组网雷达分布式协同干扰仿真研究
2019-04-01杨会军
杨会军,李 强
(中国航天科工集团8511研究所,江苏 南京 210007)
0 引言
雷达网[1]把多部不同工作模式、不同频段、不同极化方式、不同体制的雷达适当布站,利用通信手段链接成网,由中心站统一调配而形成一个有机的整体,在战场上构成全方位、立体化、多层次的战斗体系,具有很强的生存能力和抗干扰能力。
本文针对组网雷达工作特点研究分布式协同干扰技术,基于分布式协同干扰仿真评估软件开展仿真研究,建立了组网雷达对抗数字仿真系统,可实现组网雷达功能级干扰仿真研究。
1 雷达组网方式
1.1 数据融合结构
组网雷达数据融合结构包括集中式融合、分布式融合和混合式融合三种。
1)集中式融合结构
集中式数据融合结构将各节点雷达检测到的目标量测值传递到融合中心,在融合中心进行数据对准、点迹相关、数据关联、航迹滤波、预测与综合跟踪。
2)分布式融合结构
分布式数据融合结构的每个节点雷达对其数据进行处理,产生局部多目标跟踪航迹,然后把跟踪结果及估计数据送至融合中心,中心根据各节点雷达的航迹数据完成航迹关联和航迹融合,形成全局估计。
3)混合式融合结构
混合式融合结构同时传输探测到的点迹信息和经过局部节点处理过的航迹信息,一般在大型融合系统中运用。
组网雷达融合结构性能比较见表1。其中,集中式融合结构估计精度高,但需要较大的通信带宽,同时计算量大,可靠性低;分布式融合结构对通信带宽要求不高、计算速度快、可靠性高,但联合估计和跟踪精度低于集中式融合结构;混合式是集中式和分布式的组合。

表1 组网雷达融合结构性能比较
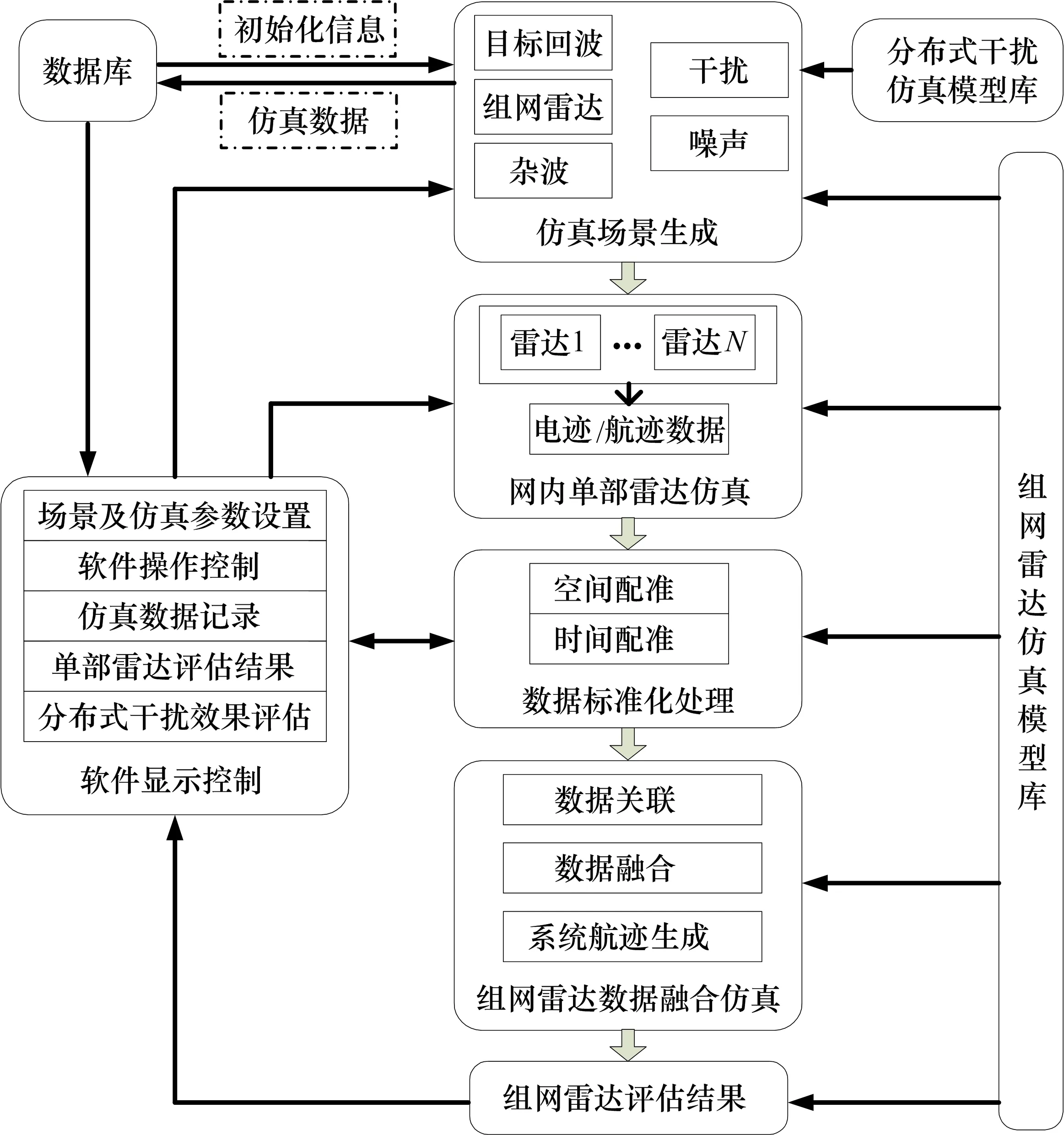
图1 组网雷达仿真系统构成
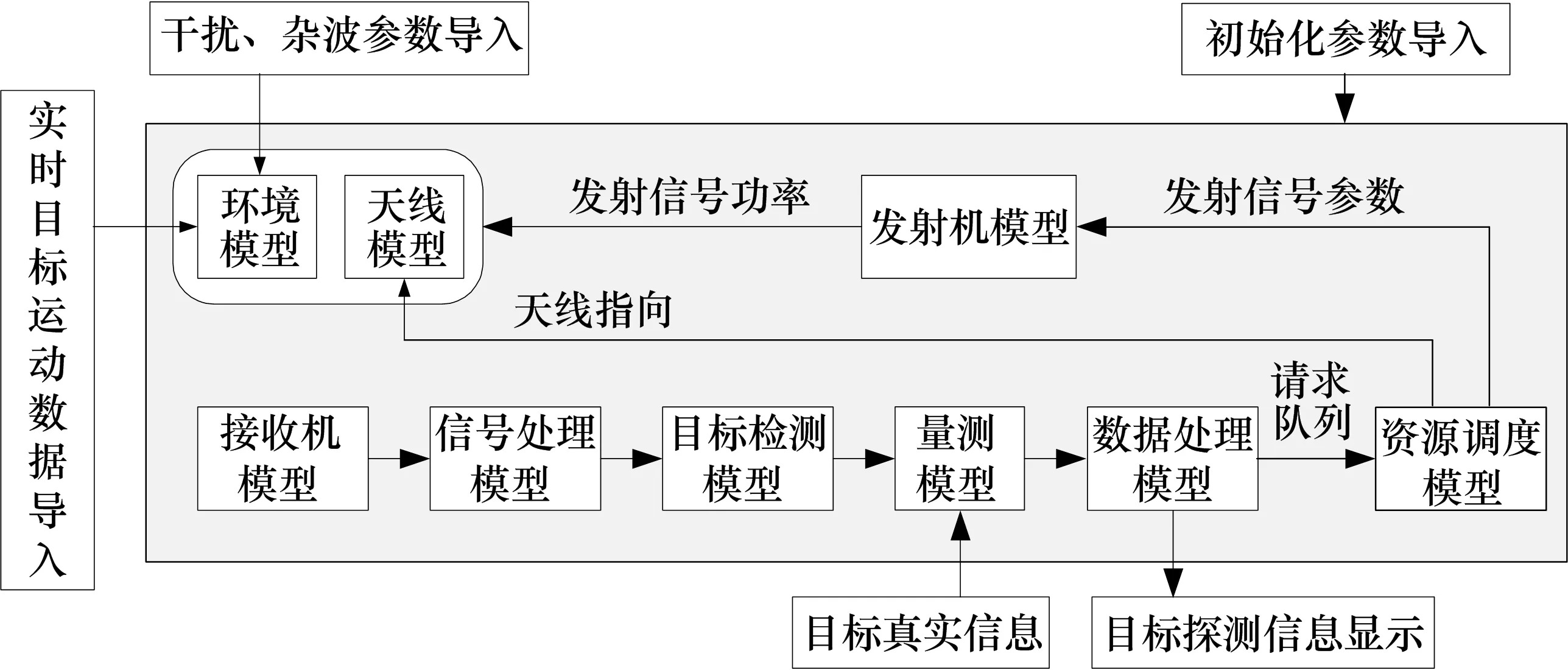
图2 单部雷达功能级仿真系统组成框图
1.2 数据关联算法
组网雷达数据关联是确定雷达接收到的量测信息和目标源对应关系的过程,涉及到三类关联问题:点迹-点迹关联、点迹-航迹关联和航迹-航迹关联。
1)点迹-点迹关联
通过在多个采样周期之间进行点迹-点迹关联,可以为新目标建立起始航迹提供初始化信息。新目标航迹起始应用于集中式融合结构的融合中心、分布式融合结构中的各节点雷达。在集中式融合结构中,在对点迹融合之前也需要进行“点迹-点迹”关联,以确定哪些点迹源于同一个探测目标。
2)点迹-航迹关联
为了更新航迹,维持跟踪的连续性,需要进行点迹-航迹关联以确定用于航迹修正的新观测数据。持续跟踪的过程同时存在于集中式融合结构的融合中心和分布式融合结构中的各节点雷达中。
3)航迹-航迹关联
在分布式融合结构中,为了对由多部节点雷达输出的多目标航迹数据进行融合,首先需要进行航迹-航迹数据关联,以确定哪些局部航迹源于同一个被跟踪的目标。
2 组网雷达数字仿真系统
2.1 组网雷达仿真系统组成
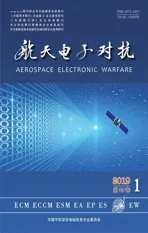
组网雷达仿真系统包括系统仿真模型库、仿真场景生成、显示控制三个部分,如图1所示。
2.2 单部雷达仿真系统模型
网内单部雷达功能级仿真系统的组成框图如图2所示。其完成的主要功能是接收外部系统传入的雷达初始化参数,以及外部其它系统导入的实时信息数据,还有目标的先验信息、干扰信息数据,进而仿真功能级的目标检测、搜索、多目标跟踪以及波束调度等功能。
2.3 组网雷达融合中心仿真系统模型
2.3.1数据标准化处理
在组网雷达信息融合系统中,各站雷达数据由各站分别获得。因而指挥中心所接收的远方目标情报受到指挥中心地理位置、工作时空的影响,具有时空相对性。对于一个雷达网系统而言,首先是单个雷达在各自的时间和空间系统内进行测量然后对各自的测量结果进行时间配准和空间配准,只有在统一的时间和坐标系统内才能进行多传感器的融合。
2.3.2数据融合模型
根据需求采用合适的融合结构:若各节点雷达工作在远程搜索模式,只能采用集中式融合结构;若雷达工作在中远程跟踪模式或中近程搜索跟踪模式,可工作在任意一种融合结构下;若组网雷达内各节点雷达工作在不同工作方式下,融合中心采用混合式融合结构,满足各雷达不同的融合需求。
2.4 组网雷达干扰模型
组网雷达干扰方式包括分布式噪声压制干扰、 密集假目标干扰、多假目标航迹扰乱干扰、分布式协同虚假航迹欺骗干扰、多点源相参干扰等。
1)分布式噪声压制干扰[1]
为了掩护某特定区域的目标或在某一地区内制造假的进攻态势,将众多体积小、质量轻、价格便宜的小型电子干扰机散布在接近被干扰目标的空域上,自动或受控地对选定的军事电子设备进行干扰。
2)密集假目标干扰
密集假目标干扰是指干扰机产生数量众多的与雷达发射信号相同(或相似)的干扰信号,使得组网雷达数据处理系统运算量加剧甚至过载,以期达到延缓数据处理速度、饱和跟踪能力和多航迹起始的目的。当组网雷达处在对目标跟踪起始阶段,可以使用密集假目标干扰。
3)多假目标航迹扰乱干扰
多假目标航迹扰乱干扰是指在雷达跟踪波门内产生一定数量的高逼真度假目标,使得雷达在进行点迹-航迹关联时出现关联错误,从而破坏雷达对真实目标的跟踪。当组网雷达已经对目标形成稳定跟踪,推荐使用航迹扰乱干扰,这样可以使航迹关联假目标点迹混批,使跟踪航迹变得不稳定。
4)分布式协同虚假航迹欺骗干扰[2-4]
组网雷达位置已知,多部机载干扰机在系统控制下协同飞行,每部干扰机干扰一部雷达,预先设置每部干扰机形成的虚假目标位置,使得网中各部雷达探测到同一虚假目标,从而对组网雷达产生有效的航迹欺骗。
2.5 干扰评估模型
研究组网雷达干扰效果评估方法,建立组网雷达干扰效果评估指标体系、评估准则,组网雷达干扰效果评估指标包括威力范围、检测概率、自卫距离、欺骗概率等,建立干扰效果评估系统模型。基于评估结果对干扰样式、干扰参数进行优化设计。
3 组网雷达干扰仿真
3.1 对抗场景
以分布式协同虚假航迹欺骗干扰为例进行组网雷达干扰仿真研究。首先预设假目标运动轨迹,由于各个时刻干扰机必在雷达和假目标位置的连线上,结合假目标和干扰机运动学规律,设计出每部干扰机可行的运动轨迹。只要设计使假目标航迹和干扰机航迹满足各自的运动学特性,这样就可以对组网雷达形成一条相关的虚假航迹。对抗场景如图3所示,雷达1、雷达2以集中式方式组网工作,战机1、战机2携带自卫式干扰机,两部干扰机协同工作,在组网雷达融合中心形成稳定逼真的假目标航迹。
图3 分布式协同虚假航迹欺骗干扰示意图
3.2 参数设置
雷达1位置为(0 km,0 km,0 km),换算到经纬高坐标系下为(123°,30°,0 m)。雷达2位置为(0 km,100 km,0 km),换算到经纬高坐标系下为(123°,30.90°,787.15 m)。2部雷达同构,信号带宽20 MHz,波束宽度1.25°。
2架目标飞机携带自卫式干扰机匀速飞行,对组网雷达实施虚假航迹干扰,产生一条初始位置为(123.7118°,30.2374°,5 km)、速度矢量为(200 m/s,100 m/s,4 m/s)的虚假航迹。
3.3 仿真结果
设干扰机1、干扰雷达1,干扰机2、干扰雷达2,2部干扰机协同工作产生航迹欺骗干扰。初始时延60 ms,仿真步长1 s,仿真时间为1~100 s。图4、图5分别给出了2部雷达的探测结果。
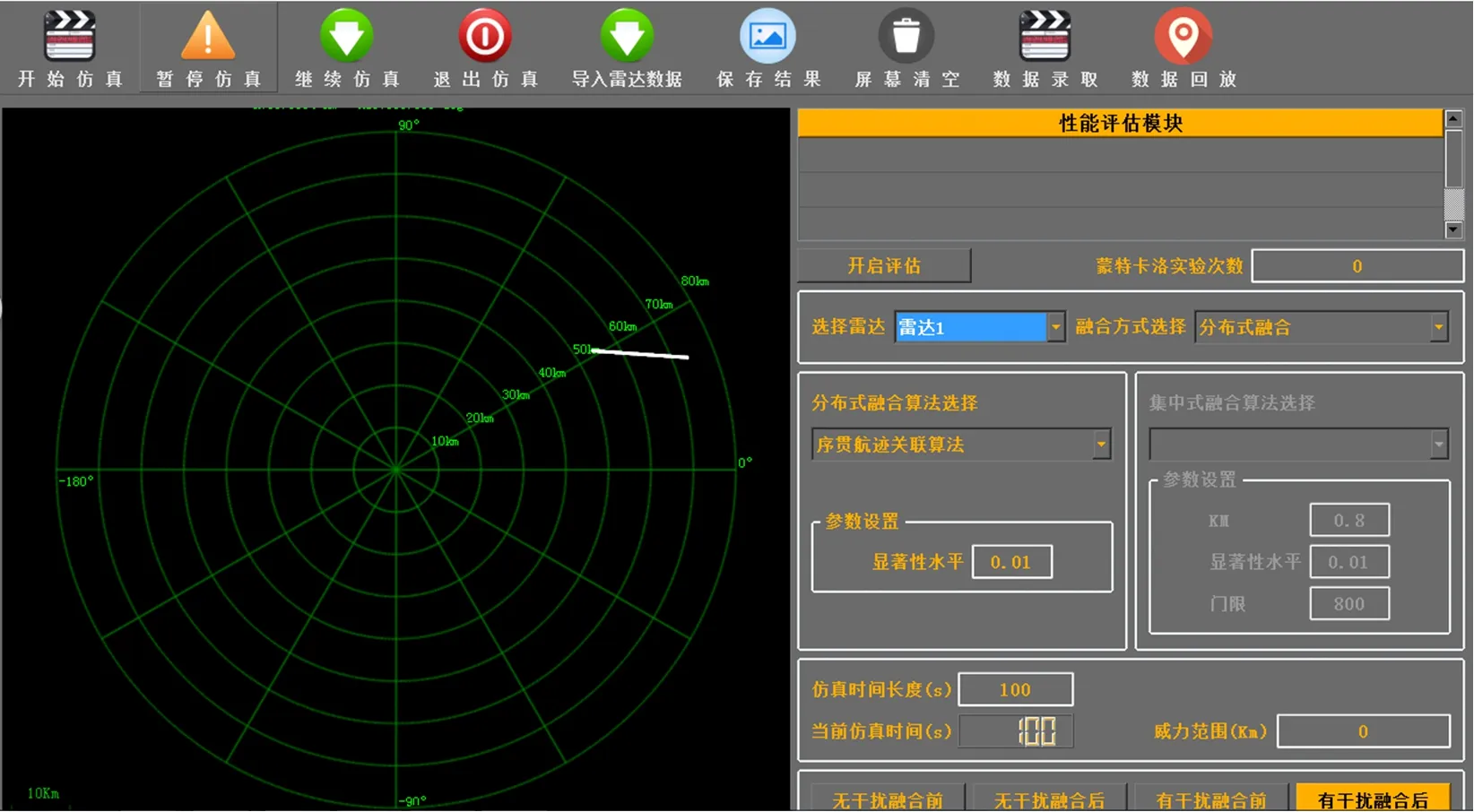
图4 雷达1探测结果
雷达1和雷达2分别对虚假目标进行跟踪,得到虚假目标航迹。将2部雷达得到的虚假航迹传输到数据融合中心进行航迹关联检验,采用序贯航迹关联算法,数据融合中心航迹关联结果如图6所示。由图6可知,产生的虚假航迹可以通过数据融合中的航迹关联检验,被误判为真实航迹。
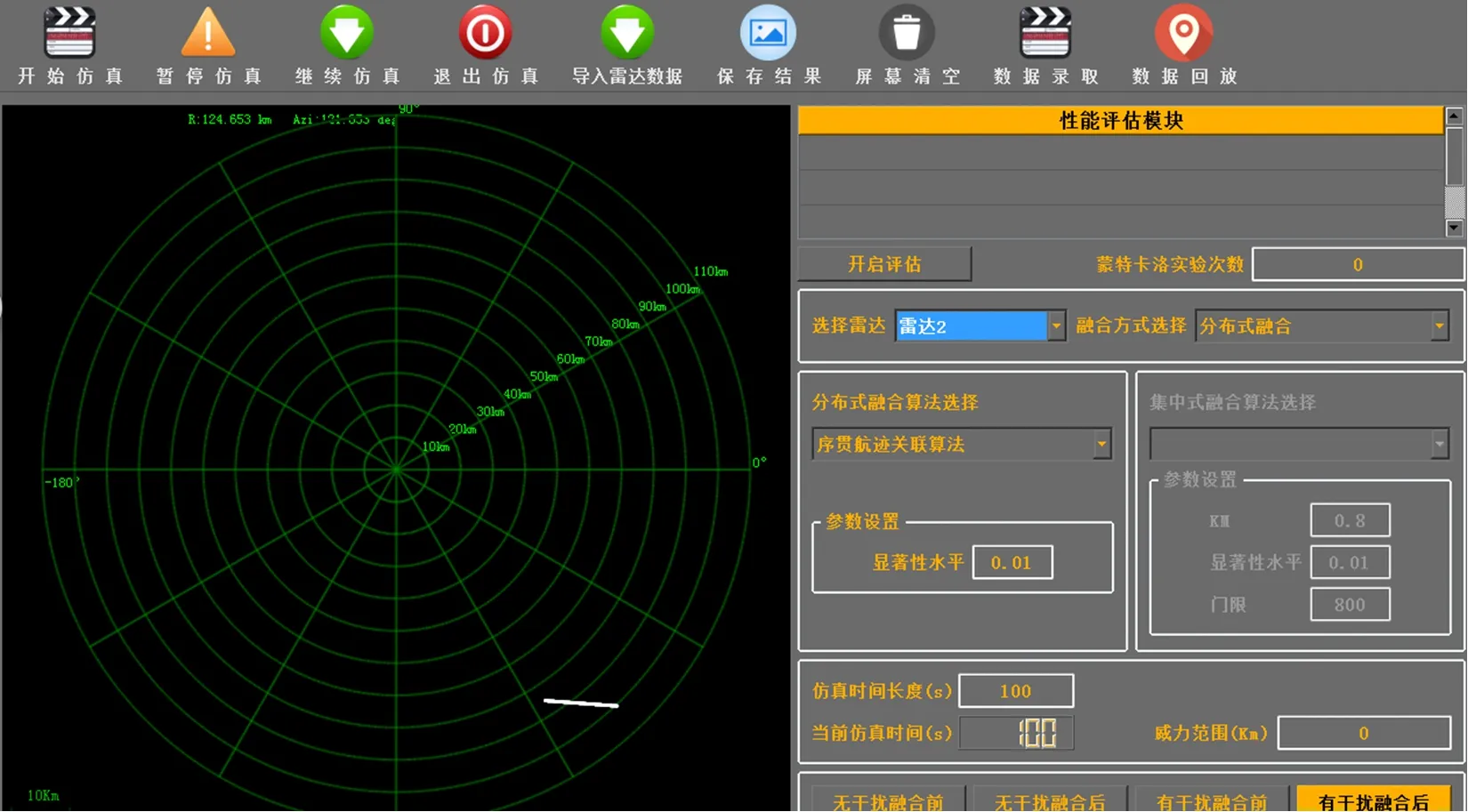
图5 雷达2探测结果
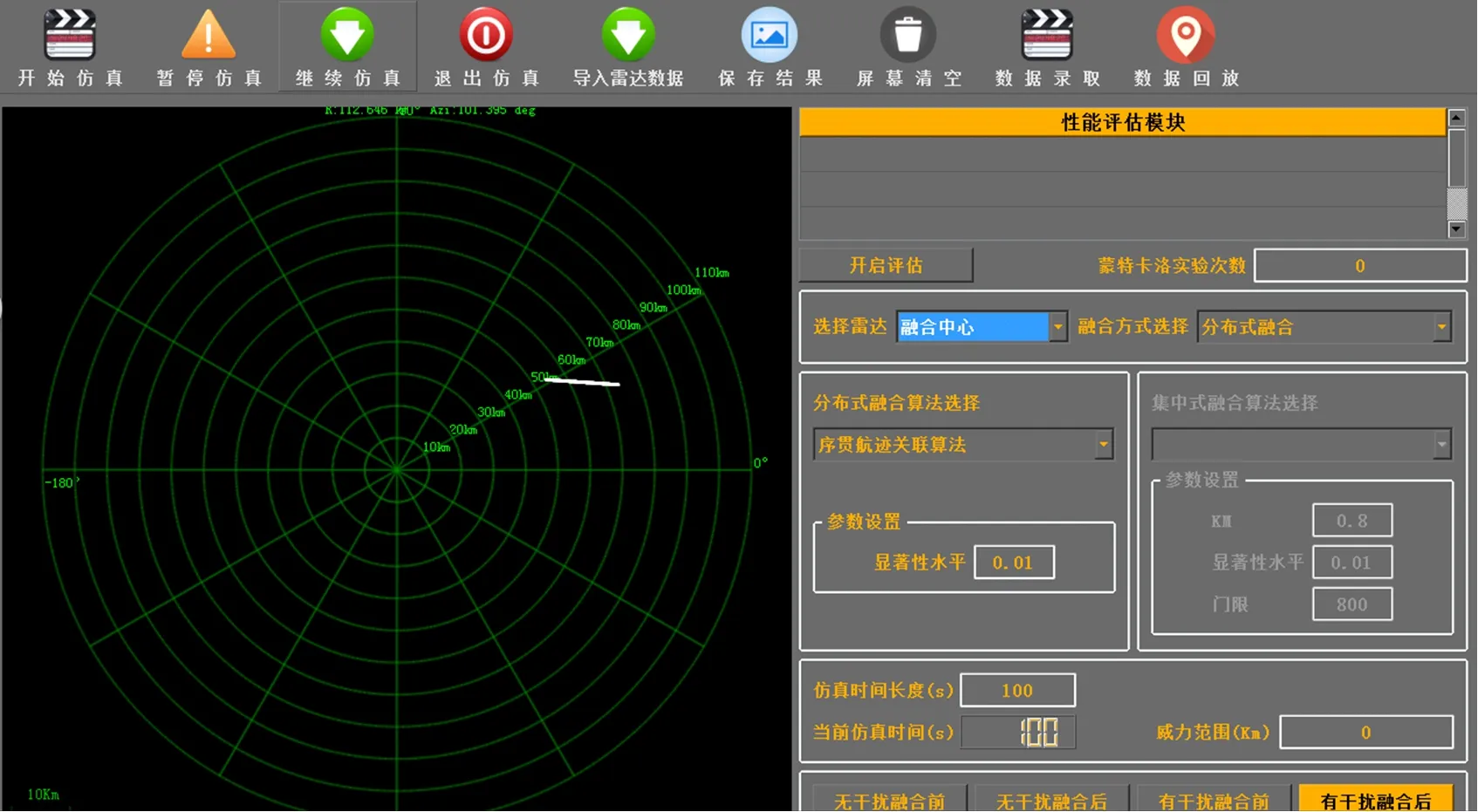
图6 融合中心航迹关联结果
如果干扰机获取的雷达位置不精确,设定位误差为500 m和700 m,干扰机对2部雷达产生的虚假航迹在数据融合中心进行双门限航迹关联检验,进行100次蒙特卡洛实验,在500 m的定位误差下,虚假航迹仍被误判为真实航迹,但关联距离进一步变大;在700 m的定位误差下,虚假航迹有一定的概率判断为假航迹,被成功剔除。
因此,分布式协同虚假航迹欺骗干扰要求干扰机具有更强的信号分选识别、 定位以及计算处理能力,在有些情况下需要外在的信息支持,才能通过组网雷达融合中心的航迹关联检验,产生欺骗干扰效果。
4 结束语
雷达网利用数据链或者通信网络,把特定区域内的雷达链接成网,具有很强的生存能力和抗干扰能力。本文以组网雷达为对抗目标,研究组网雷达干扰仿真技术。分析了组网雷达的工作方式及特点,给出了组网雷达仿真系统的组成及模型,建立了组网雷达对抗数字仿真系统,系统可实现组网雷达功能级干扰仿真研究。■