Sliding mode control design for oblique wing aircraft in wing skewing process
2019-02-27TingYUEZijinXULixinWANGTongWANG
Ting YUE,Zijin XU,Lixin WANG,*,Tong WANG
aSchool of Aeronautic Science and Engineering,Beihang University,Beijing 100083,China
bChina Ship Development and Design Center,Wuhan 430064,China
Abstract When the wing of Oblique Wing Aircraft(OWA)is skewed,the center of gravity,inertia and aerodynamic characteristics of the aircraft all significantly change,causing an undesirable flight dynamic response,affecting the flying qualities,and even endangering the flight safety.In this study,the dynamic response of an OWA in the wing skewing process is simulated,showing that the three axis movements of the OWA are highly coupled and present nonlinear characteristics during the wing skewing.As the roll control efficiency of the aileron decreases due to the shortened control arm in an oblique configuration,the all-moving horizontal tail is used for additional roll and the control allocation is performed based on minimum control energy.Given the properties of pitchroll-yaw coupling and control input and state coupling,and the difficulty of establishing an accurate aerodynamic model in the wing skewing process due to unsteady aerodynamic force,a multi-loop sliding mode controller is formulated by the time-scale separation method.The closed-loop simulation results show that the asymmetric aerodynamics can be balanced and that the velocity and altitude of the aircraft maintain stable,which means that a smooth transition is obtained during the OWA's wing skewing.
KEYWORDS Decoupling;Dynamic response;Oblique wing aircraft;Sliding mode control;Wing skewing process
1.Introduction
Oblique Wing Aircraft(OWA)can rotate the wing at different flight velocities to form various wing sweep configurations.Representing a simplified minimum drag solution in supersonic flow,the oblique elliptic wing can achieve efficient flight under subsonic cruise/loiter conditions while providing excellent supersonic dash/cruise capability.1,2Therefore,OWA can adapt to multi-mission flight with extended flight envelope,and demonstrate higher combat effectiveness than conventional fixed-wing aircraft.
A significant amount of early theoretical work was conducted by Jones starting from the 1950s.3In the past decades,a number of aircrafts were flown to prove the feasibility of flight control of OWA,including small gliders,small remotely piloted aircraft and the manned AD-1 aircraft flown by NASA.4-8Numerous conceptual design studies and research papers have addressed oblique wing-body-tail or oblique flying wing designs,and a number of wind tunnel tests and flight tests have been performed on both oblique wing and oblique flying wing designs.9-17Recently,there has been renewed interest in developing OWA due to its aerodynamic and structural advantages.
However,a variety of technical difficulties associated with the oblique wing configuration have prevented its application to operational aircraft.A critical technical challenge of OWA arises from its nonlinear and strongly coupled aerodynamic characteristics,and the inertial couplings further complicate the flight dynamics of such aircraft. These complicated characteristics are shown during the wing skewing of OWA,when a relative movement occurs between the wing and the fuselage.The aircraft in various configurations can be described as a time-varying dynamic system.Wing skewing largely changes the aircraft's configuration parameters,including the moment of inertia,the location of the center of gravity,etc.It not only causes changes of lift,drag and pitching moment,but also generates side force,and rolling and yawing moments.This results in the aircraft's highly coupled threeaxis movement and presents strong nonlinearity.In addition,wing skewing causes longitudinal and lateral couplings of aileron control,and lateral control inefficiency of the aileron at a large angle of the oblique wing.As a result,OWA will have an undesirable dynamic response in the presence of wing skews,and the flying qualities and flight safety will deteriorate.It is thus necessary to investigate the flight dynamic characteristics of OWA during wing skewing and design the flight control law to ensure a smooth transition between different configurations.
The wing skewing process of OWA is similar to that of variable-sweep wing aircraft and morphing aircraft.Several studies have been carried out on the flight dynamic modelling and control of variable-sweep wing aircraft and morphing aircraft in configuration variations.18-23However,unlike the aircraft designed in a symmetric configuration,OWA is characterized by the asymmetry configuration with strong three-axis aerodynamic and inertial couplings,resulting in a significant variation in three-axis motion parameters during wing skewing.Currently,there have been a number of studies mainly focusing on the analysis of flight dynamic characteristics24-26and flight control design of OWA in static configurations(wing- fixed configurations at different oblique angles).27-32However,the existing literature does not consider the influence of the wing skewing process on aircraft's dynamic characteristics;additionally,there is lack of published literature about dynamic characteristics of and flight control design for the process of wing skewing.
Due to the inertial and pitch-yaw-roll aerodynamic couplings in the wing skewing process,OWA is a non-linear time-varying system.This causes a difficulty in modeling precisely the aerodynamics of wing skewing which has uncertain dynamic behaviors.In addition,due to the inertial and aerodynamic cross-couplings,it is difficult for conventional control methods such as proportional-Integral-Derivative(PID)control to obtain acceptable control performance.A feasible approach for flight control design is sliding mode control theory,which can guarantee the dynamic qualities of the sliding mode motion and approaching motions by designing the sliding mode function and approaching rate,respectively.33,34
In this study,OWA is regarded as a rigid body system composed of the fuselage and rotating wing,and a time-varying and nonlinear dynamic model is built in order to examine the flight dynamic characteristics of OWA in the wing skewing process.The dynamic responses are numerically simulated and analyzed.According to the highly pitch-roll-yaw coupling,control input and state coupling,and nonlinear properties of OWA,a multi-loop sliding mode controller is designed based on the time-scale separation method.The all-moving horizontal tail is used for roll control due to the insufficient control effect of the aileron,and the control allocation of the control surfaces is performed based on minimum control energy.The simulation results show that the controller can ensure the good dynamic characteristics of OWA during wing skewing.The work introduced in this paper can provide a theoretical reference for flight control design for OWA.
2.Dynamic modeling and analysis
2.1.Layout and aerodynamic characteristics of OWA
The OWA investigated in this study is presented in Fig.1.The oblique wing is designed to rotate from 0°to 60°with the right wing forward.
When the wing is skewed,the configuration parameters of the OWA change significantly,which mainly include the center of gravity position and the moment of inertia.Since the rotation axis of the wing is in front of the wing gravity center and parallel to thez-axis in the body axes,the aircraft's gravity center shifts forward to the right when the wing is skewed,while the gravity center position along thez-axis remains unchanged.Meanwhile,the inertia moment and product of inertia also change significantly.As the symmetry of the conventional layout is destroyed,the cross inertial productsIxyandIyzappear.The inertia coupling is strong between the longitudinal and lateral axes,which obviously affects the flight dynamic characteristics of the OWA.32
The asymmetric layout formed by the skewed wing also has a great influence on aerodynamic characteristics,which are stated as follows.32The drag gradually decreases with the increase of the skew angle Λ.Since the effective wing span reduces after the wing is oblique,the lift decreases.In addition,the asymmetric wing layout generates side force,which is rather large and cannot be ignored.The oblique wing generates not only additional nose-down pitching moment,but also rolling moment and yawing moment.The rolling moment sinks the front wing and the yawing moment makes the aircraft rotate to the right.
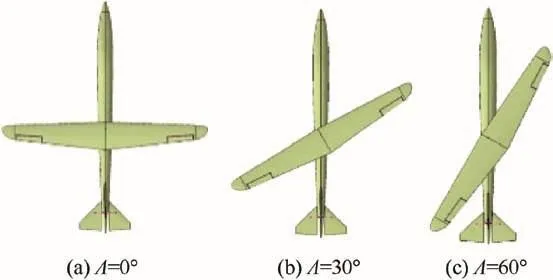
Fig.1 Layout of the oblique wing aircraft.
After the wing is oblique,the ailerons are arranged back and forth.When the ailerons are deflected,the difference in lift will generate additional pitching moment.32This should be considered in designing flight control law for the wing skewing process.In addition,the control arm of the aileron is shortened after the wing is oblique,which gradually decreases the roll control efficiency of the aileron with the increase of the wing skew angle.This may result in insufficient roll control ability of the ailerons.Therefore,it is necessary to use the all moving horizontal tail for additional roll control of the OWA in the large skew angled configuration.27
2.2.Dynamic modeling
During the oblique wing skewing,the OWA's gravity center keeps changing.In this paper,the origin of the body axes is located at the center of gravity of the OWA at 0°skew angle.According to the momentum theorem and the theorem of moment of momentum for any moving point,18,35we get the nonlinear dynamic equations of the OWA in the wing skewing process in a scalar form as below:

where[X,Y,Z]is the total force on the aircraft,[L,M,N]the total moment relative to the origin of the body axes,mthe mass of the aircraft,[u,v,w]the flight velocity,[p,q,r]the angular velocity in the body axes relative to the inertial axes,[Sx,Sy,Sz]the static moment of aircraft,[S1x,S1y,S1z]the static moments of the wing,mthe mass of the wing,Ithe rotational inertia,and[ω1x, ω1y, ω1z]the projections of the angular velocity of the wing in the body axes.It can be seen from Eqs.(1)and(2)that,unlike the dynamic equations of conventional fixed-wing aircraft,there are additional terms caused by the center of gravity position shift and wing skew rate.
In the variable-sweep process of swept-wing aircraft and the wing-folding process of morphing aircraft,when the changing rate of configurations is slow,the influence of unsteady aerodynamic characteristics of the aircraft is small.18,21,22Analogously,when the angular velocity of the OWA's wing skew is comparatively small,the quasi-steady assumption can be used to simplify the calculation of aerodynamic force during the wing skewing process.It is considered that the aerodynamic force of the whole aircraft depends on the static configuration and the flight status of the aircraft at that time.In this study,we just investigate the case in which the angular velocity of the OWA's wing skew is comparatively slow,and in which the aerodynamic force is simplified using the quasi-steady assumption.The aerodynamic uncertainty caused by simplification is solved by robust sliding mode control design.Therefore,here we simplify that the aerodynamic model during the wing skewing is the same with the static configuration.32
When the OWA is in an asymmetric configuration,the pitching motion will generate roll and yaw motions which will then generate pitching motion.Moreover,the deflection of the aileron will generate pitching moment.The aerodynamic crosscouplings are dependent on the wing skew angle and the angle of attack.As a result,the nonlinear equation of motion can be expressed as

where f is a nonlinear time-varying function about x and u.The changes of the state variables affect the efficiency of the control input,and the control input can lead to changes of the state variables,i.e.,coupling exists between x and u and cannot be overlooked.This is the main difference of the six degrees of freedom nonlinear model with that of conventional aircraft.
2.3.Analysis of dynamic characteristics
The flight dynamics of the OWA in the wing skewing process without control is mathematically simulated.The aircraft's CG position of the straight wing configuration is selected as the origin of the body axes.The wing skewing process and returning to straight wing process are simulated separately.The initial condition is a straight and level flight atH=4000 m andMa=0.4.The dynamic responses are presented in Figs.2 and 3,where γ,φ,andVare climb angle,roll angle and velocity respectively.
It can be seen from Fig.2 that the initial responses of the aircraft are mainly the changes of the three-axis angular velocities and attitudes when the wing is skewed.This is mainly caused by the asymmetric aerodynamic layout,resulting in a nose down pitching moment and positive rolling and yawing moments.The rolling moment sinks the front wing and the yawing moment makes the aircraft rotate to the right.As the skew angle continues to increase to 30°,the asymmetric rolling moment still exists.Then the roll angle increases rapidly and the lift direction keeps tilting.Meanwhile,the lift coefficient decreases with the increase of the skewing angle,so that the lift cannot balance the gravity of the aircraft.Therefore,the aircraft dives with acceleration and cannot reach a new steady state.

Fig.2 Dynamic responses in the wing skewing process.
During the changes of configurations,the attitude,altitude and speed of the OWA are all obviously changed.Therefore,a flight control law should be designed to ensure the flight safety and flying qualities of the aircraft in the dynamic process.
3.Flight control law design based on sliding mode control method
In the wing skewing process,the three-axis movements of the OWA are highly coupled and strongly nonlinear,and it is thus difficult to establish an accurate aerodynamic model.This leads to a certain error between the simulation results and the real flight response,meaning that there exists uncertainty in the motion model of the aircraft.In addition,the range of the motion parameters is large,which requires the flight control system to be more robust.Since the sliding mode control method can ensure the dynamic quality through the design of the sliding mode function and the approach rate,the designed controller can adapt to the parameter changes of the OWA during the wing skewing.The sliding mode controller has strong robustness and can obtain precise control effect,more suitable for the OWA with a large range of parameter variations,and with time-varying and nonlinear characteristics.Therefore,the flight control law using sliding mode control method is designed in this study.The control objective is to keep the altitude and velocity of the OWA constant during the wing skewing,so that a smooth transition of the configuration changes can be achieved.
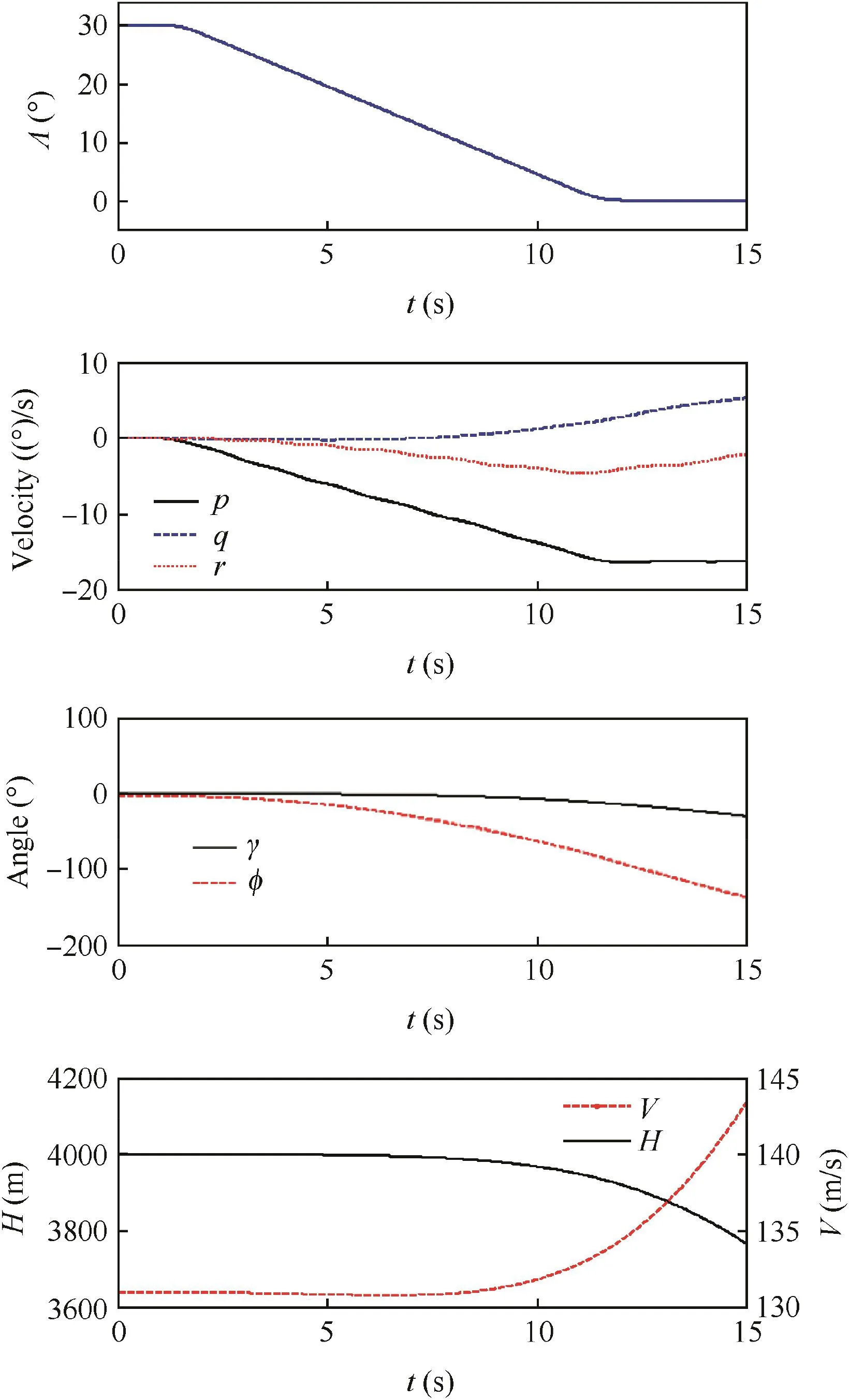
Fig.3 Dynamic responses during the returning to the straight wing.
3.1.Flight control system design based on sliding mode control
If a nonlinear system˙x=f( x,u,t)can be transformed to an affine system˙x=f( x,t)+g( x,t)u,the sliding mode control can be applied conveniently.However,the OWA's dynamic equations of motion during the wing skewing exhibit inertia and aerodynamic cross couplings,and cannot be directly transformed to the affine form.According to the characteristics of the aircraft motions,we propose that the OWA's variables of movement are divided into fast and slow variables by using the time-scale separation method.Then the complicated nonlinear equations can be simplified to an inner-loop and an outer-loop affine systems,and the sliding mode control design can be easily applied to the design of the inner-loop and outer loop sliding mode controllers.
The sliding mode flight control system introduced in this paper mainly includes five modules:the modules of control command generation,outer-loop control law,inner-loop control law,control surface allocation,and automatic throttle.The inner and the outer loops are separated by time-scale separation method for the aircraft motions.The control structure is shown in Fig.4.
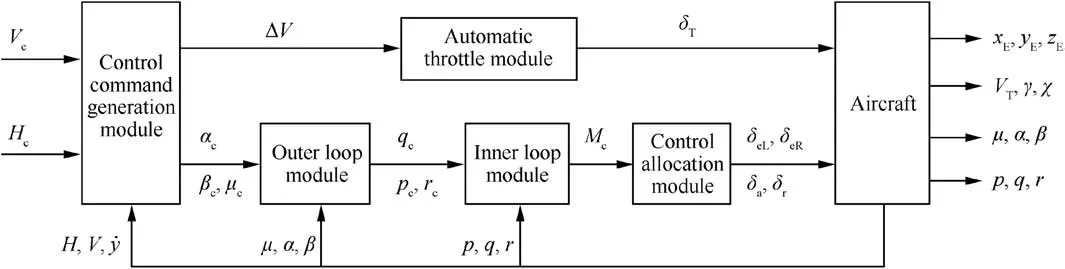
Fig.4 Flight control structure.
The function of each module is introduced as follows:
(1)The control command generation module generates control commands to the outer-loop control law module and the automatic throttle module based on the states of the aircraft.In order to ensure that the aircraft's altitude and speed remain constant without sideslip,the roll angle is used to generate force to balance the side force generated by the asymmetric configuration.The output control commands are formulated as

where ΔV, αc, βcand μcare the output command of speed,angle of attack,side slip angle and roll angle in the speed axis,respectively.HcandVcare the target altitude and speed,respectively.KΔH,K˙HandK˙yare the gains corresponding to the altitude error ΔH,the altitude varying rateand the yaw rate,tuned to be 2 rad/m,-0.5 rad s/m and-6 rad s/m according to the control performance,respectively.
本文中我们采用哈希算法,主要的过程为:发送方采用单向哈希函数对消息进行计算,得到摘要并发送消息和摘要。接收方将接收到的消息,按同样方式进行哈希函数计算,并将新得出的结果与发送方的原摘要结果进行比对。如结果一致,说明消息完整。在本系统中,摘要信息的不可变,保证了需要存证信息的完整性和真实性。将需要存证的电子数据放在区块链中,避免数据被恶意篡改。
(2)The outer-loop control model generates the input command [pc,qc,rc]Tfor the inner-loop model based on the control reference[αc,βc,μc]T.According to the time-scale separation method for the state variables,the dynamic responses of the fast variables of the inner-loop are considered to have reached steady states and are neglected in the outer-loop design.Thus,the inner and outer-loop control laws can be designed separately.The differential equation can be expressed as

where xs=is the 3 × 3 matrix in Eq.(5),us(t)=[p,q,r]T,ys(t)is the output.
For a system such as Eq.(6),according to the sliding mode control theory,36the sliding mode surface can be designed as

where the values of the sliding surface control parameterscis(i=1,2,3)should makeHurwitz stable.The system can reach the sliding mode surface within a limited time and the error tends to be zero when the control law takes the following form37,38:
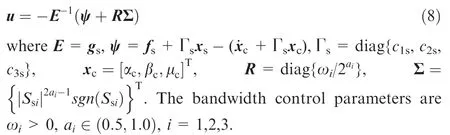
In order to suppress the vibration of the system,the signfunction sgn of the control law is replaced by the following saturation function

where ε is a small positive number.According to the control effect,the parameters are tuned as below:Rs=diag{2,2,2},Γs=diag{0.1,0.1,0.1},and ε=0.1.
(3)The inner loop calculates the required three-axis control moments to track the command [pc,qc,rc]T.The rotational dynamics Eq.(2)can be rewritten as

Similar to the nonlinear MIMO system of the outer loop,Mccan also be obtained by using the control law of Eq.(8).Here and∑f=also replaced by a saturation function wherea1=a2=a3=2/3,and ε=0.05.
(4)The control allocation module calculates the required deflections of the control surfaces based on the demand of three-axis control moment Mc.Since the roll control efficiency of the OWA's aileron is low in the large skew angled configuration,the all-moving horizontal tails are used to assist roll control.27The control surface allocation can be expressed as

where G is the matrix of the control coefficient,and u= [δa,δr,δeL,δeR],δa,δr,δeL,δeRare deflections of the aileron,rudder,left elevator and right elevator,gij(i=p,q,randj= δa,δr,δeL,δeR) are the three-axis moment control efficiencies.
In order to avoid the full or extremely small deflection of a certain control surface,we use Δ =]to weigh the allocation.Then Eq.(11)can be rewritten as

where GΔ=GΔ,and^u=[δa/δamax,δr/δrmax,δeL/δeLmax,δeR/δeRmax]T.The control inputucan be obtained by a pseudoinverse of Eq.(12),an expenditure of minimum control energy,39and can be expressed as

(5)Since the drag and flight velocity of the OWA both change significantly in the wing skewing process,the throttle is used to control the speed of the aircraft.Designed by the traditional PID control method,40the automatic throttle control law is expressed as

Fig.5 Closed-loop system responses(H=4 km and Ma=0.4).

wherek1,k2,andk3are the gains of PID,and the parameters are tuned ask1=-6 s/m,k2=-5 m-1andk3=-1.5 s2/m.
3.2.Closed-loop simulation and analysis
The sliding mode control law is verified by closed-loop simulations for the wing skewing process and the process of wing returning to the straight position.The initial flight conditions areH=4 km andMa=0.4.The dynamic responses of the parameters are shown in Fig.5.
The closed-loop simulation results for the wing skewing process are shown in Fig.5(a).It can be seen that since the lift coefficient of the aircraft gradually decreases with the increase of the skewing angle,the angle of attack gradually increases to achieve the balance of the longitudinal force.The sideslip angle is maintained as 0°,which is consistent with the target command.The aircraft rolls to the left and the component of gravity is used to balance the asymmetric side force;the aircraft eventually maintains a certain roll angle.In the entire process,the speed and altitude of the aircraft basically remain unchanged.We can see that the three-axis control surfaces deflect collaboratively to balance the asymmetric aerodynamic moments and that the throttle is decreased to balance the reduced drag.The all-moving horizontal tail participates in roll control and involves in the control allocation based on minimal control energy,and the deflections of the control surfaces and the throttle are smooth.
The closed-loop simulation results for the process of wing returning to the straight position are shown in Fig.5(b).It can be seen that the attitude of the aircraft changes exactly in the opposite direction of the wing skewing process.The lift coefficient increases,the lateral force decreases to zero,and the angle of attack decreases.Moreover,the roll angle for balancing the side force returns to zero,while the sideslip angle remains zero.After returning to the symmetrical configuration of the straight wing,the asymmetric moment disappears and the drag increases.As a result,the lateral control surfaces(rudder,ailerons,and differential horizontal tail)decrease to zero and the throttle increases accordingly.During the whole process,the flight velocity and altitude of the aircraft basically remain unchanged.It can be seen that the sliding mode flight control law can fully guarantee the OWA flight at the required altitude and speed during the processes of wing skewing and returning to the straight position.
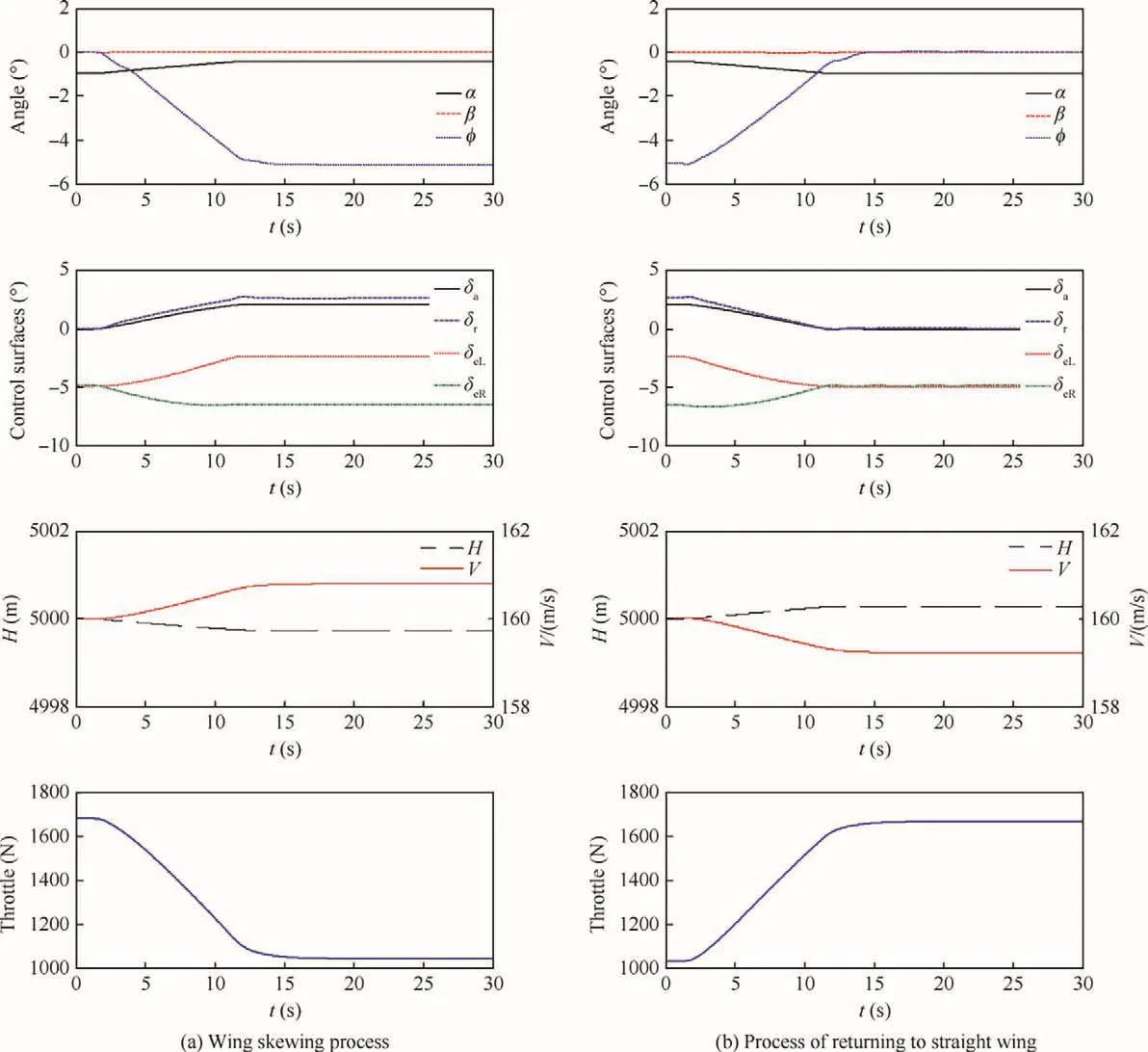
Fig.6 Closed-loop system responses(H=5 km and Ma=0.5).
To validate its robustness in the presence of the oblique wing,the sliding mode flight controller is applied to control the OWA in another flight state.Fig.6 presents the closedloop dynamic responses of the OWA during both the wing skewing and the returning to the straight wing atH=5 km andMa=0.5;the responses are controlled by the sliding mode flight controller designed for the state ofH=4 km andMa=0.4.We can see that the flight controller can still ensure that the altitude and speed in the wing skewing process are almost unchanged.This means that the sliding mode controller designed in this study has good robustness.
4.Conclusions
(1)The three-axis motions of the OWA are significantly coupled and highly nonlinear in the wing skewing process.The initial dynamic responses of the aircraft in the processes of wing skewing and wing returning to the straight position are mainly the changes of threeaxis angular velocities and attitudes.With the rapid increase of the roll angle,the lift direction of the aircraft continuously changes,thus being unable to balance the gravity of the aircraft.The aircraft continues to dive with acceleration in the two processes mentioned above,and cannot reach a new balance state.
(2)The moment arm of the aileron is shortened when the wing is skewed,which leads to an insufficient rolling control effectiveness.Therefore,the all-moving horizontal tail is used for assistant roll control.According to the three-axis coupling characteristics of aileron control,the control surfaces are allocated based on minimum control energy,achieving an accurate control effect.
(3)According to the characteristics of pitch-roll-yaw coupling,control input and state coupling,and difficulty to accurately establish the aerodynamic model,a multi-loop sliding mode flight controller is designed by the time-scale separation method for the OWA to ensure the smooth transition during the wing skewing.The simulation results show that the robust sliding mode flight controller can smoothly adjust the attitude of the OWA to balance the asymmetric aerodynamic forces generated in the processes of wing skewing and returning.In addition,the speed and altitude of the aircraft can be kept constant.
Acknowledgement
This work was supported by the National Natural Science Foundation of China(No.11402010).
猜你喜欢
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- A review of chatter vibration research in milling
- Impact of reduced frequency on the time lag in pressure distribution over a supercritical airfoil in a pitch-pause-return motion
- Thermal state calculation of chamber in small thrust liquid rocket engine for steady state pulsed mode
- Adaptive optimization methodology based on Kriging modeling and a trust region method
- Aircraft engine fault detection based on grouped convolutional denoising autoencoders
- Predicting lean blow-off of bluffbody stabilized flames based on Damköhler number