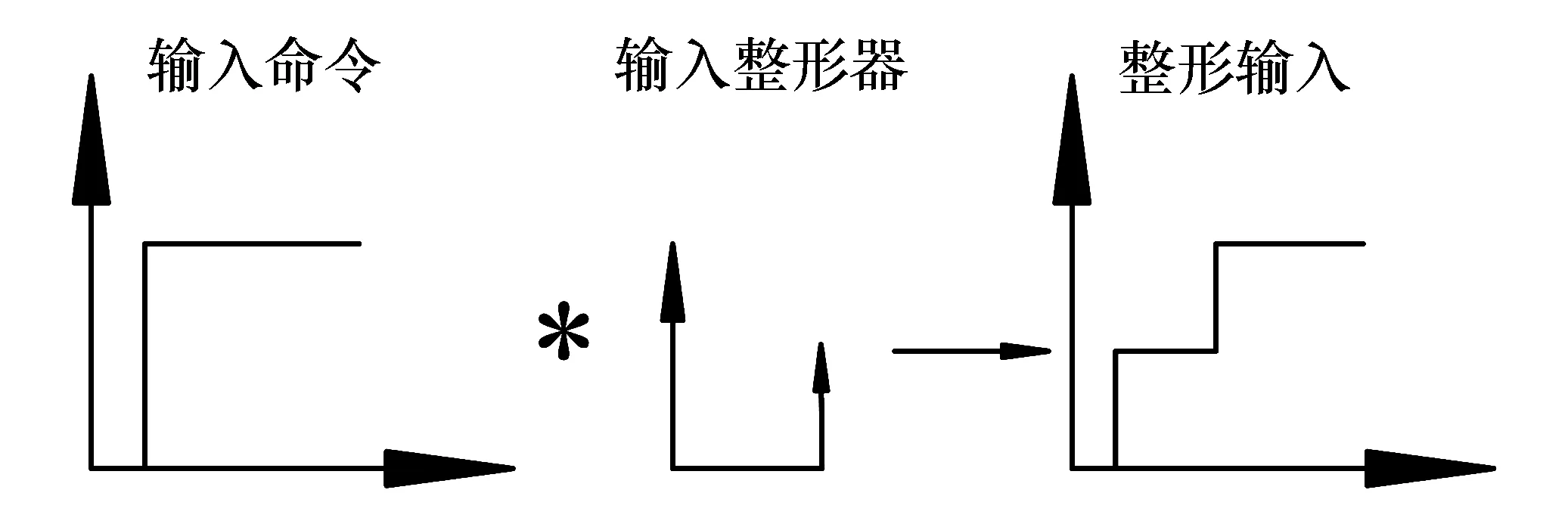
图4 输入整形器对输入信号进行成形
ZV整形器一般包含2个脉冲,认为第一个脉冲发生的时刻t1=0,则其数学表达为
(5)
其中:Ai为脉冲幅值;ti为作用时间;ωres为系统谐振频率;ξ为系统阻尼比。
因此,获取系统的谐振频率和阻尼比成为ZV整形器设计的关键[8]。
2.3 基于时频分析的系统参数识别
控制器设计的关键参数是系统的谐振频率和阻尼比。在实际工程应用中,负载端信息获取困难或成本较高,因此需采用时频分析的手段对电机端速度阶跃响应进行分析,通过微弱振动信号特征的提取以及获得系统频域和时域上的信息,最终完成整体控制器的设计。
短时傅里叶变换(STFT)是时频分析手段中最有效的方法之一[9]。短时傅里叶变换的基本思想是利用非平稳信号局部平稳的特性,采用一定长度的窗函数在时间轴上滑动截取信号,并对每段截取的信号进行傅里叶变换[10-11]。短时傅里叶变换的离散形式是通过在时频上等间隔时频网格点(mΔt,nΔf)对信号z(kΔt)进行采样,得到以下公式:
[(m-k)Δt]e-j2π(nΔf)kΔtΔt
(6)
其中,z(kΔt)相当于测得的电机端速度阶跃响应;mΔt为时间点;nΔf为频率点;Δt为时间变量的采样间隔;Δf为频率变量的采样间隔;η(Δt)为时窗函数。
为了得到理想的分析效果,选择一个合适的窗函数是STFT的关键。考虑到待分析信号是电机端速度阶跃响应,此信号的采集从启动瞬间开始,一直到系统达到稳态,属于非平稳随机过程数据[12-13],因此选择汉宁窗,从而有效地抑制信号能量的泄漏。
3 实验系统及其测试
3.1 实验平台搭建
在二质量扭转谐振平台中,直流有刷电机由可编程控制器(PC)通过电压调节模块(VRM)驱动。电机端质量块与电机通过联轴器连接。弹簧模拟柔性轴连接电机端与负载端。两个相同型号、分辨率为4 000脉冲/圈的编码器分别接在电机端与负载端。为模拟真实情况,电机端编码器用于反馈控制与参数辨识,负载端编码器用于辨识参数的校验与末端控制效果的监测。整体实验系统的结构如图5所示。
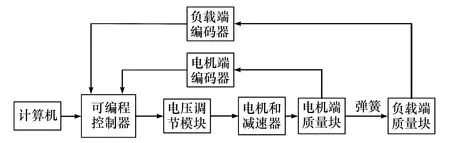
图5 二质量扭转系统实验平台结构框图
实验台电机端质量块、负载端质量块和其他部件参数如表1所示。

表1 直流电机、联轴器、刚性轴以及质量块惯量
电机端等效惯量Jm和负载端等效惯量Jl按如下公式计算:
Jm=Jm1+Jm2+Jmass1
Jl=Jm2+Jmass2
3.2 实验测试与分析
不同规格的弹簧具有不同的刚度。通过更换4种规格的弹簧(见表2)验证上述方法的适用性。
在不同弹簧刚度下对开环系统电机端速度阶跃响应进行时频分析,得到的时频谱如图6所示。其辨识获得的参数以及根据式(4)计算出IP控制器的参数KP、KI如表2所示。
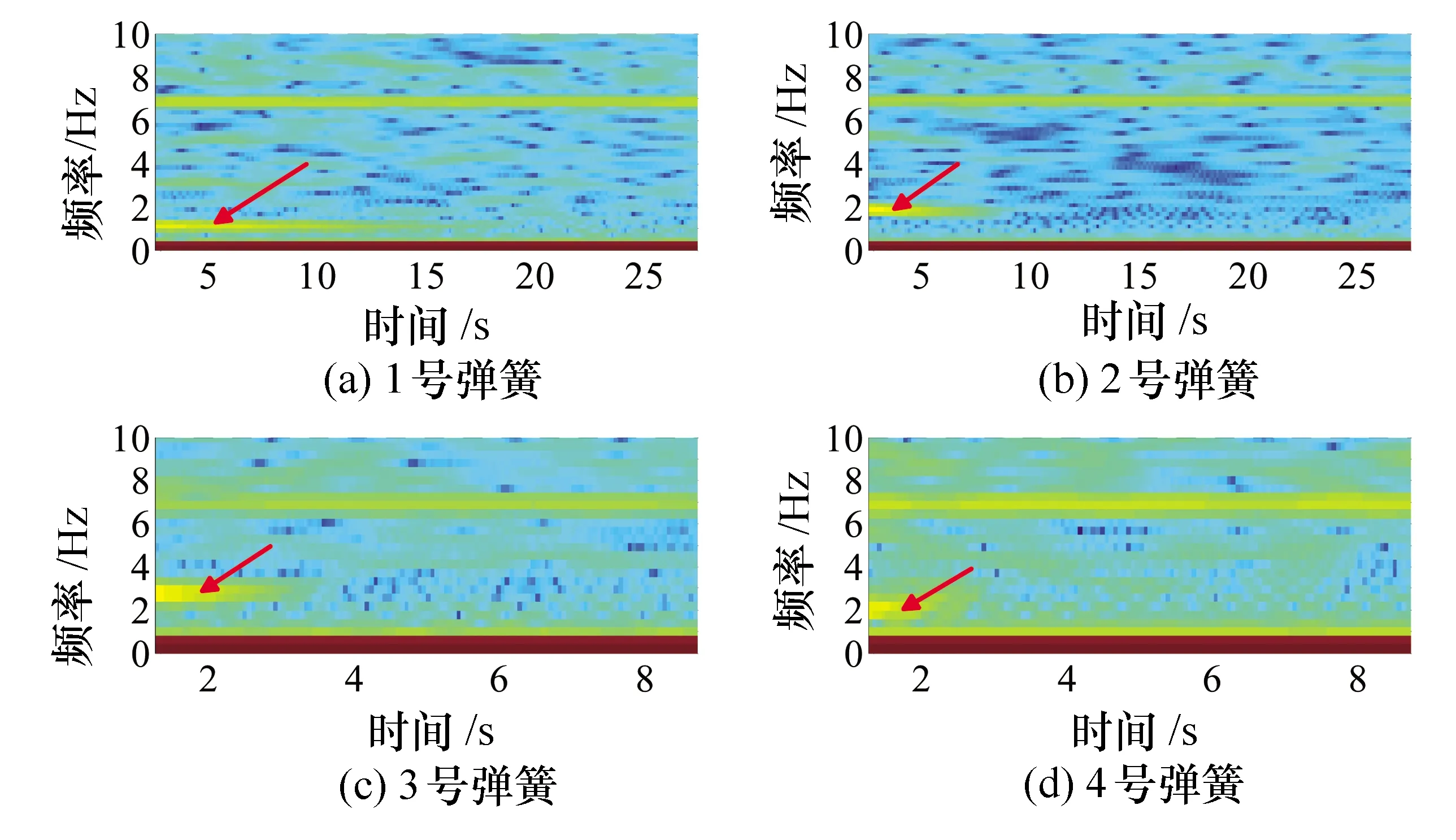
图6 电机端速度响应的STFT频谱(q=0.285)
在IP控制器作用下,电机端和负载端的速度阶跃响应如图7所示,没有超调量的产生,负载端速度曲线几乎与电机端速度曲线重合,仅在电机启动瞬间有微弱的振动产生,图7(a)、图7(b)所示。虽然IP控制器有很好的抑振效果,但系统响应速度慢(如图7(a)所示,需要25 s),即使刚度较大时(如图7(d)所示)也需要5 s左右。
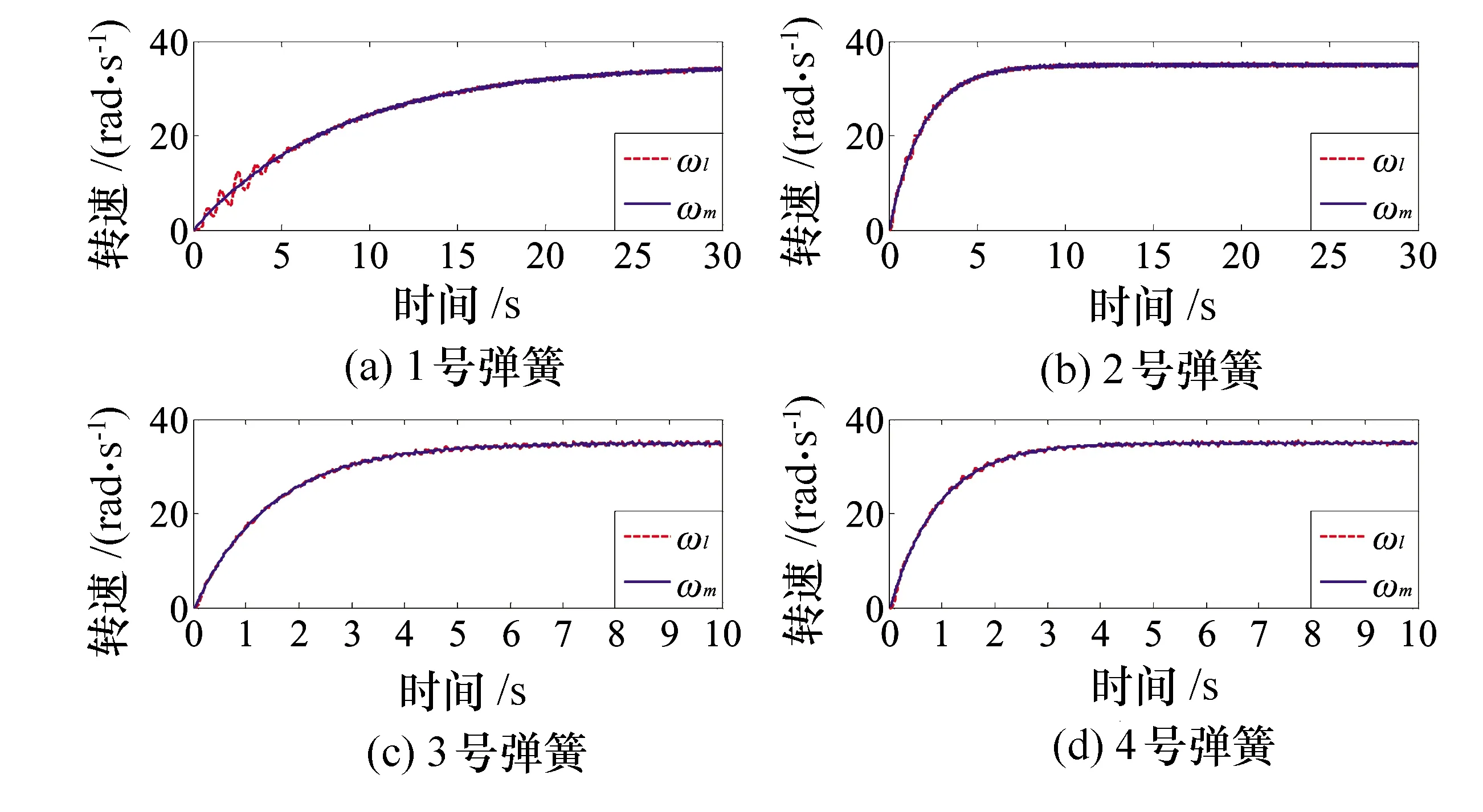
图7 加入IP控制器后电机端和负载端速度 响应曲线(q=0.285)
在增大积分系数的基础上加入ZV整形前馈控制器,得到的实验结果如图8所示。通过图8的实验结果不难看出,系统的振动得到有效抑制,使速度很快达到稳态。上述实验结果表明:通过时频分析获得系统特征参数进行的控制器设计,可以达到快速响应和有效抑振制的控制效果。
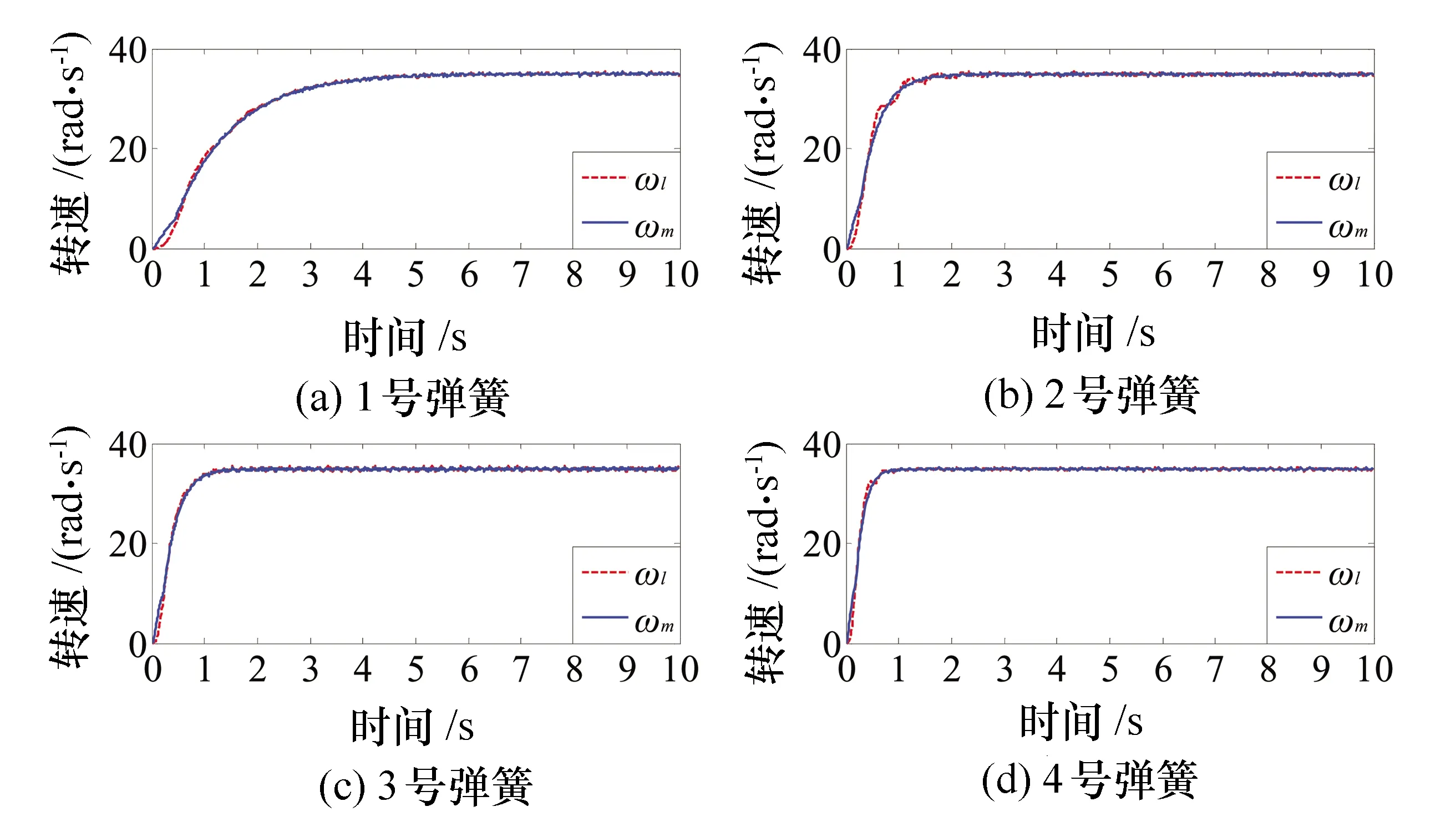
图8 添加ZV整形前馈控制器后电机端 和负载端速度响应曲线
4 结语
在柔性轴刚度未知的情况,通过对开环系统电机端速度阶跃响应进行短时傅里叶变换,可以有效识别出系统谐振频率以及调整时间,进而计算出IP控制器以及ZV整形器参数。IP反馈控制器虽然能够有效抑制负载端的振动,但系统响应时间过长;而引入ZV整形前馈,不仅能有效抑制振动,而且能使系统快速达到稳态。
