水下传感器网络节点部署对定位性能影响研究
2019-03-28鄢砚军徐慧慧
鄢砚军,徐慧慧,何 胜
(1.中国人民解放军91892部队, 海南 三沙 573100; 2.武汉大学 电子信息学院, 武汉 430072)
随着丰富的海洋资源被不断发掘,世界各国对海洋权益的争斗愈演愈烈,各种先进的水上装备被成功研发并投入到海战场。传统的海洋观测通常高度依赖固定系声呐设备、海洋研究船、舰艇,但在广阔的海域内,上述设备的预警监控范围显得较为渺小,空中预警机、雷达和卫星可以高效完成海面观测,却难以穿透水体。而在当今信息化战争的背景下,水下无人潜行器UUV(Unmanned Undersea Vehicle)[1]、无人探索系统AUSS (Advanced Unmanned Search System)、水下机器人AUV(Autonomous Underwater Vehicle)[2]、水下推进器、蛙人运载器、潜艇或潜射无人机等水下设备的隐身性能、伪装手段和反侦察能力越来越先进,现有的侦察设备越来越难发现水下目标。在军事斗争准备上,对水下目标的监控需求越来越迫切,受到各级部门的高度重视。在这种需求下,世界各国纷纷开始研究成本低、续航工作时间长和高可靠性能的水下传感器网络。
水下传感器网络节点部署是首要的研究内容,与水下网络的完整性、连续性、时效性和定位精确性息息相关。优化的节点部署可以提高工作性能、降低成本费用,大幅度延长传感器的使用寿命。
受水的阻碍作用影响,水下节点不能直接使用GPS定位,水下通信带宽范围小,水下电池更换难度大,节点会在水流下移动,这些因素给水下传感器网络造成较大的困难和挑战。
针对未来海战发展需求,本研究围绕三维水下传感器节点部署对定位性能的影响,研究了不同水下节点部署对定位性能的影响,通过仿真对比,得出正四面体部署为最优化部署的结论。
1 水下传感器网络
水下传感器网络 (Underwater Wireless Sensor Networks,UWSN)是指将传感器节点部署到水下,利用水下节点建立起的网络。该网络通过传感器感知水下的各种信息,按照一定算法运算后将信息传输到水面节点,水面节点再将监测信息传输给监控中心或卫星,如图1所示。网络中水下节点主要分为三种,第一种是水面sink节点,该节点部署在水面上,装备了GPS装置并具备无线电通信功能,能借助GPS实现自身定位及同步,还能与水下节点通过水声实现通信与同步。第二种节点是水下sink节点,该节点悬浮在水中,与其他节点的通信只能依靠声通信方式,该类节点具有探测和感知能力,负责数据的接收、融合和转发。第三种节点是海底信标节点,该节点用锚链固定在海底,它的功能与潜标节点功能相同[3]。其目的主要是:通过部署水下传感器节点,实现对监控海域的海洋水文环境监测、目标识别和侦察预警。

图1 水下传感器网络三维图
按水下节点的类型划分,锚节点分为静止和移动锚节点[4]二大类。按照定位测距过程划分,分为距离相关和距离无关的定位算法。典型的距离相关的算法包括利用TOA或TDOA测距、利用AOA或RSSI测距。
RSSI测距是计算信号在传播过程中的损耗,通过运算将传播损耗换算成距离计算。由于RSSI借助的水下节点较少,水下节点平均能耗低,基于RSSI的测距应用比较广泛。RSSI属于静态锚节点定位算法,静态锚节点算法还有RSSL 算法[5],SDP-SOCP 算法[6],NANCL算法[7], RLS算法[8]等;移动锚节点定位算法有HILBERT算法[9],LS 算法[10],SANS算法[11]等。文献[12]中水下节点被随机抛撒在海洋中后按照水流运动,利用锚节点在未知节点平面上的投影点进行定位,利用到达时间差来计算距离。该算法能量利用效率高,对时间同步要求低,但是定位所需时间较长,覆盖率比较低。文献[13]提出了一种上下移动定位算法,在上下移动过程中锚节点发出广播定位信息,未知节点接收这些信息后,使用最小二乘法来计算自己的位置,该算法定位能量消耗少,但定位误差较大。
2 问题描述
单一水下传感器监测范围小,达不到战略监控和环境监测的目的。而要实现对大范围海域,比如对12海里的领海基线海域进行全时段自动预警监测,需要组建水下传感器网络。水下传感器网络由布设在水下的传感器节点构成,感知的信息经一定算法处理后,由水下节点将信息传递给水面节点,再传递给卫星或监控中心。该网络具有基础设施简易、节点体积小、设备成本低、生存能力强、定位精度高等优点。在军事领域,布设水下传感器节点需要解决以下问题。
1) 要达到一定的战略监控目的,需要监测范围足够大的海域,由于要考虑整个网络的成本,这就要求水下节点越少越好。
2) 由于规模较大,通常部署在无人置守的区域,部署后节点补充能量较为困难,这就要求定位算法必须考虑能量问题。
3) 要达到一定军事目的,需要对目标的定位精度足够高,定位时间尽量短,传递数据尽量快。
4) 要全面反映监测区域的实时情况,防止出现监控盲区,需要监测覆盖率足够高。
为了便于分析和计算,给出以下假设:
1) 水下流体有一定的运动速度,流体的流速相对于声音在水下传递的速度为极小,假定声音在水下传递不受流体流速影响。
2) 浮标节点和水面节点会随海流、重力等因素影响而产生一定位移,相对于节点之间距离很小,假定各节点位移保持不变。
3) 假定在监测范围内每个节点都可以准确估计它相对于其他网络节点的位置。
4) 由于水下节点传感系统、控制系统能量消耗相对接收、发送信息为极小,假定水下节点使用寿命主要由接收和发送信息的能量消耗决定。
5) 由于水声信号传播速度与海洋的关系式为
v=1449.2+4.6T-0.055T2+0.000 29T3+
(1.34-0.01T)(S-35)+0.016z
其中:v为传播速度;T为温度;S为盐度;z为深度,便于计算,本文进行简化处理,假定声音在水下速度为定值。
3 水下传感器网络定位算法
水下传感器网络水下节点部署分为受控、移动和随机部署三种。受控部署是将水下节点部署在相对确定的位置,本文研究的内容是受控部署。对水下未知节点进行定位常用多边定位测量法,定义两个节点之间距离为边,多边定位算法即计算未知节点与其他节点之间的距离,经迭代运算后确定未知节点的位置。
3.1 四边测量法
在三维空间,至少需要4个节点才能对未知节点P进行定位,如图2所示。设A,B,C,D四个锚节点的坐标分别为:(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),(x4,y4,z4),P点坐标为(x,y,z),它们到P点的距离分别为d1,d2,d3,d4,其中节点间的距离采用RSSI方法计算,计算方程组为:
(4)
经计算得出未知节点的坐标为:
(5)

图2 四边测量算法
3.2 定位过程
当采用四边测量法对未知节点进行定位时,由于水声环境的影响,RSSI方法测距的误差会导致定位精度下降,但是与其他部署方式相比,节点按正四面体部署时的定位精度最高,定位算法流程如图3所示。
1) 锚节点周期发送自身信息:节点 ID、自身位置信息。
2) 未知节点接收到多个这样的消息后,记录锚节点的 RSSI 值,利用水声信道模型计算节点间距离。
3) 任意选取 4 个锚节点,计算未知节点到4个锚节点的距离,并判断4个锚节点位置是否是正四面体。对每一组符合条件的锚节点分别计算未知节点的位置。
4) 综合计算,对集合中所有计算的位置取平均值,得出未知节点的位置估计。

图3 定位算法流程
3.3 定位精度分析
水下传感器网络获得未知节点与锚节点之间的距离采用的是RSSI方法,但是RSSI 受环境影响较大,在水中声信号有可能受到水的密度,水中其他生物等影响,发生信号强度衰减不规则或者信号散射等现象,所以此方法存在一定误差,假设测量距离误差范围在(-ε,+ε)之间,对未知节点定位相当于求出以四个锚节点为球心,到未知节点距离为半径的薄壁圆球(薄壁厚度为误差值)相交区域的坐标,用NX软件进行模拟,效果如图4所示。
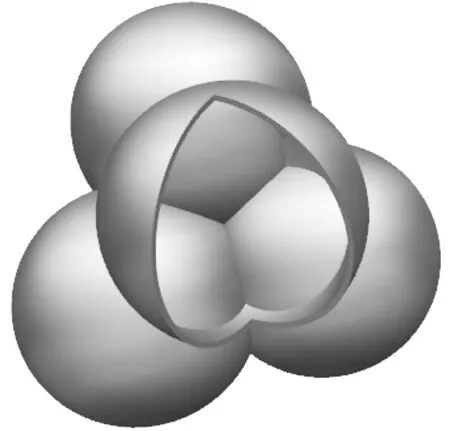
图4 薄壁圆球相交

其误差区域表示为:

(6)

图5 锚节点的定位误差区域

(7)

图6 定位误差分析
设四面体中各个面的直线夹角分别为a1,a2,a3,…,a12,误差区域由12个如图6所示的APiPPj区域组成,设αi(i=1,2,….,12)是向量PPi与PPj(i=1,2,3,4,j=1,2,3,4)的夹角。
则定位误差为:
(8)

(9)

以上分析得出,按正四面体部署,算法定位误差最小。
为验证理论的正确性,通过Matlab验证四面体各面均为等腰三角形部署方法对定位误差的影响,等腰三角形底角从起始20°增加到80°,其等腰三角形底角与定位误差的关系如图7所示。

图7 角度变化与定位误差的关系
从图7可以看出随等腰三角形底角角度增加,定位误差先逐步减小,后缓慢增加,当角度为π/3时,定位误差最低,与推导公式相符。
为进一步验证节点按正四面体部署方法的定位精度与其他四面体部署方法的对比,本文重点分析水下节点按直角四面体和等腰直角四面体部署时的定位误差。直角四面体和等腰直角四面体部署方法分别如图8所示。
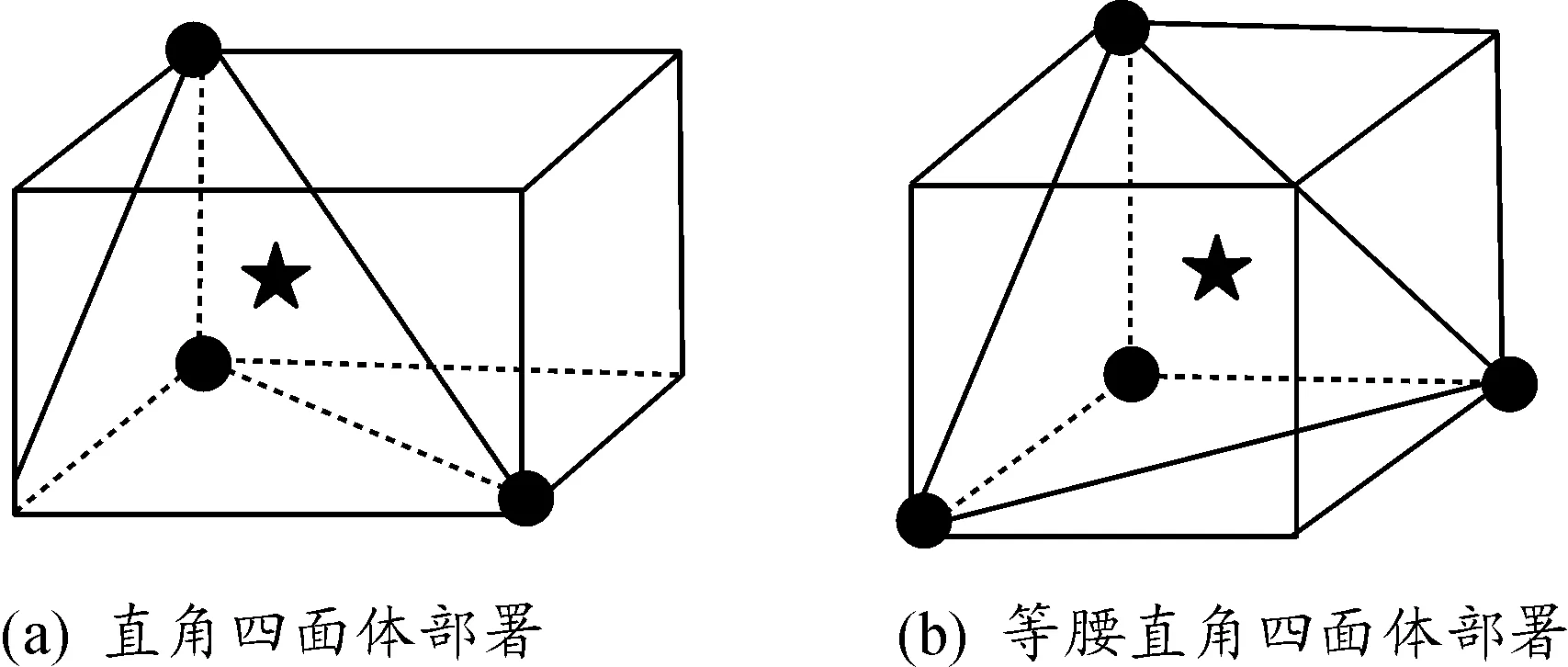
图8 三维网络部署图
当水下节点按照直角四面体部署时,接收的四个信息包位置的夹角分别是:
α1=30,α2=60,α3=90
α4=30,α5=60,α6=90
α7=30,α8=60,α9=90
α10=30,α11=60,α12=90
当水下节点按照等腰直角四面体部署时,接收的四个锚节点位置的夹角分别是:
α1=45,α2=45,α3=90
α4=45,α5=45,α6=90
α7=45,α8=45,α9=90
α10=45,α11=45,α12=90
依据式(8),其定位误差为:
对比直角四面体,正四面体部署定位精度提高为:
(1.421πε3-1.155πε3)/1.421πε3=18.71%
对比等腰直角四面体,正四面体部署定位精度提高为:
(1.365πε3-1.155πε3)/1.365πε3=15.38%
上述分析可以得出,按正四面体部署时定位误差明显小于其他两种部署方法。
4 仿真分析
为了比较不同部署方案的定位误差,本研究用Matlab进行模拟仿真。模拟6 000 m×6 000 m×6 000 m的正方体水下区域,传感器通信半径1 800 m,随机放置40个目标,传感器节点总数从9变化到49,同时保持锚节点的数量相同。仿真中考虑了锚节点数量9、16、25、36到49个的5种情况,模拟结果为100次的平均值。图9为正四面体部署结构。

图9 正四面体部署结构
仿真反映定位平均误差,平均定位误差计算式如下:
(10)
其中Nl是局部普通节点的数量,(μi,νi,wi)是节点的实际坐标,(xi,yi,zi)是节点的估计坐标。图10反映了三种不同部署方法的定位误差。
从图10可以看出,随锚节点数增加,三种部署方案定位误差均有所减小,定位误差增幅逐渐减小,当水下节点增加到一定数量时,三种部署方法的定位误差基本不变。图11中可以看出随水下节点的增加,三种部署方案的覆盖率增加,增加幅度逐步减小,增加到一定数量时,覆盖率达到100%,总体来说,在同等条件下,正四面体部署方案性能最优。
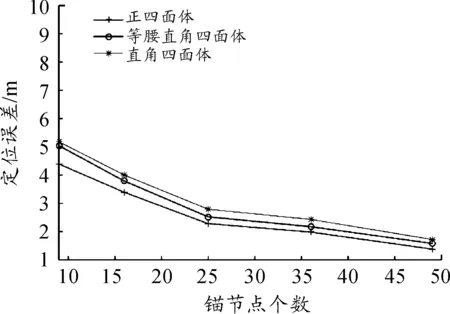
图10 不同部署方法下定位误差

图11 不同部署方法下定位覆盖率
新一代的水下网络功能更加多样,将PH传感器、温度传感器和水质组合等传感器应用到水下传感器网络中,能够对海洋环境进行监控,提供一个海洋监控管理的信息平台,实现军民融合战略发展的目的。但要将其实施到战略层面还有许多问题函待解决。
1) 岛礁水下预警监控
水下无线传感器网络通信距离已能达到5海里,岛礁周围海洋深度一般不超过2 000 m,按照联合国海洋公约法规定的12海里的领海基线,结合本文提出的部署方法,设置16块水下无线传感器就能对岛礁领海线内水下进行预警监控,监测出闯入岛礁水下设备的位置和深度。
2) 水下传感器节点部署方法
优化的部署水下传感器节点能大幅度提高网络的整体性能,但在真实环境中水下节点的部署问题上,还没有形成系统的理论和有效的方法,快速、精确、有效地按节点部署是形成战斗力的关键。
3) 水下监控平台
利用现有的科学技术,将水下传感器网络节点直接显示在海图中,与海图融合形成系统的水下监控平台,构建出水下网络体系作战平台。一旦水下目标闯入监控区域,其位置信息能直接显示在海图中,指挥员或监控人员能直接读出其位置等相关信息,便于指挥员快速形成决策。还可以利用水下传感器网络组建水下声通讯网络,为潜艇通信形成一个水下通信连接基站,提升潜艇的作战能力。
5 结论
本文通过理论推导、仿真研究得出了水下传感器网络节点不同部署对定位性能的影响,得出了正四面体部署定位性能最优,但水下传感器网络在国内实际应用例子不多,水下组网实验数据较少,定点布设技术还不成熟。
