一种球形电动机转子三自由度位置检测方法研究
2019-02-25李雪逸王群京李国丽过希文鞠鲁峰
李雪逸,王群京,钱 喆,李国丽,过希文,鞠鲁峰,周 睿
(安徽大学,合肥 230601)
0 引 言
近年来,随着科技水平的进步,越来越需要实现多自由度运动,如拟人运动中的关节运动和视觉运动。球形电动机概念的提出和研究旨在更好地满足多自由度驱动装置的需求,减少由单个自由度系统和其他装置组成的多自由度运动系统所带来的诸如能耗大、效率低等实际问题。与传统多自由度传动机构相比,球形电动机拥有摩擦力小、结构更加简单、体积更小等优势,有很高的研究价值。
尽管球形电动机类型、原理、控制策略各不相同,但是依然需要更加高效的位置检测环节以辅助电机的控制。然而,普通电机常见的位置检测策略却很难适用于有球形电动机的场合。
目前,国内外同样也已经提出了多种球形电动机的位置检测方法,它们的原理、使用的仪器各不相同。其中具有代表性的方法包括滑轨支架测量系统、利用光电/双光学传感器的转子位置检测方法、机器视觉的方法、利用霍尔效应传感器和神经网络的方法[1-2]等,它们存在显著的优点和缺陷[3]。
本文研究了永磁球形电动机转子的三自由度位置检测策略,通过三维磁感应强度传感器采集的数据来测量球形电动机转子包括空间和自旋的三自由度位置,进行了仿真验证并搭建了实验平台,并进一步对可能影响实验结果的误差进行了全面的分析。
1 永磁球形电动机基本结构及运行原理
本文使用的永磁球形电动机结构的具体参数如下:定子半径(壳内/外)为100 mm/117 mm;转子直径为112 mm;永磁极个数为8;圆柱永磁极直径和高度均为20 mm;线圈个数为24/2层;线圈匝数为1 600;最大倾斜角度为±15°。
定子线圈产生磁场。在球形电动机的控制中,按照通电策略能为转子磁极带来力矩,推动转子自旋和产生角位移。通过位置检测环节将转子的位置实时反馈。
2 基于三维磁场的位置检测方法
单个轴向充磁的圆柱形永磁体周围任意空间位置的磁感应强度矢量具有唯一性,根据某磁感应强度矢量能推算出该位置对应的永磁体附近的位置。将永磁体固定在转轴上,它周围的磁场跟随转轴运动且具有实时性。三维磁感应强度传感器能够采集到磁感应强度的正交分量。利用其采集到的磁感应强度分量解算出转子的三自由度位置[4-6]。检测系统示意图如图1所示。
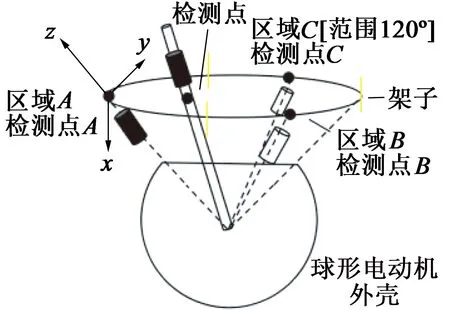
图1 检测系统示意图
文献[7]中采用的是气隙磁场,由于永磁球形电动机气隙磁场空间有限,距离线圈和转子磁极太近,易受影响。单从气隙磁场解构转子位置尤其困难。本文对文献[7]的方法进行改进,不使用电机气隙磁场,而是在球形电动机外部进行数据的采集和位置信息的解构。此外,该文献仅提出了求解球形电动机转子二自由度位置的算法,本文将对第三个自由度,即转子的角位移进行进一步的分析和解构。
2.1 测量的基本原理
图2描述了坐标系中的两个轴向充磁的圆柱永磁体和两个检测点的相对位置。永磁体1和永磁体2的中心点分别为Pm和Pw,N极朝向所在轴的正方向,S极朝向所在轴的负方向。它们与绝对坐标系X,Y,Z的坐标原点直线距离分别为Lm和Lw。检测点1,2的中心点分别为Ps和Ph。
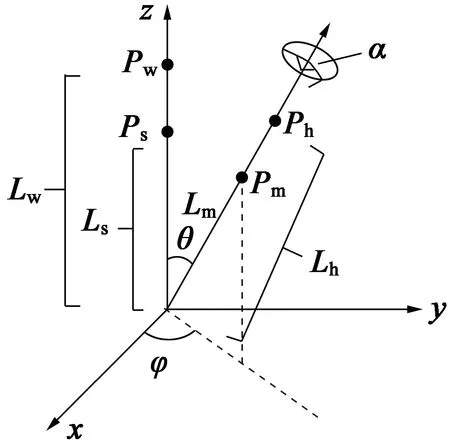
图2 描述永磁体和检测点相对位置的绝对坐标系
P点在绝对坐标系上的坐标P(x,y,z)可以描述如下:
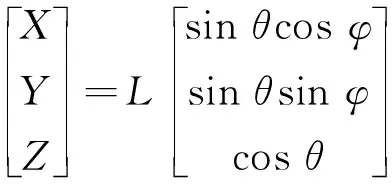
(1)
式中:L为OP距离。显然,通过φ,θ可以得到P点的坐标且该坐标具有唯一性。
本文位置检测的基本思路描述如下:通过φ和θ解算出转子的空间二自由度位置,再由永磁体2与检测点2之间的关系,确定转子的自旋位置。
本文需要在检测点放置三维磁感应强度传感器。将一个传感器和一个永磁体固定,作为一组,置于相对坐标系为xi,yi,zi的Z轴上S处。第一组置于A区域内,i=1;第二组置于B区域内,i=2;第三组置于C区域内,i=3。置于三个区域的传感器分别为SA,SB,SC。由绝对坐标系获得相对坐标系的方法如下:将前者按照逆时针绕Z,X轴旋转β,α角的次序以获得后者。β=0°,β=120°,β=240°对应相对坐标系xi,yi,zi的i=1,2,3。
以A区域为例。在该区域,通过SA检测出的数据解算出转轴上的P点在相对坐标系中的空间位置P(x,y,z),经过坐标转移变换,即得到转子的二自由度位置。P(x,y,z)的计算方法:
式中:L为P点到原点距离,R为坐标变换矩阵。
2.2 转子空间位置解算与仿真分析
检测点1位于绝对参考坐标系Z轴上,其检测出的磁感应强度B的正交分量Bx,By,Bz方向与绝对参考坐标系中的X,Y,Z轴正方向相同。圆柱形永磁体1,永磁体2在检测点1处产生的磁感应强度分别为B1s和B2s,得到:
(3)
在Ps点放置传感器S,其测得的正交磁感应强度分量分别为Bx,By,Bz。由于检测点1和永磁体2相对位置不变,B2s能预先测得,从而推导出B1s。φ由下式求得:
(4)

(5)
式中:θk∈[0,θ0],Bk=f(θk),k=1,2,…,n-1。
在θ和φ确定后,无论转轴如何自旋,永磁体2相对于检测点1的位置均保持不变,可以忽略自旋的影响。
将绝对坐标系按照沿Z,Y轴逆时针旋转φ,θ角的次序形成相对坐标系x1,y1,z1,使永磁体1位于坐标系x1,y1,z1的(0,0,Ls)位置上。传感器S记录的永磁体1的位置信息如下:
得:
(6)
利用磁偶极子法,建立圆柱永磁体等效DMP模型,通过式(7)[8]计算B1x,B1y,B1z:
(7)
同样以A区域为例。永磁体和检测点参数如表1和表2所示。当永磁体在θ∈[0,π/9],φ∈[0,π]范围内时,检测点检测到的磁感应强度分量随φ,θ的变化如图3所示。
表1 磁源永磁体参数
表2 检测点与永磁体位置信息
(a) X方向 (b) Y方向 (c) Z方向
图3随φ,θ变化的X,Y,Z方向磁感应强度
2.3 转子自旋位置解算与仿真分析
检测点2位于转轴上,其检测出的磁感应强度B的分量Bx,By,Bz的方向一直在旋转,假定为坐标系X″,Y″,Z″。设永磁体1,2在检测点2产生的磁感应强度分别为B1h,B2h,得:
(8)
由于检测点2和永磁体1相对位置不变,因此可以通过B1h解算B2h。
将X,Y,Z按照沿Z,Y,X轴逆时针旋转φ,θ,α角度的次序形成X″,Y″,Z″。检测点2在XYZ中坐标为x,y,z,在X″,Y″,″中为x″,y″,y″。得:
推出的x″,y″,z″表达式:
(9)
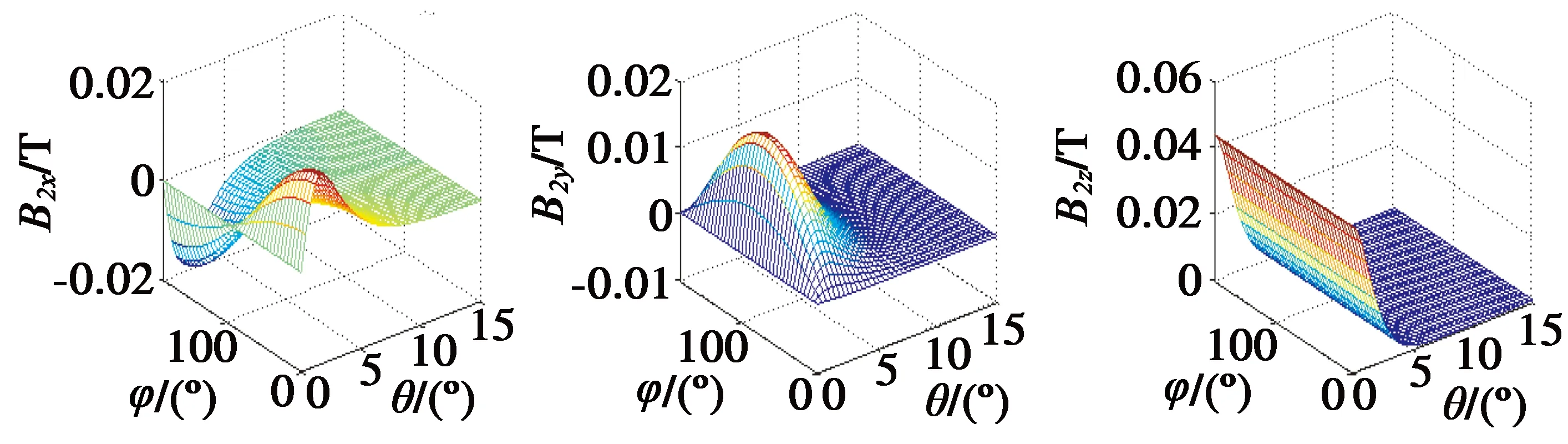
同理,能求得B2各分量。
任取θ,φ的值θ=10°,φ=36°。磁感应强度分量Bx,By,Bz随自旋角变化,如图4所示。
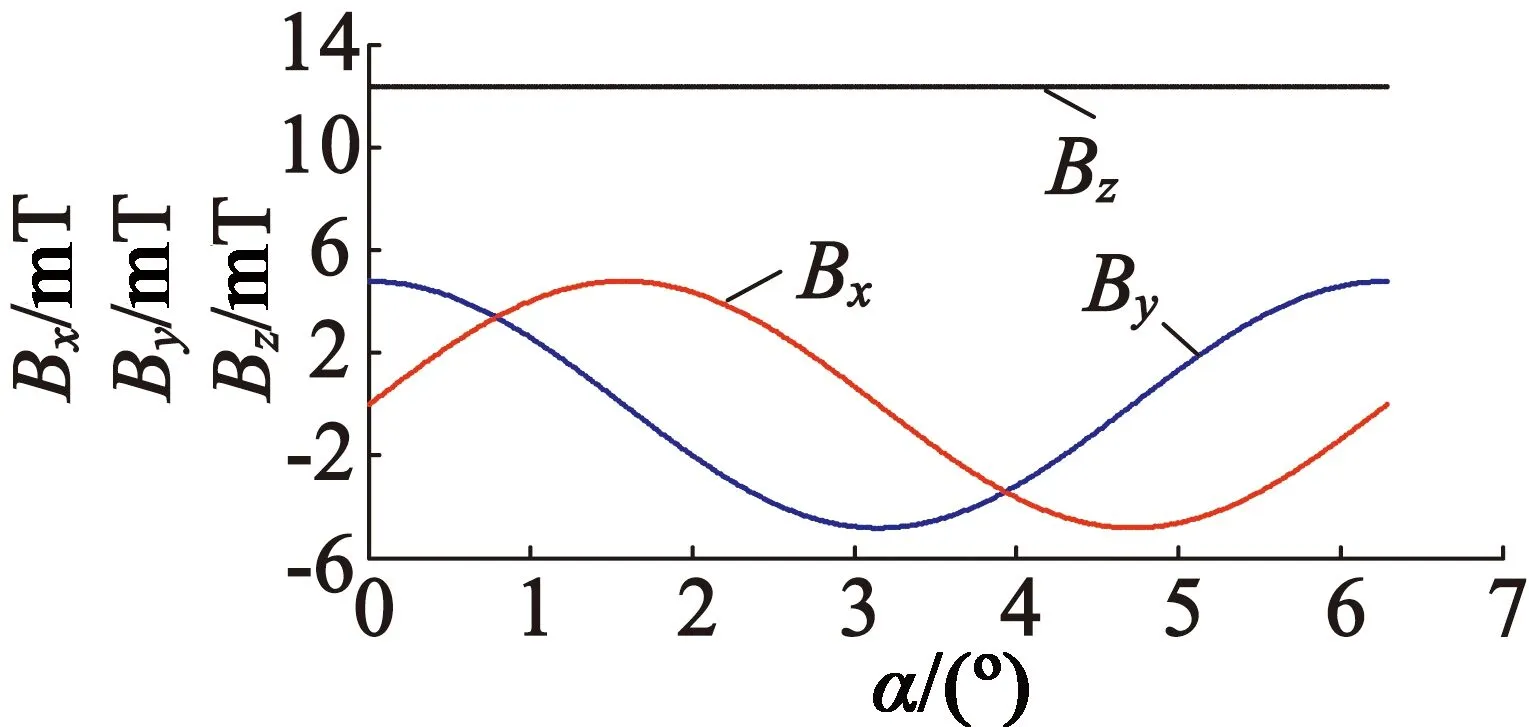
图4 θ=10°,φ=36°下检测点2磁感应强度分量随自旋角变化图
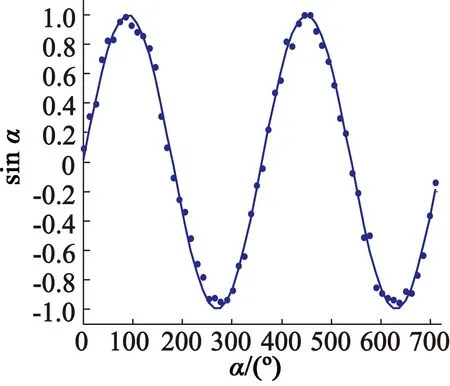
由图4确定θ,φ值后,检测点测出的任意一组Bx,By,Bz能确定唯一的α角,如图5所示。
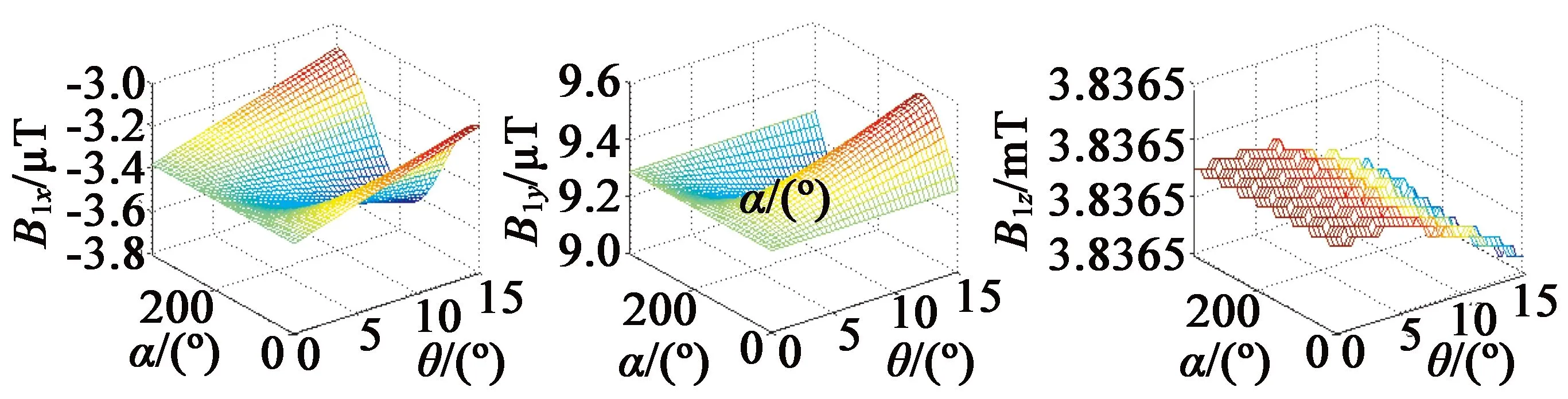
(a)X方向 (b)Y方向 (c)Z方向
图5φ=36°下检测点2磁感应强度分量与α,θ关系图
2.4 转子位置检测实验平台
为了检验本文位置检测算法,依据该算法搭建位置检测系统实验平台如图6所示。下位机使用STM32F103C8T6单片机和MLX90363三维霍尔传感器进行位置信息采集。上位机负责处理相关数据并与软件的仿真结果进行比对。
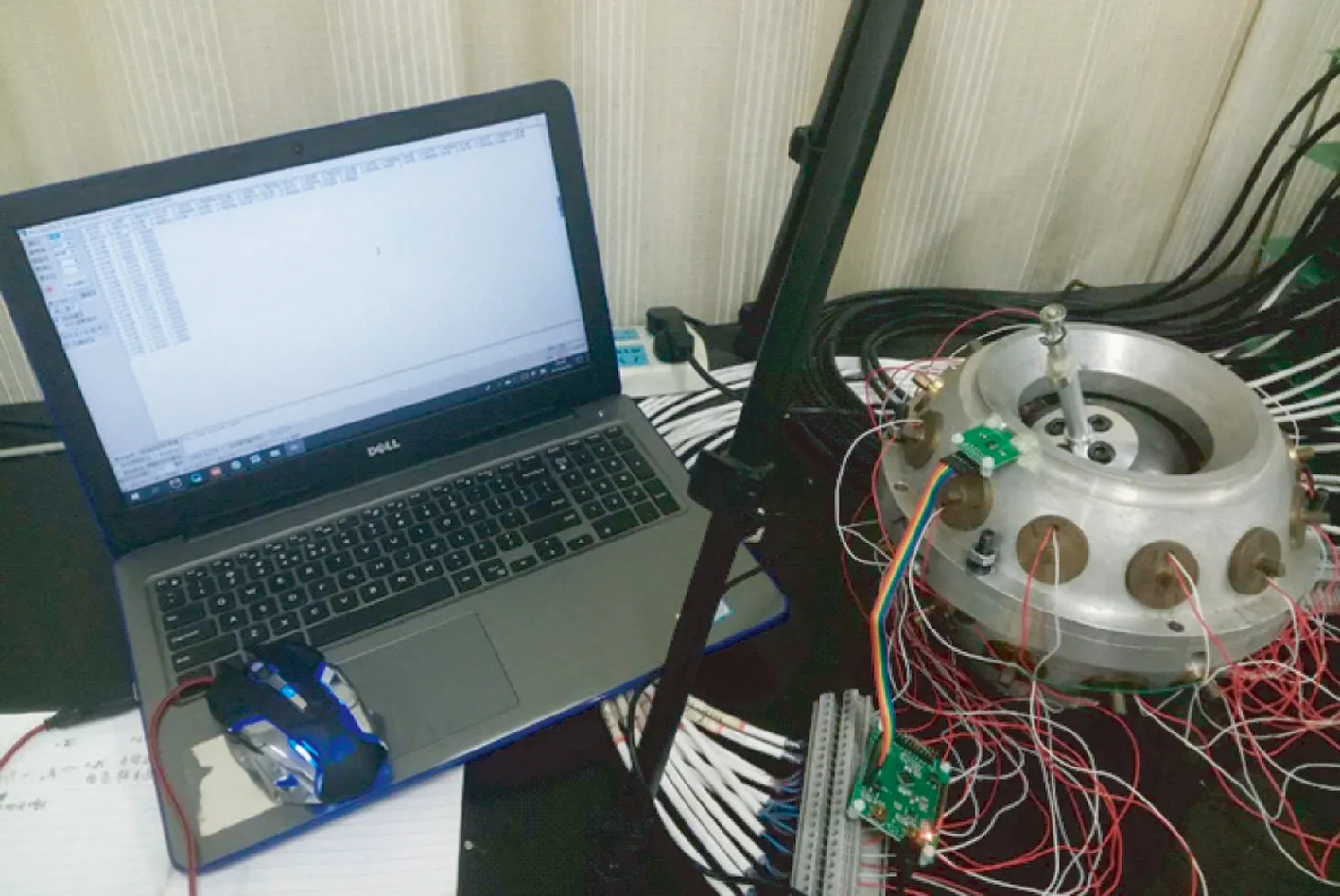
图6 位置检测系统实验平台
图7为STM32F103C8T6单片机、MLX90363传感器和显示在上位机的转子位置信息。MLX90363是三维霍尔传感器,在摇杆领域应用比较广泛。它在利用磁场聚集片聚集空间中的磁场的同时,利用集成的霍尔感应单元分别检测三个正交方向的磁感应强度,并用串口SPI通信总线传输处理后的位置数据。相较于使用多个线性霍尔传感器组合进行测量的方式,使用三维霍尔传感器能够更加便捷地读取数据,并减小组合线性霍尔传感器过程中带来的人为误差,能够在一定程度上提高精度。
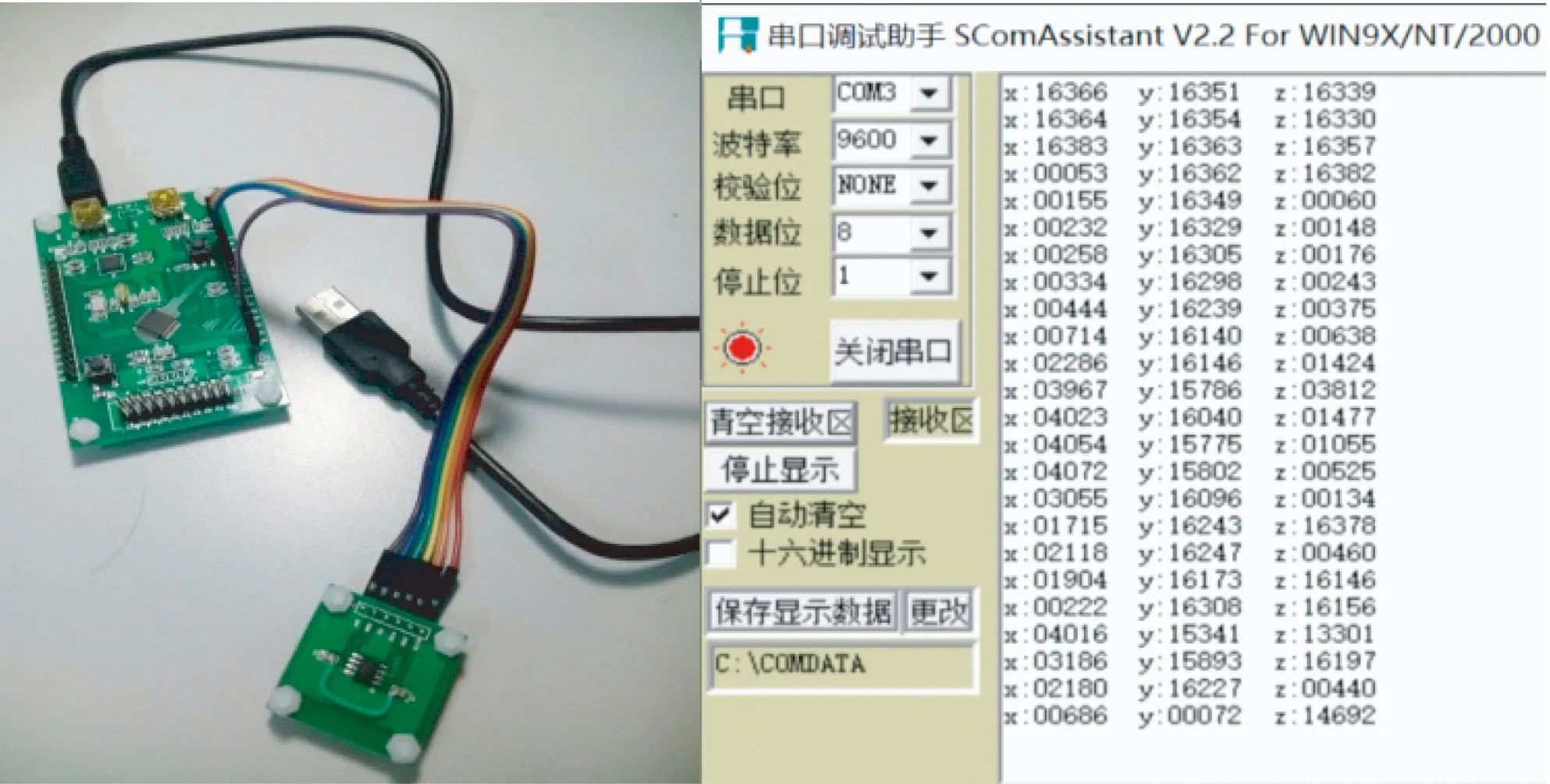
图7 单片机、传感器和采集的数据
将球形电动机转轴依照图8中的θ,φ,α预设的轨迹进行重复运动。分别对θ,φ和α采用60个不同位置的定位操作,定位点如图8所示。实验结果表明,在θ较小处,误差偏小,原因在于此时的磁感应强度较大,衰减程度小,能达到相对高的计算精度。θ,φ和α的误差最大值依次为1°,2°,8°。
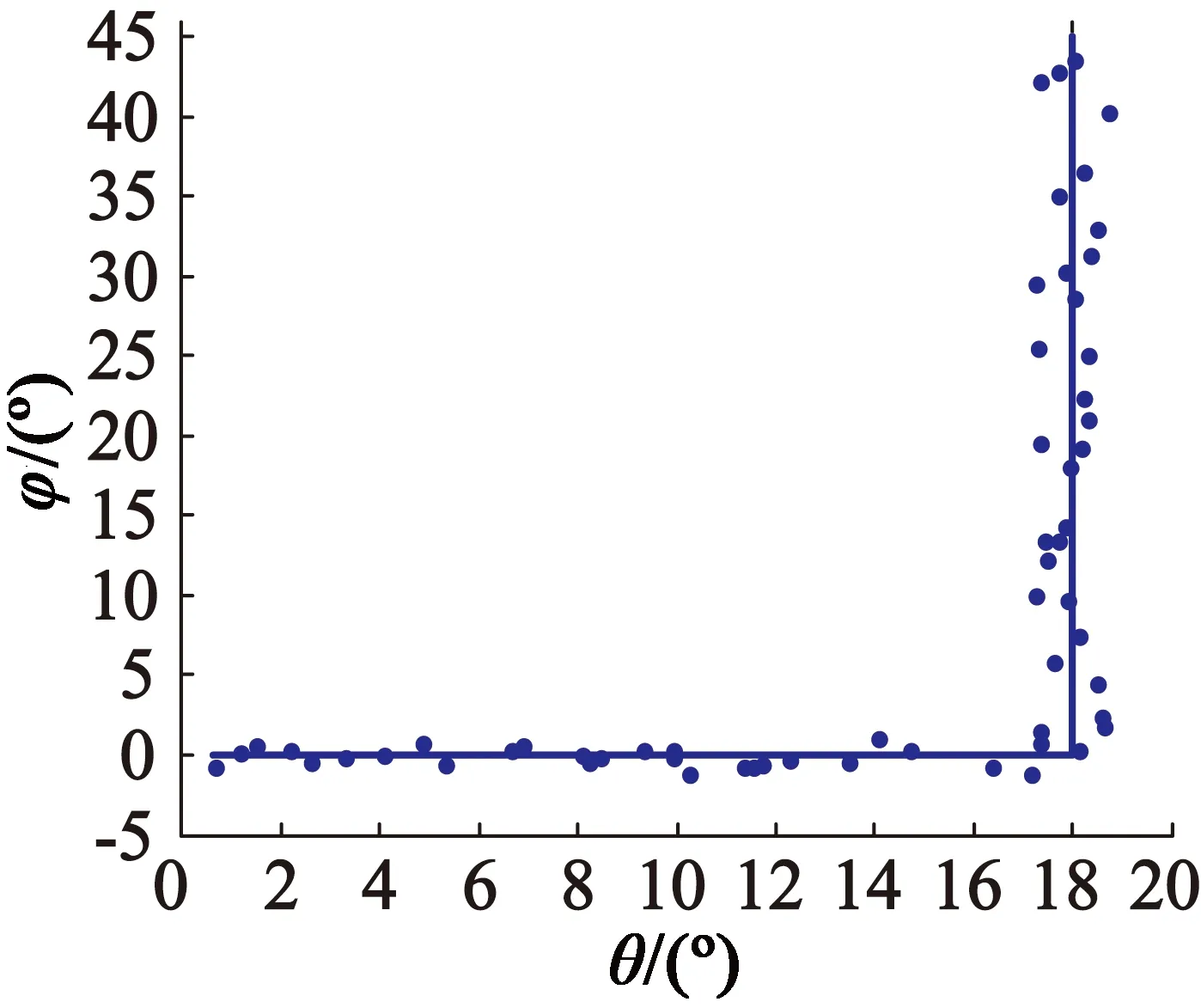
(a) θ,φ定位
(b) α定位
3 误差分析
电机内部产生的磁场会一定程度影响传感器所在位置测量的磁场,本节分析非磁场检测区永磁体对检测区磁场、电磁线圈、转子永磁体以及永磁体安放问题等对测量磁场的影响[9-10]。
3.1 其他区域永磁体对检测区磁场的影响
以A区域为例。SA传感器会感应到B,C区域永磁体的磁感应强度。在Ansoft Maxwell中可以仿真得到A,B,C区域永磁体在传感器处产生的磁感应强度分量:
Bx,y,z=(0.081 3 T,-0.008 91 T,0.105 T)
该值是一个恒定值。在处理得到的位置信息时,考虑此恒定值能够消除此误差。SB,SC同理。
3.2 转子永磁体对检测区域磁场的影响
永磁球形电动机转子上分布有40个永磁体,会引起位置测量误差。使用Ansoft Maxwell搭建本文研究的球形电动机的三维模型[11]。
位于转轴上的传感器与转子永磁体的相对位置是固定值,通过仿真,可以得到40个转子永磁体在该点产生的磁感应强度分量同样是恒定值:
Bx,y,z=(-0.048 8 mT,0.219 mT,0.122 mT)
以A区域为例。在A区域内,当转子从垂直方向开始偏转到最大角度时,转子的40个永磁体在SA处产生的磁感应强度大小如图9所示。
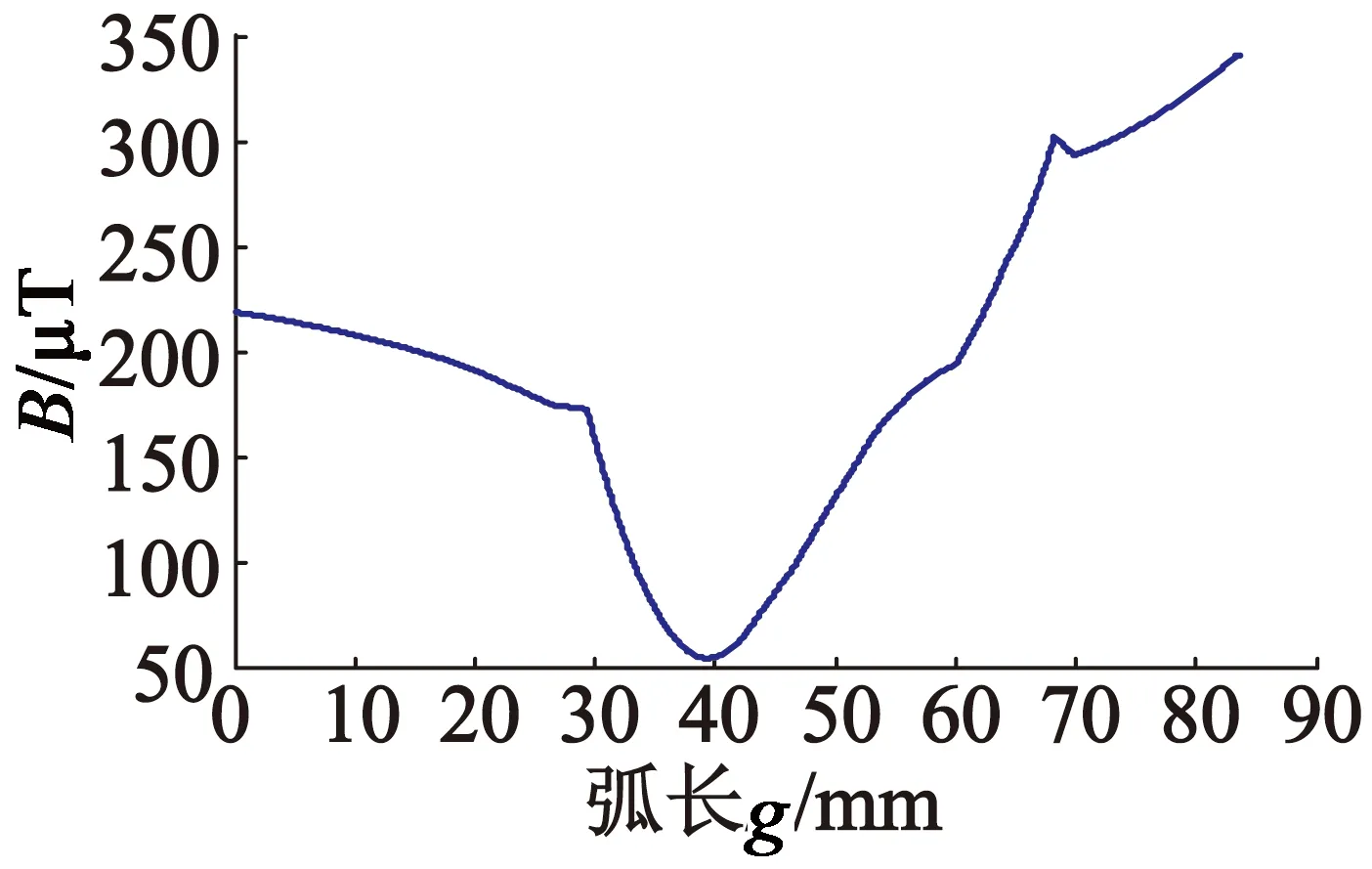
图9 转子永磁体在SA处产生的磁感应强度与角位移的关系图
转子的40个永磁体与转轴上检测系统中的永磁体相对静止,将其视为整体,通过有限元分析和拟合后得到磁感应强度变化更为规律如图10所示,基于此进行进一步的理论分析将会消除该项误差。
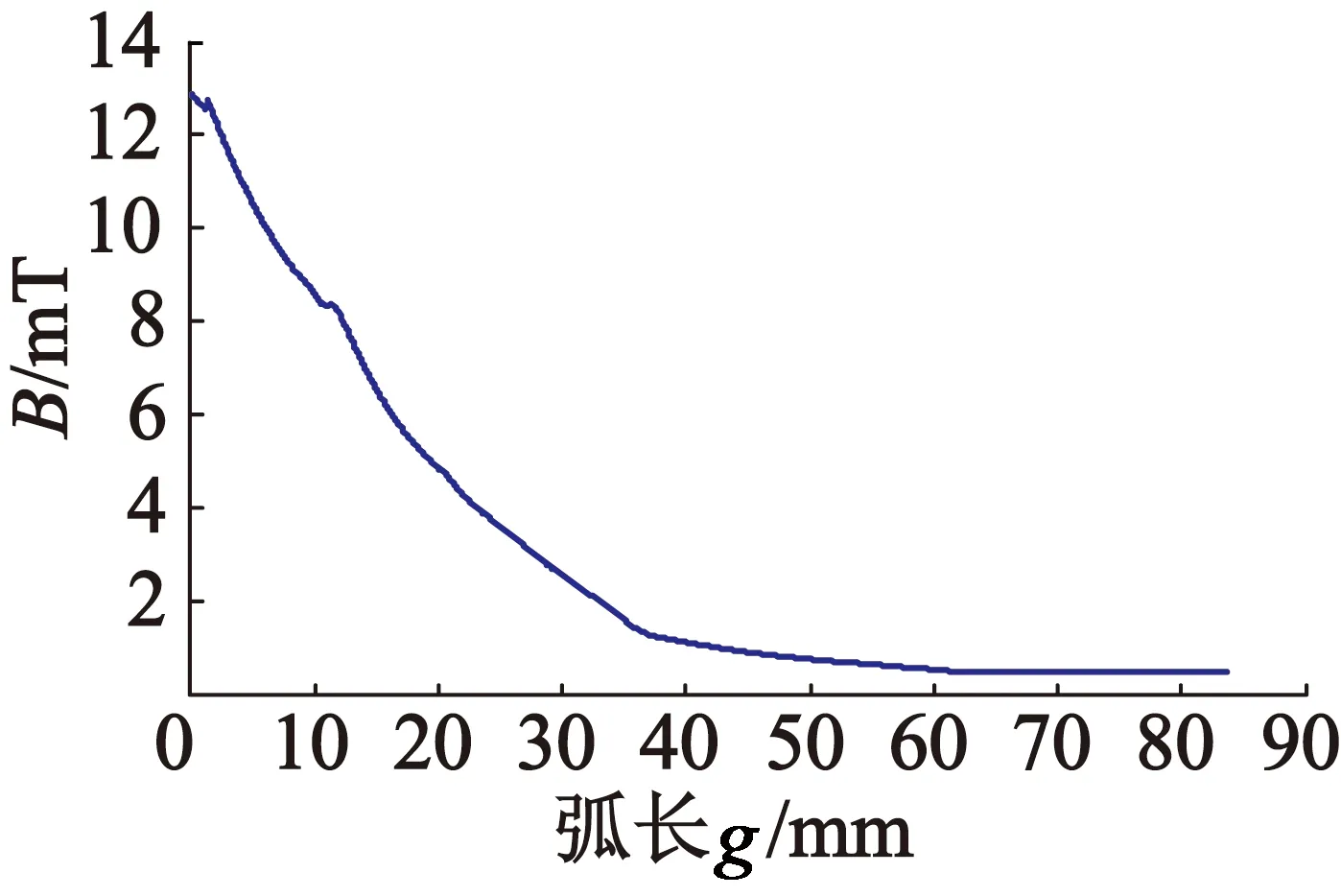
图10 组合永磁体在SA处产生的磁感应强度与角位移的关系
3.3 定子线圈对测量磁场的影响
通电线圈的励磁同样会带来影响。以A区域为例。在A区域内,选取距离传感器SA最近的通过电流1 A,1 200 匝的一个线圈。仿真如图11所示。从图11中看出,随着定子线圈中的电流变化,定子线圈在SA处产生的磁感应强度也随周期变化,且最大值均小于0.8 mT。
通过模拟通电策略下多个通电线圈磁场的叠加,可以模拟24个线圈对SA处产生的影响。在此不做赘述。
选取同样的一个定子线圈通过电流1 A,1 200 匝,其对转轴上传感器的影响随着时间、转轴倾斜角位移的变化如图12所示。
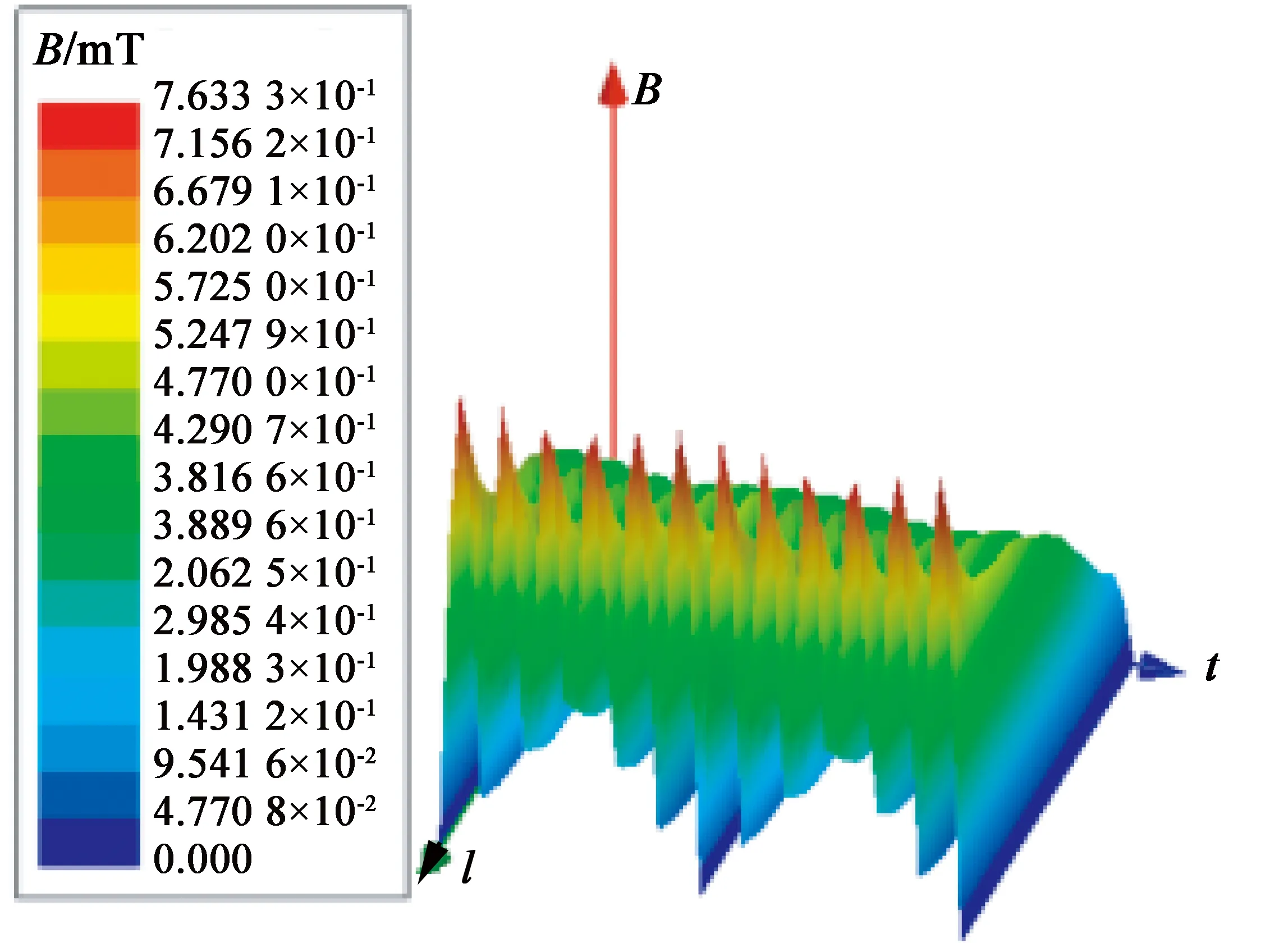
图12 定子线圈在转轴传感器处产生的磁感应强度
当转轴达到最大倾斜角且靠近所用线圈时,磁感应强度最大,为0.76 mT。这个值在一定程度上会影响数据处理和最终的位置检测的精确性。
3.4 转轴永磁体位置偏移对位置测量的影响
在实验中,永磁体不能镶嵌在转轴内,只能固定在转轴上,对于半径为r的永磁体,实际的转轴的空间位置与理论的位置相差的角度:
(10)
式中:l表示永磁体几何中心与转子球心之间的距离。计算的误差为4.17°。
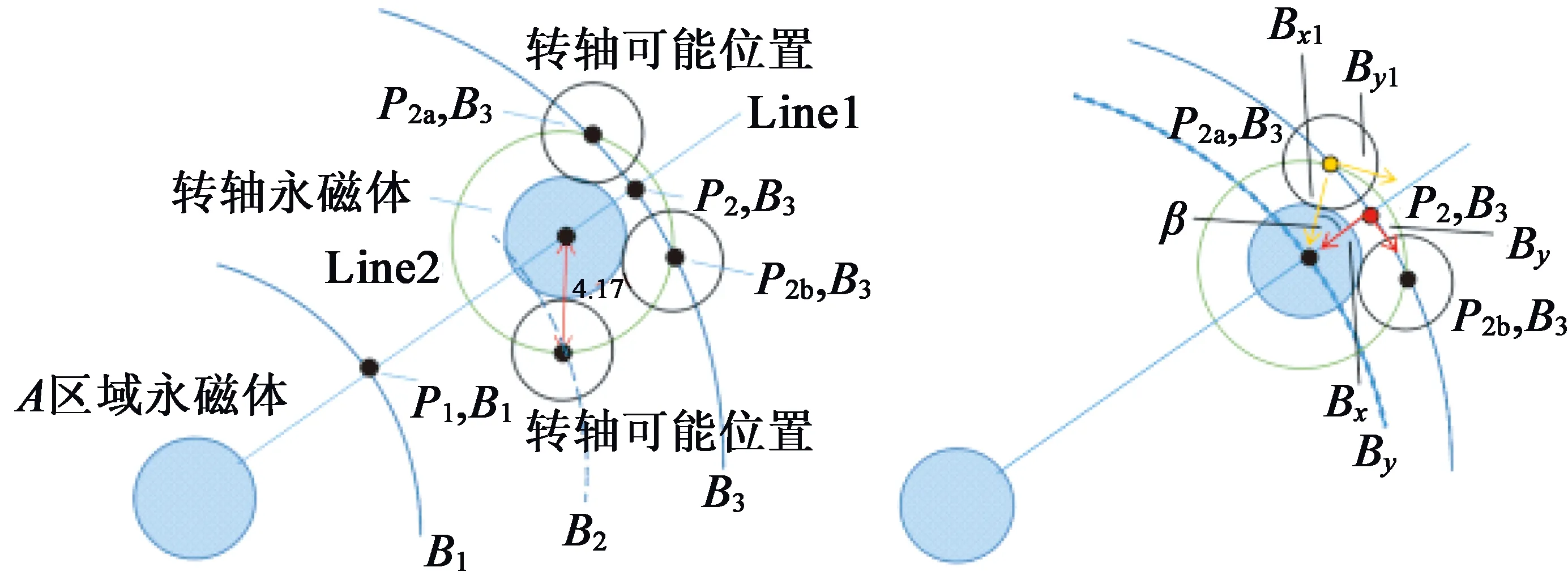
图13 转轴永磁体位置与误差说明图
在解算转轴永磁体的位置后,转轴位置的可能性如图13所示。以A区域为例,由前文可知,A区域永磁体在Line1上产生的磁感应强度随着不断远离永磁体而衰减,即B1>B2>B3。
假设在某个位置转轴传感器测量的磁感应强度为B3,可以确定位置为P2。在Line2上磁感应强度能达到B3的位置仅仅只有P2a和P2b两个位置。对于位于此位置传感器,A区域永磁体在此处的磁感应强度为B3。
考虑P2,P2a,P2b,由于Bz分量是沿着转轴且大小相同的,故在XY平面上的分量大小是相同的。需要确定转轴位于位置P2a或P2b。假设转轴位于位置P2a,在该点可以得到:
(11)
式中:β∈[-90°,90°]。
在图14中,当转轴传感器X方向朝向A区域永磁体时,α为直角,Bx绝对值分量最大,By分量最小。当By趋近于零时:
(12)
比较By1和Bx1的值,如果符号相反,则β为正,转轴位于P2a;否则转轴位于P2b。对于Bn>B3的情况同样适用。
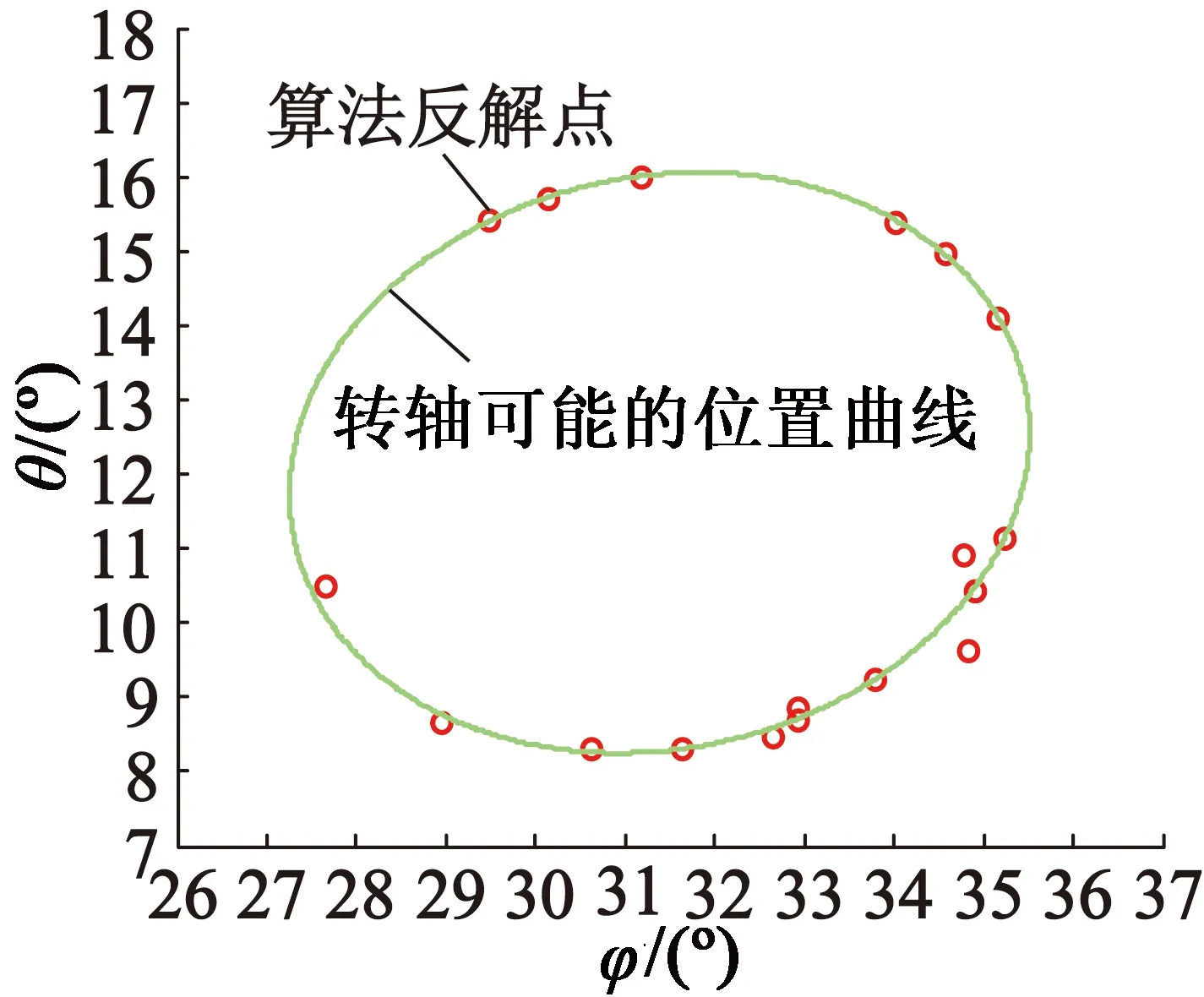
图14 永磁体位于某位置下转轴可能的位置和计算的位置
在图14中,任取永磁体处在φ=46°,θ=15°的中心位置,根据此时转轴在不同位置下传感器返回的数据进行测算,能得出此时转轴所在的真实位置。该算法能够有效地预防因为永磁体不能镶嵌在转轴内而带来的误差。
4 结 语
本文使用分布式磁偶极子法对径向充磁的圆柱形永磁体附近的磁感应强度变化进行了分析。以此为基础,模拟永磁体跟随转轴转动的情况,通过固定的磁感应强度传感器采集位置信息数据,通过坐标变换解算转轴空间位置,同时通过另一组转动的传感器和固定的永磁体解算转轴旋转的角度。仿真结果证明此方法的有效性。此外,通过使用单片机STM32F103C8T6和传感器MLX90363进行数据的采集,通过上位机的处理计算定位误差。同时本文对位置检测过程中的误差来源进行了全面的理论仿真分析。为球形电动机转子位置检测的发展和完善给予一定帮助。