基于飞思卡尔芯片的智能车设计
2019-03-05陈定光吴德林
陈定光 吴德林

摘要:本文所设计的智能车,主要选择32位飞思卡尔芯片为控制平台,运用陀螺仪和三轴加速度传感器检测小车直立的状态,在此信息上进一步处理以控制电机的转向和速度,通过实时比较控制算法实现闭环反馈控制。测试表明,该智能车能够很好地进行站立、加减速和过障碍,可以实现对应于不同形状的道路予以相应的控制策略,能够快速稳定地完成整个跑道的行程。
关键词:32位飞思卡尔芯片;自动寻迹;自动避障;闭环反馈控制
引言
智能车的研究始于20世纪50年代初美国 Barrett Electric 公司开发出的世界上第一台自动引导车辆系统(Automated Guided Vehicle System,AGVS)。1974年,瑞典的Volvo Kalmar轿车装配工厂与Schiinder-Digitron公司合作,研制出一种可装载轿车车体的AGVS,并由多台该种AGVS组成了汽车装配线,从而取消了传统应用的拖车及叉车等运输工具。20世纪80年代,伴随着与机器人技术密集相关的计算机、电子通信技术的飞速发展,国外掀起了智能机器人研究热潮,其中各种具有广泛应用前景和军用价值的移动式机器人受到西方各国的普遍关注【1】。智能车的性能主要由机械结构、硬件和软件三部分决定。机械结构是智能车能够行驶的根本,智能车车有了一定的机械结构,再加上相应的硬件和软件,就构成了一个完整的系统。
1.硬件设计
(1)核心板的设计
32位Kinetis系列列单片机MK60是硬件系统的核心部分【2】,用于智能车的整体控制,包括信息的采集处理和输出,其最小系统板如图1所示。
(2)电源模块的设计
系统的正常工作要有稳定可靠的电源保障。系统中需要的电压值主要有:7V,5V,3.3三种。7V电压主要为电池接入口处,一路为直接为电机驱动供电,另一路经过两片LM2940芯片分別产生两个5V电压值。5V电压有两路,其中一路为光电码盘供电,另一路为稳压器1117供电,为主控、CCD、三轴加速度陀螺仪提供3.3V电压。这种两路5V供电的设计,可以减小直流电机开启瞬间电压变化影响,避免了单片机因电压值减小引起的复位及CCD接受电压变化。
(3)电机驱动电路的设计
电机驱动模块采用BTS7970和H桥配合:74HC244驱动MOS管,MOS管驱动电机,这样不但满足电机驱动需求,而且驱动散热好,避免了温漂带来的影响。电机驱动通过IN1和IN2引脚输入PWM波形,以此调节驱动OUT1,OUT2引脚输出电压,调节电机转动速度,以及正反转和拐弯,达到不同的控制效果
(4)编码器
光电编码器,作用是反馈当前速度,使整个系统形成一个闭环系统。我们应用的是龙邱的光电编码器,由于两路电机分别控制,所以要用两个光电编码器。该编码器电源电压为3.3V-5V。
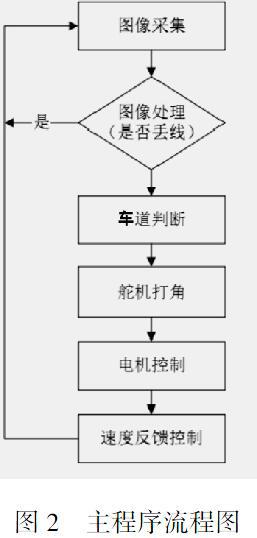
2、软件设计
软件系统部分主要包括:系统初始化、图像采集、图像处理、车道判断、舵机打角、电机控制以及速度反馈处理等。系统流程图如图2所示。
3、结论
本智能车系统设计以32位微控制器MK60为核心,通过一个CMOS摄像头检测模型车的运动位置和运动方向,用欧姆龙编码器检测模型车的速度并使用PID控制算法调节驱动电机的转速和舵机的方向,完成对模型车运动速度和运动方向的闭环控制。为了提高智能车的行驶速度和可靠性,采用了自制的电路板,在性能和重量上有了更大的优势,对比了各种方案的优缺点。实验结果表明,系统设计方案可行,结论正确。
参考文献
[1]卓晴、黄开胜、邵贝贝等编.学做智能车—挑战“飞思卡尔”杯.北京:北京航空航天大学出版社,2007。
[2]雷霏霖,粱志毅,基于CMOS传感器OV7620采集系统设计,西安:西北工业大学,2008。
[3]孙同景,Freescale 9S12 十六位单片机原理及嵌入式开发技术。机械工业出版社,2008。
[4]王名发,江智军,郭鹏,基于OV7620摄像头智能车道路信息视频采集及处理研究,南昌:南昌大学。
作者简介:陈定光,男,2017年大学生创新创业项目主要负责人。
吴德林,男,讲师,2017年大学生创新创业项目指导老师。
(作者单位:广东技术师范学院天河学院)
