3-RPS并联机构神经网络滑模变结构控制
2019-04-02陈振威
王 欣,陈振威
(1.东莞职业技术学院 电子工程系,广东 东莞 523808; 2.东莞成电金盘软件技术有限公司 技术部,广东 东莞 523000)
并联机构具有多运动空间维度、运动精度高、结构刚度大等特点,因而广泛应用于生物工程、微纳制造及装备、并联机床等高精密领域[1].随着并联机构宏观控制与微观控制技术相结合的研究不断深入,并联机构的控制系统设计越来越受到学者们的关注,但是并联机构是一个高耦合、强非线性的多变量控制系统,如何降低并联机构的轨迹跟踪误差逐渐成为研究的重点[2].文献[3]基于一种空间3自由度并联机构的运动学和动力学模型,采用自适应反演滑模变结构控制研究了机构的稳定误差和稳定时间.文献[4]以6-PUS并联机构为研究对象,采用简化模型和线性反馈求解的方法,设计了一种神经网络PID控制器,对机构的启动力矩、稳态误差和抗干扰性进行了仿真.文献[5]通过Matlab软件建立了3-RPS并联机构的仿真模型,比较了PID和滑模变结构控制器在添加干扰条件下的轨迹跟踪误差.文献[6]提出了一种基于6自由度并联机构的模糊PID控制器,讨论了控制系统的运动精度和动态响应.为了降低3-RPS并联机构的轨迹跟踪误差,本文设计了一种径向基函数(Radial Basis Function,RBF)神经网络滑模变结构控制器,有效提高了机构的轨迹跟踪精度.
1 3-PRS并联机构模型
1.1 机构特征
3-RPS并联机构主要包括对称的3条支链、动平台和定平台3部分结构,每一部分支链含有3个运动副,即1个转动副(R)、1个移动副(P)和1个球副(S).机构通过R副与定平台相连接,S副与定平台相连接,并在R副与S副间通过P副进行串联,R副是机构的驱动副,为机构提供动力.分别在机构定平台等边△abc和动平台等边△ABC的中心点,建立机构的静坐标系O-XYZ和动坐标系o-xyz,等边△abc和△ABC的边长分别为m和n,各杆件的长度均为l,与定平台的夹角为φi(i=1,2,3).3-RPS并联机构模型如图1所示.

图1 3-RPS并联机构模型Fig.1 Model of 3-RPS parallel robot
1.2 运动特性分析
由螺旋理论可知,研究并联机构的运动特性,首先需要分析每条支链对动平台产生的运动螺旋,并综合分析机构所受的约束螺旋类型,以分析出机构的运动特性[7].由于3-RPS并联机构是对称机构,因此,只需研究机构的一条支链的约束螺旋即可.取支链Bb为研究对象,支链转动副B的轴线方向为绕Y轴转动,则转动副B的运动螺旋为
移动副的运动螺旋为
球副B可以等价为3个转动副,假设其3个转动副的轴线方向分别为绕X,Y和Z轴的转动,则球副B的运动螺旋为
综上,支链Bb的运动螺旋系为
由于机构运动螺旋与约束螺旋的互易积为0,可得机构的约束螺旋系为
(1)
根据式(1)和并联机构的对称性可得,机构动平台总共受到3个约束力的作用,方向与对应基面上转动副的轴线方向一致.因机构在初始状态时动定平台平行,所以该3个约束力的线矢共面.该3个不汇交的约束力共面线矢是线性无关的,则约束了机构动平台沿X,Y轴的移动和绕Z轴的转动.因此,3-RPS并联机构可实现绕X,Y轴的转动和沿Z轴的移动.
1.3 机构动力学模型
采用拉格朗日法(Lagrange法,L法)研究并联机构动力学特性时,从动能和势能的角度进行分析,不用考虑机构角速度和加速度的问题,求解较简便.因此,采用L法描述的3-RPS并联机构二阶微分方程为[8]
(2)

2 神经网络滑模控制律
2.1 控制器的设计


在实际工程运用过程中,由于摩擦、振动等不确定因素的存在,不可能精确地建立机构的动力学模型,所以机构模型不可避免地存在未建模部分,且存在外界干扰的作用,故F=0是不成立的.因此,上述的控制律τc所控制的机构闭环系统不具有鲁棒稳定性.基于上述控制律的缺陷,本文采用RBF神经网络控制律τR来逼近控制律τc,其结构原理模型如图2所示.RBF神经网络算法具有强大的在线识别、非线性系统映射和自学习功能,可实现对系统模型不确定参数的在线估计和对外界干扰的补偿,从而有效提高了滑模控制器的鲁棒性.
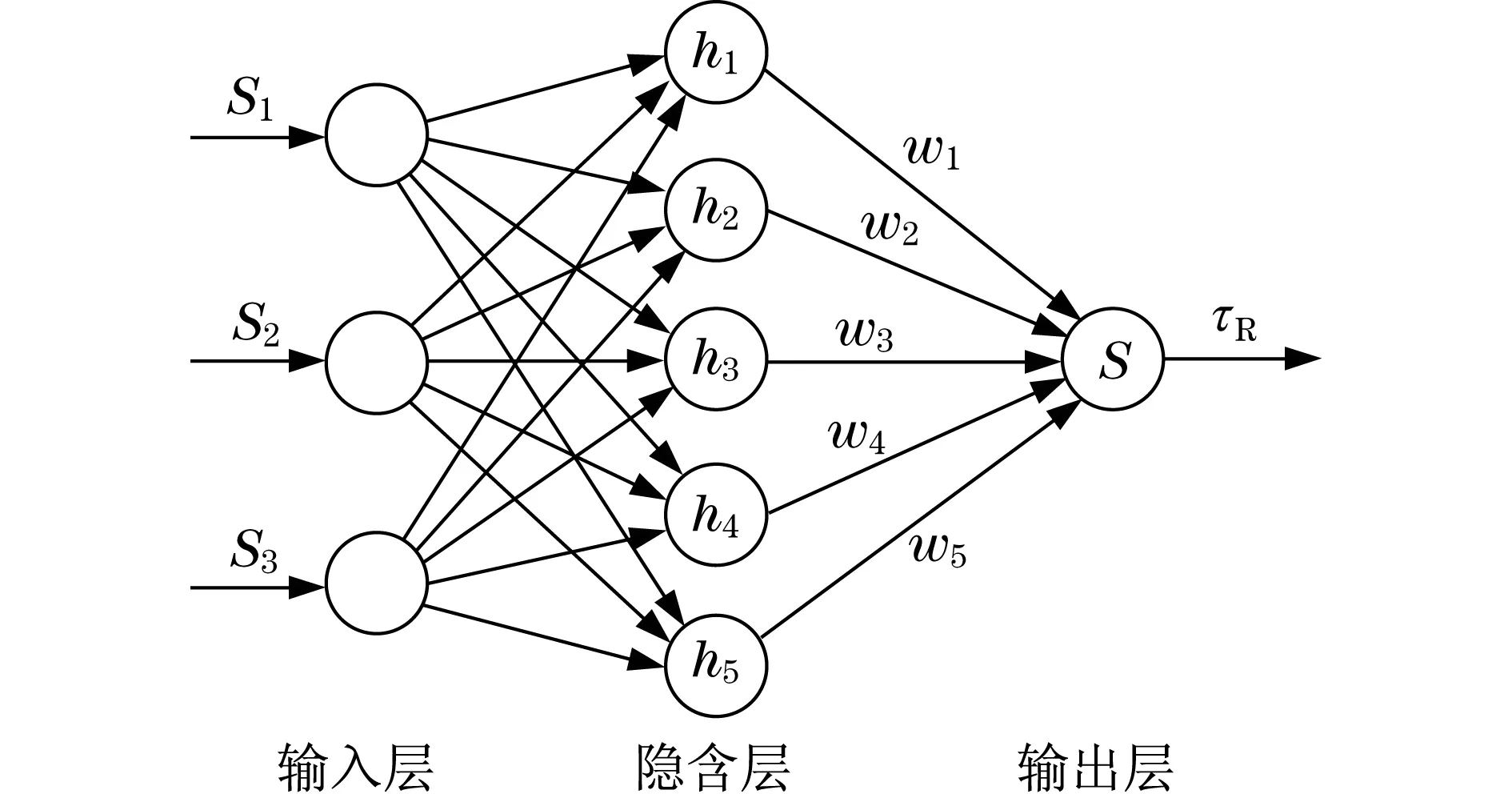
图2 RBF结构原理模型Fig.2 Model of RBF structure principle
通过引入RBF神经网络算法,则控制律τR可表示为

(3)
式中:τa为有界项;τb为鲁棒项.
2.2 有界项分析
将式(3)代入式(2)的变形表达式可化简为
构造的Lyapunov函数为
对上式求导可得
若存在已知函数|f|和常数|d|,使不等式|Fi|≤f,|Di|≤d成立.选取有界项为
(4)
式中:Γ(t)为关于Me的分段函数;Kai=|τRi|+|τsi|+d+f.


2.3 鲁棒项分析
对上式求导可得
式中:ω1=ω+F为机构建模偏差.
(5)
式中:λmin(M)为矩阵M的最小特征值.
3 控制仿真


图3 神经网络控制示意图Fig.3 Schematic diagram of neural network

图4 机构X轴方向的跟踪误差曲线Fig.4 Tracking error curve of mechanism’s X axis
由机构的跟踪误差曲线可知,机构在滑模变结构和神经网络滑模变结构控制策略下都能达到一定的稳定跟踪精度,两种控制方式在开始的1 s内,跟踪误差都比较大,这可能与机构启动时需克服摩擦阻力有关.但是随着神经网络控制的逼近运算,神经网络滑模变结构控制的误差逐渐趋近于0,而滑模变结构控制的误差还是较大,说明神经网络滑模变结构的控制效果更好,在响应速度和稳定性方面较优.

图5 机构Y轴方向的跟踪误差曲线Fig.5 Trackingerror curve of mechanism’s Y axis

图6 机构Z轴方向的跟踪误差曲线Fig.6 Tracking error curve of mechanism’s Z axis
4 结论
通过分析3-RPS并联机构的运动学特征和动力学方程,为控制系统的设计提供了控制对象.在滑模变结构控制的基础上,引入RBF神经网络控制律,研究了机构在两种不同控制方式下的误差曲线.结果表明:基于RBF神经网络滑模变结构的闭环控制系统,其轨迹跟踪误差更小,自适应鲁棒性更好,在工程实践方面具有重要的参考价值.
