梵净山保护区样地三维可视化系统设计与实现
2019-03-09张维勇翁福洲白少博曹江雄
张维勇,黄 鹤,翁福洲,白少博,曹江雄,石 磊
(1.梵净山自然保护区,贵州 铜仁 554400; 2.北京建筑大学,北京 102616; 3.中图地理信息有限公司,北京 100054)
目前,随着我国对林业的重视以及测绘新技术的不断发展,很多高校和研究院所正在研究精准林业。由于我国在林业测绘以及多源数据处理技术相对滞后,导致了林业测绘从仪器设备、数据处理到技术理论一般要滞后于其他测绘行业5~10 a,特别是林地样木监测和后期信息维护差距较大,所以说我国在林业测绘上还谈不上精准[1]。在数据采集方面仍多沿用传统的静态测量手段,用皮尺等测量树干胸径,在树很高时还需要攀爬或是将树伐倒才能进行测量,测量冠长、冠幅等样木参数也很困难。传统的测量方法破坏性较大,费时费力。同时针对多源样木信息的数字化管理也并没有一套完善的技术体系,存在样木信息丢失、后期入库数据冗余、三维可视化效果单一、无法全方位对样木信息进行叠加分析等问题。随着测绘科学技术的发展,现近测绘技术逐渐应用于林地测绘相关工作,如倾斜摄影测量技术可以为林地样木长势、健康状况分析提供依据;激光点云可以用来拟合样木的胸径,方便后期针对性管理样木等,这些都是其他技术手段无法替代的。与此同时,如何管理维护大量结构复杂、多源异构的样木测绘数据,提高它们的可视化效果也是一个亟待解决的问题,而多源样木数据的展示维护过程复杂,仅仅依靠人工管理难以在短时间内完成并保证正确性。因此搭建样地样木数据管控平台对样木数据进行统一入库管理,以期实现更好的人机交互效果势在必行。
1 梵净山保护区样地管理现状
本研究选择梵净山保护区林地样木作为观测对象。该保护区位于贵州省东北部铜仁市的江口、印江、松桃三县交界处(地理坐标为东经108°45′55″~108°48′30″,北纬27°49′50″~28°1′30″),位于我国云贵高原向湘西丘陵的过渡带,是武陵山脉的主峰,保护区总面积43 411 hm2,处于我国亚热带中心,具有我国典型中亚热带季风山地湿润气候特征。特殊的地理位置和优越的水热条件,形成山区温暖湿润的环境,加之山体古老,地质史上少受冰川影响,这里成了古老动植物的栖息地。据统计,保护区内有原始森林2万公顷得到有效保护,已查明区内生物种类6 000多种,并分布有大量的珍稀濒危野生动植物,其中以珙桐为代表的国家一级保护植物6种,以黔金丝猴为代表的国家一级保护动物有9种。另外,国家二级保护动植物物种共计52种。梵净山丰富的物种资源为生物物种多样性研究和保护提供了绝佳场所。本文利用无人机、三维激光扫描、360°全景技术采集样地样木数据,并以此为基础建立信息化数据库,通过DEM胸径树高提取、图属关联、多维度索引等三维GIS技术实现梵净山多源样地样木测绘数据管理平台的研发,为样木数据的存储管控、三维浏览提供技术保障。
2 测绘新技术及数据采集处理
2.1 无人机
倾斜摄影测量是一项新型航测技术,一般采用无人机搭载倾斜相机同时从一个垂直、四个倾斜等五个不同角度进行影像采集。不但能够获取建筑物的顶部信息,还可以同时获取建筑物的侧面信息,从而更全面的反映目标物体的真实情况。作为近些年测绘领域新兴的数据采集平台,无人机已经开始逐渐取缔传统的测绘手段。在航空测量中,无人机依据其机动灵活的作业优势,能够实现内外业有效结合,优势互补,有效提高外业测绘的工作效率,满足人们对三维信息的需求[2]。
为了更直观体现梵净山样地的整体性,本研究采用小型无人机以倾斜摄影的方式采集样地影像数据,并利用相关建模软件建立样地三维模型。机型是配置有自发研制的5镜头的大疆精灵4无人机,能够同时从五个不同方位采集影像以模拟倾斜摄影过程。所用设备如图1所示。

图1 五镜头消费级无人机
本次拍摄的梵净山实验样地大约为30 m×30 m范围,最大高差约为10 m。在飞行任务前,进行航线规划。为了达到较好的建模效果,设置航高为50 m,航向重叠度为90%,旁向重叠度为80%,且将飞行区域外扩一航带(图2)。完成航线设计后即执行飞行任务。在任务执行过程中通过软件系统实时监控无人机的飞行位置、飞行速度、飞行高度,以及相机传感器的拍摄画面。样地高空影像数据采集共耗时1 h左右,影像数量为612张,大小为2.3 GB。完成飞行任务后,检查是否有航摄漏洞,如果出现要及时补拍。最后采用Context Capture软件对获取的影像进行处理。经过添加照片、空三处理、模型重建、生成产品等相关步骤得到样地的三维模型。

图2 航线规划示意图
2.2 全景
全景技术是近年来涌现的新型虚拟现实技术,该技术采用基于图像的渲染方式,利用全景图像以立方体、柱面或球面投影的方式实现了一种伪3D效果,具备成本低、实现方便、展示效果逼真等优点[3]。相比于单一图像视角的缺陷,全景图像包含了360°环视视角内容,给管理者带来全方位的视觉体验。基于上述优势,全景技术很适合大型工程项目的展示,已在旅游景点、房产推介等领域得到了广泛应用。本试验样地位于梵净山视野开阔的山腰,样木空间分布规律不明显,因此,相比于采集车等大型设备,一个简易的便携全景相机适用性更强。本文所用的全景相机由6个GoPro运动相机自行组装而成,可同时拍摄同一站点不同朝向的6张鱼眼影像。利用PTGui软件通过手动添加控制点的方式将拍摄的原始影像进行投影拼接,形成等距圆柱投影,最后使用Krpano全景制作插件对生成的全景图进行分割、加工,制作出全景漫游即可在本地分享浏览,也能上传到服务器发布成网页,利用前端语言HTML5在漫游中根据需要加入一定的属性信息,主要包括:(1)无缝过渡场景;(2)样木的动态地标并始终显示文字;(3)完善样木属性信息,并将其显示在漫游系统中;(4)添加自定义鹰眼图。全景相机和样地整体漫游界面如图3、4所示。

图3 全景相机

图4 样地整体漫游
2.3 三维激光扫描
新兴的三维激光扫描技术能够通过记录物体表面大量点的三维信息、颜色信息以及反射率信息进行三维模型重建,并将完整的模型储存到电脑中,后期应用于不同领域。传统的获取树木直径数据是通过软尺测量树木周长,再通过计算而得,这种方法比较繁琐,而且受测量手段的局限误差大,只能保存单一的数据,既费时,又费力。本项目基于梵净山样地保护的三维激光点云对相关样木的直径进行了提取并在后期系统中展示保护区样地中树木三维激光点云模型。本次外业数据采集利用Riegl公司vz-2000三维激光扫描仪对样地扫描,在扫描前踏勘样地,大致确定需扫描的界限、路线以及架站和标靶的位置。布设标靶的现场环境如图5所示。

图5 测量现场控制标靶示意图
从采集数据到得到树木点云模型和胸径、树高等信息,大致可分三个步骤。
2.3.1 扫描 在现场直接对样地树林扫描,扫描前均匀分散放置标靶。扫描过程中使用扫描仪自带的尼康照相机拍照,为建立内业数据模型获取更多的颜色数据。
2.3.2 数据处理 内业使用扫描仪自带的数据处理软件RISCAN对采集的点云进行处理。处理的步骤为:①手动初步拼接和软件精密拼接,粗拼精度不超过2 cm,后期精密拼接精度控制在2~4 mm之间;②导出pts格式点云数数据;③通过CloudCompare点云处理软件对最终数据进行切割去噪。
2.3.3 点云数据及样木参数 样木点云参数提取的前提是确定单株样木的位置,本文利用Hough变换算法识别单木,进一步提取样地点云数据中样木的胸径,并通过分层计算单株样木不同切片的点云个数,拟合树高,并将最终的拟合结果应用于后期平台展示。具体算法与流程如图6。

图6 Hough变换算法流
(1)点云高度归一化
样木位置与胸径的提取需对同一高度的样木点云数据进行切片处理。
在此将不同高度的样木进行归一化处理。首先,将样地点云数据生成0.1 m×0.1 m的DEM网格,统计出每个网格的高度值Zi;然后将所有点云的高度减去相对应DEM网格高度,即可将样地内不同高程的样木数据归算到高程为“0”的平面上。
(2)分层栅格化
由于保护区内灌木较多,在原始数据采集时对样木有一定的遮挡,不利于后期胸径的拟合,所以,此处以拟合的DEM平面为基准,在IDL中从1.5 m处往上对树干点云数据进行分层,层间距0.3 m,单层厚度10 cm,共分11层。并将分层后的数据以0.05 m×0.05 m的分辨率进行栅格化,最后根据每个体元内的回波点个数确定像素灰度值。
(3)Hough变换算法进行圆拟合
由于本次扫描单株样木胸径在5~50 cm范围内,所以检测半径从2 cm开始,直到25 cm结束,步长为1 cm。根据样地内样木分布的实际情况,把样木胸径处实际距离小于50 cm的认为是同一株单木[4]。识别出单木后,根据每一层点云数据中存在的多个圆心与半径拟合出胸径,做法如下:计算单株样木不同高度处切片对应的所有圆心坐标的离散程度,删除阈值小于5 cm的圆心坐标距离对应的圆心及其半径,在剩余圆心及半径中取距离各自圆心大概0.96~1.04倍半径范围内的点云参与圆心O(x,y)平均值的计算,并将所有范围内点云到圆心距离的平均值设为这层圆的半径。获取每层的圆心及其对应的半径后,可取1.4~1.5 m处计算的圆直径为胸径。Hough变换算法拟合前后的胸径点云如图7、8所示。
Hough变换算法计算得到多层树干处的圆心可以拟合出一条直线,以距离直线一定范围内的点云为基础进行树高提取,即:以0.1 m厚度对点云数据进行垂直方向上的分层,自下而上遍历每层点云数量并进行计算,若第n层开始,连续5层的点云数量均小于10,则树高H=0.1 n,树高如图9。
3 系统设计与实现
3.1 系统整体框架设计
作为一个以多源样木测绘数据为基础的数据管理平台,本系统采用多层次C/S开发模式,逻辑上可分为用户层、应用层、数据引擎层、基础数据层。系统的设计在功能上满足以下需求:支持多源样木数据的统一入库并依据索引建立空间相对管理; 通过相应的图属关联对建库数据进行快
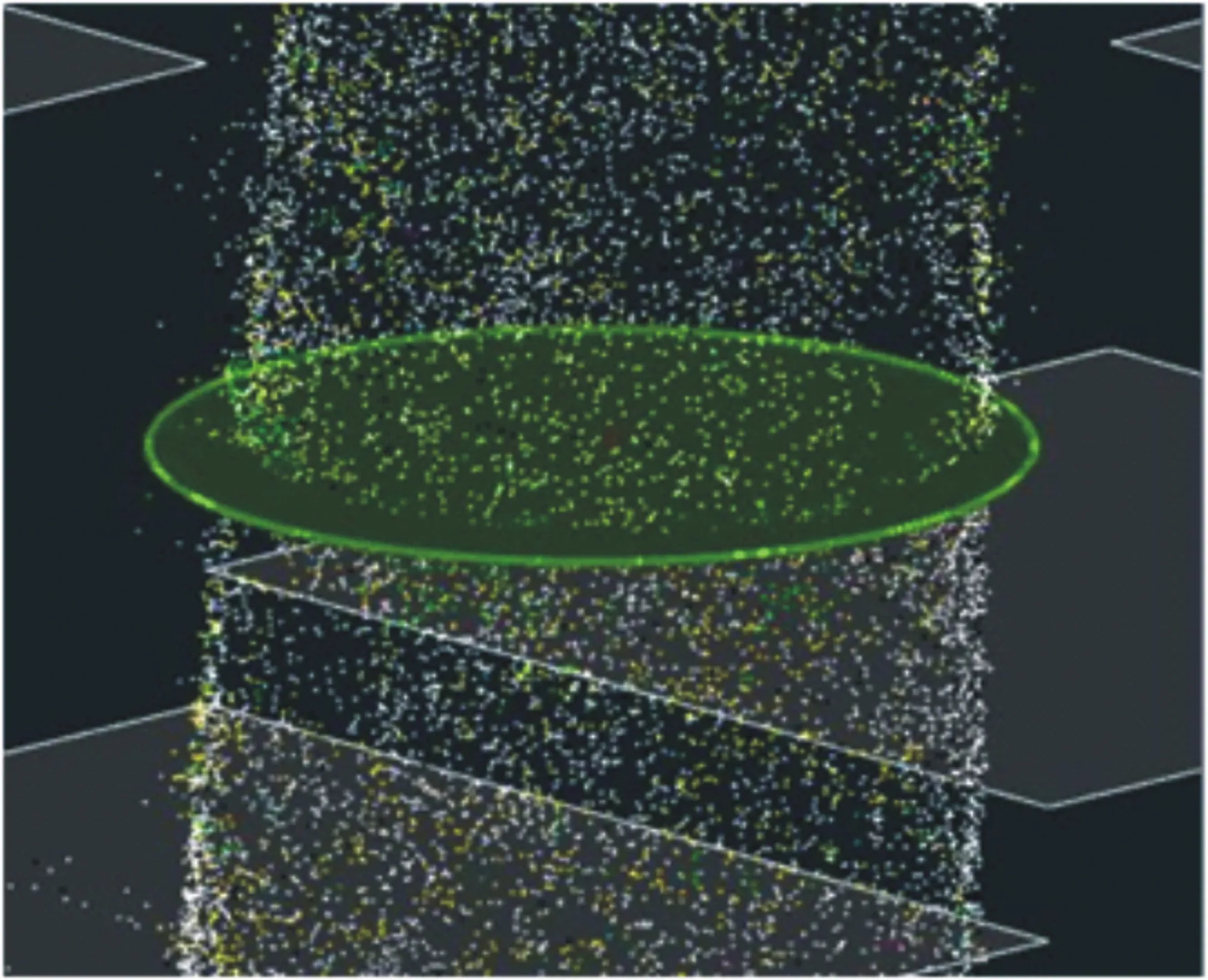
图7 胸径处原始点云
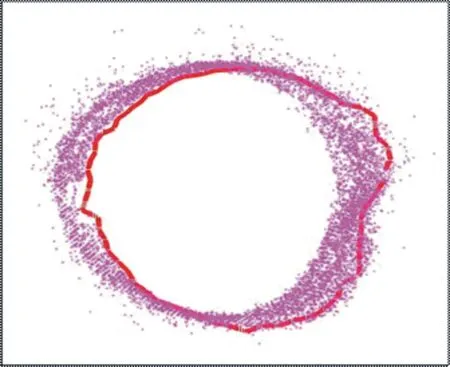
图8 Hough变换后胸径处点云
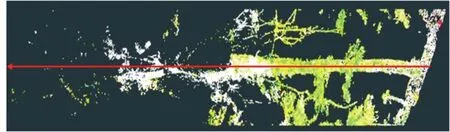
图9 树高提取示意
速的检索定位服务;支持多源样木数据的安全快速实时多用户访问与共享;从可视化角度看,系统支持浏览Url全景数据并关联相对应的样木点云数据,可旋转漫游,通过全景浏览样地的点云数据。系统总体框架的层次化设计思想实现了不同层次的相互独立性,保障了系统的高度稳定性、实用性和扩展性。整体框架结构如图10所示。
(1)用户层:与系统连接的外部实体,为用户提供相应的交互界面,向应用层提交操作指令,并将操作结果返回在客户端显示。
(2)应用层:接受用户层传入的参数完成相应的操作,同时向数据库发出指令,接受数据引擎层反馈的结果。
(3)数据引擎层:主要包括可视化引擎、重构建模引擎、空间数据引擎。数据引擎层为应用层和数据层提供数据引擎通道,向下向数据层传递应用层发出的操作指令,向上反馈相应的数据引擎结果,实现相应的功能。
(4)数据层:该层是整个系统的核心,各类数据按照合理规范的数据标准进行统一入库处理,组成基础地理信息数据库,并建立科学的数据库管理机制。
3.2 系统实现
在该样地样木测绘数据管理系统中,系统分为三个模块:数据管理模块、数据查询模块、三维浏览模块。系统通过PostgreSQL开源数据库提供API来实现与基础底MaP3D_SDE及MaP3D_VE模块的交互。样木测绘数据的浏览工具插件也通过数据库提供的API函数来编写,结合空间数据库的存储调度、三维交互可视化等核心功能,实现多源样木数据的入库、输出、创建索引、实时在线展示等功能[5]。
用户界面与数据库的连接则通过开源的功能类和函数库来实现,例如OGR、Proj4等,包括空间操作、数据库存取和空间数据可视化等,逻辑上以工程的形式组织多源样木数据,实现数据的显示、无缝漫游等可视化操作,以及属性和距离测量等功能。客户端在Visual Studio2010提供的集成开发环境上利用C#语言和Developer Express v2010 vol2编写而成,以充分体现面向对象的特色,易于使用。系统功能如图11所示。

图10 系统架构图
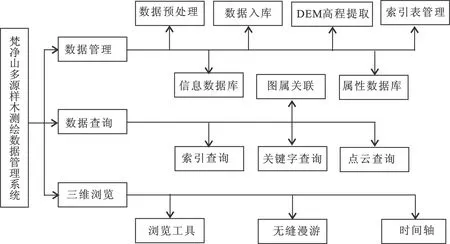
图11 系统功能图
(1)数据管理模块:是本系统中最基础也是最重要的模块,主要提供数据的预处理、入库、高程提取、索引建立等功能;对数据进行分割,并建立多维度索引机制,方便数据的管理,最终形成样木的属性信息数据库。
(2)数据查询模块:主要通过关键字、图形以及属性之间建立的索引实现检索定位服务,解决样木信息管理混乱问题,在查看一棵树对应的点云数据的同时能够查看样地区域内所有样木某高度区间的点云数据,通过点云数据与全景漫游之间的联动更加直观方便的管理样木信息。
(3)三维浏览模块:主要通过系统中的点选、框选、删除要素、坐标网格等浏览工具对样木数据进行样木点云全景展示,并以样木长势提取日期为单位,建立时间轴,可以查询任意采集时间样木的长势情况。
目前,系统经测试已在梵净山样地样木管理中试用,并在规范性、实用性、安全性等方面表现良好,图12、13分别是系统的运行界面,成功实现了样木数据的安全管理和三维展示。
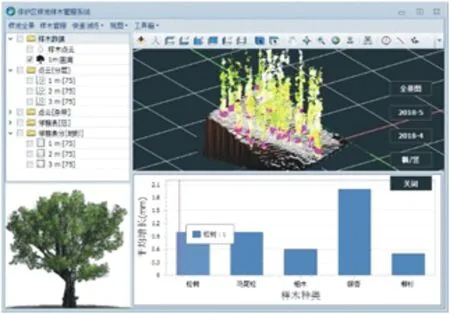
图12 样木点云全景联动示意图

图13 样木长势分析图
4 结论
本研究以现近测绘技术获取梵净山样地多源样木测绘数据并利用Hough变换算法成功对样木参数进行了提取,还开发了多源样木数据管控系统,把保护区样木数据通过三维可视化手段进行管理,较好地解决了多源异构测绘数据的存储及展示,在提高样木数据利用率的同时,达到了更好的人机交互效果。
