智能三维技术在抽水蓄能电站测量中的应用
2019-02-12董云涛李宗华陈雨生张晓朋
董云涛,李 敏,李宗华,陈雨生,郭 巧,张晓朋
(1.保定易县抽水蓄能有限公司,河北省保定市 074200;2.广州南方测绘科技股份有限公司,广东省广州市 510000)
0 引言
随着“智慧地球”[1]等理念的相继提出,使得传统的二维地理信息已经难以满足现代信息化发展的需求。抽水蓄能电站的规划、建设和运营急需从传统上的二维技术提升到三维的高度[1]。在抽水蓄能电站前期的勘察与施工测量中,由于其山高坡峭,地形复杂,交通不便,甚至某些地方作业人员难以到达,传统的人工测量方法作业困难,效率低,精度得不到保障,离散的二维数据不能直观地反映实地地形,施工决策困难[2,3]。
随着三维技术的发展,机载激光雷达测量和无人机倾斜摄影测量[4]等高新技术的兴起,这些新技术越来越智能化、简单化,精度也越来越高,在许多领域已经代替了传统人工测量。因此,针对上述抽水蓄能水电站的建设困难与新需求,本文提出智能三维技术解决方案,并成功应用于某抽水蓄能电站测量项目。
1 智能三维技术方案
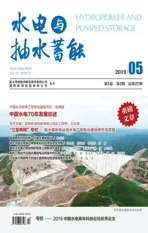
智能三维技术方案是利用无人机搭载激光扫描仪和相机,采集点云和影像,建立地面数字高程模型和三维实景模型,将点云、三维实景模型、数字高程模型等多源数据融合于三维可视化共享平台中,实现三维数据共享,辅助决策抽水蓄能水电站的建设(见图1)。
(1)采用高效的倾斜摄影和机载激光雷达新技术,对该抽水蓄能电站工程区进行原始地形测量,获取工程区域高精度三维地形数据,建立电站三维模型,作为施工建设的原始数字化依据,涵盖各处坐标点、高程等数据。
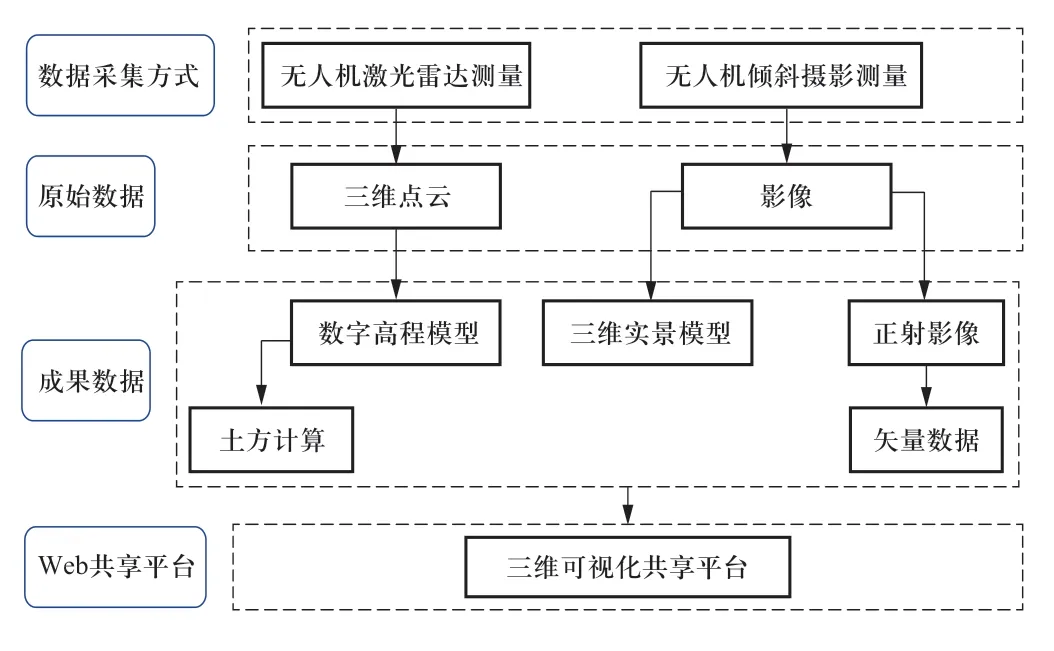
图1 智能三维技术方案Figure1 Intelligent three-dimensional technology solution
(2)对工程区范围内需要明挖和填筑的范围,将工程区域的道路、建筑、水库等三维测量数据与三维地形数据进行融合,计算土方,输出工程量分析报告,作为工程施工土石方明挖工程量计量的参考。
(3)建立多源数据三维可视化共享平台,通过Server端发布数据,Web端共享数据。实现模拟行人视角浏览三维数字化成果,以第一人称视角查看公路、建筑附近的地形地势,参考多源数据,确保施工辅助决策信息的可靠性。
2 关键技术
2.1 机载激光雷达技术
机载激光雷达技术(LiDAR)是一种激光扫描系统、全球定位系统(GPS)和惯性导航系统(INS)三种技术集成的三维数据采集技术,其作业效率高,精度高,能获取真实地面信息,是获取地球空间信息的高新技术之一[2]。机载激光雷达是一种主动式测量方式,不受光线影响,夜间也能作业;能穿透部分植被获取高精度的地面三维信息,从而获得山区真实数字地面模型;无需控制快速获取地形数据;数据处理高度自动化[5]。对于山区作业困难地区,植被覆盖较多情况,获取地面三维数据机载激光雷达技术无疑是一种最佳方式[6]。
机载激光雷达是利用GPS系统实时采集的位置信息,INS测得飞行姿态,激光扫描系统获取扫描头到激光脚点之间的距离。GPS数据和INS数据,结合地面基站在航迹处理软件例如Inertial Explorer中进行事后差分(DGPS),得到高精度的POS数据,通过点云解算软件例如SZTPointProcess,联合POS数据、激光数据和坐标转换参数解算生成点云。
由于航线规划,解算参数设置或者天气等原因,生成的点云可能存在漏洞、高程分层和平面偏移等现象,需要通过点云处理软件例如Terrasolid检查点云质量,如有漏洞则需补飞;对于高程分层和平面偏移问题通过Terrasolid的Tmatch模块校正,若误差过大难以校正需重飞。确保相对精度符合要求情况下,再利用参考面来校正点云的绝对精度。
校正点云后的点云提交给内业人员处理。利用Terrasolid添加不同的算法对点云进行自动去噪滤波(low points,Isolated points等算法)、分类(ground,below surface,by height from ground算法)提取出地面点。通过半自动分类工具人工干预分类提取出精确的地面点。再基于地面点建立不规则三角网,生成数字高程模型DEM,等高线,提高程点数据和计算土方量。机载激光雷达技术原理和工作流程(见图2、图3)。
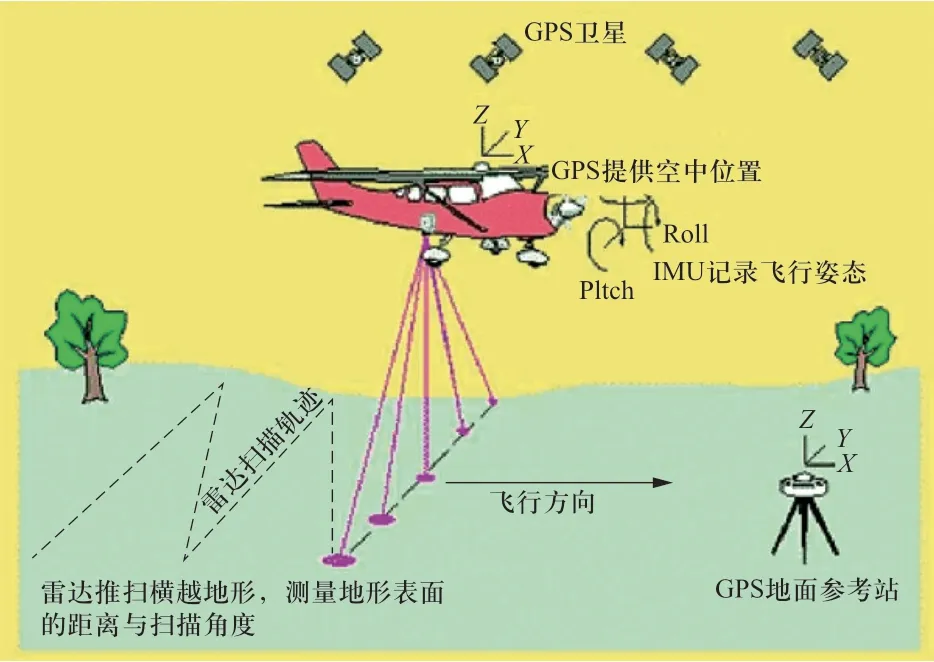
图2 激光雷达作业原理Figure 2 Principle of Lidar Operation
图3 机载激光雷达工作流程Figure 3 Airborne Lidar Workflow
2.2 倾斜摄影与三维实景建模
无人机倾斜摄影测量技术[7]是通过全球导航卫星系统 (GNSS)实时获取无人机位置 ,通过相机拍摄地物多角度的影像,为三维模型的建立提供更丰富、更真实的纹理信息和轮廓信息。三维模型成果的每一个像素都带有三维坐标,可以在模型上直接获取坐标、角度、坡度、面积、长度、宽度、高度等信息,直观地反映真实状况。无人机倾斜摄影测量技术是当今信息时代的重要产物,由于高效、精度较高,被广泛应用在各种领域的测量工作中。
无人机倾斜摄影技术原理和工作流程(见图4、图5),通过无人机搭载相机获取多角度的影像数据,结合GPS信息和地面像控点数据纠正影像,然后进行特征点匹配,提取出不同影像中相同位置的特征点,基于特征点进行自动空中三角测量,算出外方位元素和特征点坐标,再生成密集点云,构建不规则三角网(TIN),通过影像全自动纹理映射构建三维实景模型,也可以从密集点云中提取DEM生产正射影像[8-10]。常见的生产软件有Capture context(CC)和Inpho。

图4 倾斜摄影建模原理Figure 4 Principles of Oblique Photography Modeling
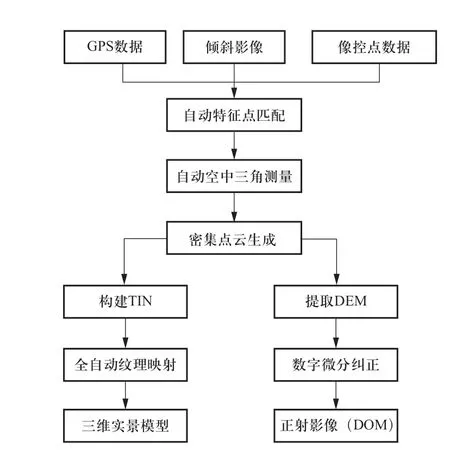
图5 倾斜影像工作流程Figure 5 Oblique photogrammetry workflow
2.3 三维可视化共享平台
三维可视化共享平台架构(见图6),包含数据处理PC端,Server管理端,共享Web端。其基于Java开发语言,采用跨平台统一开发框架,集成二三维一体化技术,融合激光点云、倾斜摄影三维实景模型、BIM、数字高程模型、矢量等多源异构数据。解决了CAD设计成果与三维空间信息平台无缝集成,实现了信息一体化集成表达和共享。
多源数据成果数据在PC端进行格式转换,轻量化处理,然后导入Server服务端储存,基于不同用户和不同的需求,通过Server服务端设置不同的数据和权限,分享发布,直接打开分享链接在Web端浏览,分析和应用成果数据。基于三维可视化平台Web端的多源数据切换浏览,自由视角浏览,设置轨迹飞行浏览,以第一人称视角查看地形地势,通过获取任一点的三维坐标,测量距离、高度、表面积、角度等工具来确保施工辅助决策信息的可靠性。
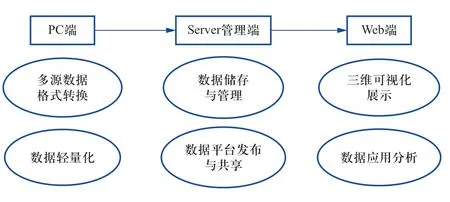
图6 平台架构Figure 6 Platform structure
3 实际工程应用
3.1 工程概况
该抽水蓄能电站测区有效范围为4.07 km2,主要包括上水库区域、下水库区域、场内公路区域等。测量任务为采集项目范围(见图7)高精度地形数据和建立高精度三维实景模型。测区面积约7.6km2,最大高差约500m,地形复杂,高山陡峭,植被较多,交通不便。

图 7 项目范围Figure 7 Project region
3.2 数据采集与处理
3.2.1 数据采集
该项目利用大疆M600pro无人机搭载SZT-R250激光雷达设备见表1和自带相机传感器的大疆精灵4pro(见表2),并行作业,按预先设计的航线分别分区采集点云数据和影像数据。同时,在地面控制点上架设GNSS基站通过事后差分来减小无人机GPS定位误差,保障GPS定位的准确性。
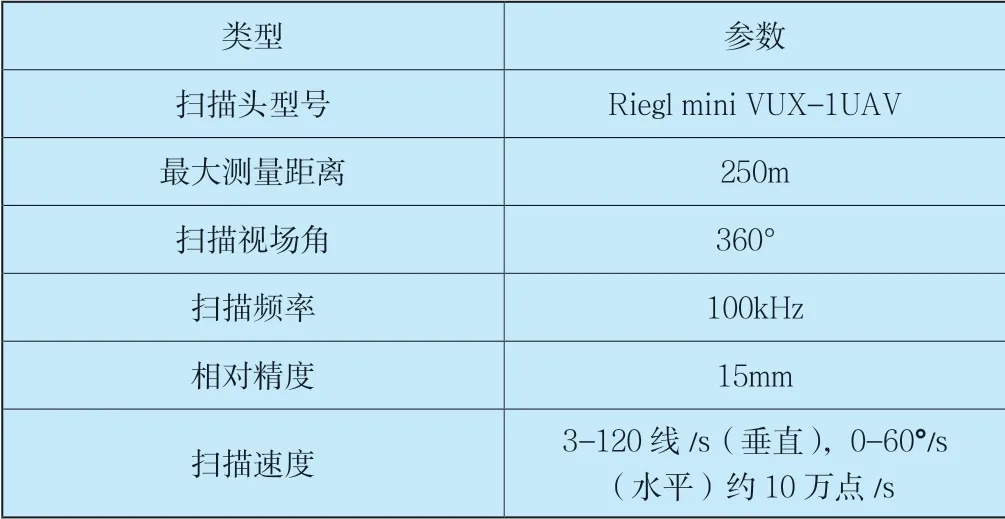
表1 SZT-R250扫描仪参数Table 1 SZT-R250 scanner parameters

表2 大疆精灵4 pro参数Table 2 DJ Phantom 4 pro parameters
3.2.2 数据处理
(1)点云数据处理。
外业采集的原始数据通过点云解算软件得到点云。检查漏洞、点密度、高程分层、平面偏移等问题。校正点云后,利用Terrasolid的Tscan模块设置不同的算法对点云进行自动去噪滤波、分类,提取出地面点[见图8(a)]。针对该项目的地形复杂,高差较大的情况,采用分区处理方法。将点云分为地势较高区域和地势平坦区域,分别利用不同的参数算法处理,小部分区域分类效果不佳需要通过半自动分类工具人工干预分类提取出精确的地面点。再基于地面点建立不规则三角网,生成数字高程模型DEM[见图8(b)]。
(2)影像处理。
在三维实景建模ContextCapture软件中导入外业采集的影像和POS数据,设置相机参数,利用像控点纠正影像位置,然后进行影像匹配、像点量测、空三加密、多视影像密集匹配、三角网的构建及纹模型自动理映射等全自动处理,最终输出三维实景模型[见图9(a)]和正射影像DOM[见图9(b)]。
3.3 精度检查与分析
采用RTK银河1 plus在测区内重点区域采集100个作为点云的检查点,将检查点导入Terrasolid中通过点云内插出高程与检查点高程进行比较,点云高程精度统计(见表3)。

图8 点云成果Figure 8 Point cloud data product

图9 倾斜摄影成果Figure 9 Oblique photography product

表3 点云高程精度统计Table 3 Elevation accuracy statistics of point clouds

表4 三维实景模型精度统计Table 4 Accuracy statistics of 3D scene models
由上表可知点云高程最大误差为13.4cm,平均误差波动幅度7.1cm,高程中误差为7.9cm优于15cm,满足1:500点云精度要求的最高标准。
采用RTK联测测区附近控制点后直接测量检测点坐标。按测区范围有效工作区,沿主要硬化道路和建筑物明显地物点均匀实地选取。采集43个检查点与三维模型相对应的地物点进行坐标检查。模型精度统计(见表4)。
表4可以看出三维模型的平面误差都集中在0~10cm内,整体平面精度为4.7cm;高程方面大部分误差在0~10cm内,少部分误差在10~20cm内,极个别的山区模型误差超过20cm,整体高程精度为7.7cm。整体的平面精度满足1:500三维模型精度要求。
3.4 成果共享
数字高程模型、数字正射影像、三维实景模型、点云以及矢量等项目成果数据经过处理后储入Server服务器中,分享Web端链接。在三维可视化平台Web端(见图10)中通过切换多源数据和浏览方式例如以第一人称视角(见图11)查看地形。利用分析工具辅助判断和决策。
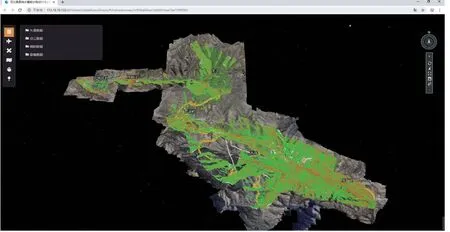
图 10 三维可视化平台Web端Figure10 Web terminal of 3D visualization platform
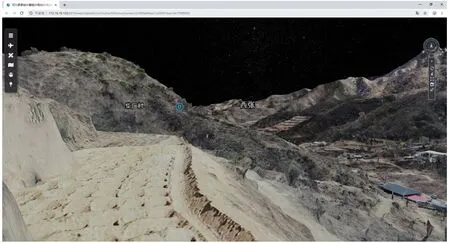
图 11 第一人称视角Figure 11 The view of first person
4 结束语
智能三维技术方案融合了多种先进技术,在该抽水蓄能项目应用中充分体现了智能化生产的高效优势。在保证精度的情况下,克服了传统测量的困难,数据从二维提升到了三维,使得数据应用更加广泛,辅助施工建设的决策更加明确。尤其在地形复杂,植被较多,人员无法到达的区域有着明显的优势。其应用价值得到了充分的验证,在后续新建抽水蓄能电站中具有借鉴意义。