超声波测距系统在拆垛机器人上的应用
2019-02-04曹明张苗苗刘凯凯
曹明 张苗苗 刘凯凯
摘 要:针对超声波测距在拆垛机上应用时容易发生测距跳变的问题,采用了一种简单高效的算法进行滤波处理,具体过程是通过STM32控制KS103超声波测距,STM32单片机将滤波后的数据通过232总线上传给上位机,上位机控制拆垛机运动。试验测试表明,通过该滤波算法后,KS103超声波测距在拆垛机上,在0~1200mm之间的数据传输误差不超过0.8%,提高了拆垛机的工作精度。
关键词:拆垛机 超声波测距 中值滤波 通讯
中图分类号:TP24 文献标识码:A 文章编号:1672-3791(2019)11(c)-0095-02
在一些袋装物料仓库内,大部分袋装物料的存储是通过机器码垛或者人工码垛的方式码放在托盘上,而出仓时是通过叉车将托盘一起运送出去,然后由人工拆垛装车。随着人工成本的提高,这种出仓方式不仅成本高,而且效率低。现提出一种全自动拆垛机,拆垛机采用的是直角坐标系,该类机器人适用于各种自动化加工设备,多应用于码垛、搬运、拆垛、检测等工作环境;其拥有的Y、Z各轴相互独立,线性计算控制简单;工作区域固定不易受现场环境影响;一般直角坐标系机器人使用寿命长,且便于维护。具体工作过程:当拆垛机Z轴、Y轴都在停留在起始位置时,首先检查物料是否到位,物料到位后,测距仪开始工作,等待距离探测结束后,上位机判断距离是否在允许的范围,如果在允许的范围内,Z到达指定位置,Y轴开始刮板运动,否则YZ轴不运动。
拆垛机工作的中心环节是测距仪的测距以及数据的传输。测距以及传输的稳定性直接影响到拆垛机的工作效率及可靠程度。选择测距仪的工作要求是约束角小,测距准确,不易受环境的影响,选择数据传输的方式一定要稳定可靠。
1 测距仪的类型的选择
在工业生产和日常生活中,经常会碰到一些需要接触式和非接触式测距的场合,而在工业中经常用到的非接触式测量距离的有红外测距传感器、电涡流测距传感器等。
(1)红外测距传感器。激光红外测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离[1]。但是该测距价格相对较高,增加拆垛机的成本,而且容易受到光照条件的影响。
(2)电涡流测距传感器。电涡流测距仪是利用电涡流效应原理设计的用来测定物体间距离、位移、速度等参数,电涡流测距传感器的测量范围较宽[2]。但只能适应于检测导电金属材料,而拆垛机是面对的是袋装物料,属于不能产生涡流的非金属材料。而且涡流效应的影响因素多,对于拆垛机复杂的工作环境不适用。
(3)超声波测距。超声波测距原理主要是利用超声波传感器向外发射超声波的时候开始计时,经过超声波在空气中的传播,遇到障碍物后返回到超声波传感器,超声波传感器一旦再次接收到反射的超声波后计时器立即终止工作,超声波传感器结构灵巧,对所检测的物体没有什么特殊的要求,在工业方面应用比较广泛。
综上说述,超声波测距在自动拆垛机上应用比较合理。
2 KS103超声波工作过程
2.1 KS103超声波测距在拆垛机上的工作过程
自动拆垛机上主要用的通信方式是232通信和IIC通信,STM32控制KS103超声波传感器进行探测距离,当KS103超声波传感器采集回来的数据存储在STM32中。当拆垛机需要距离的时候,工控机会通过232总线给STM32发送信号,将采集回来的数据上传给工控机。
2.2 中值濾波处理
由于在现场测量距离时各个袋子之间有一定的距离间隔或是机器的抖动,每次探测的距离容易发生跳变,所以为了保证机器的安全运行,下位机的滤波处理显得尤为重要。针对跳变这个问题,现采用中值滤波算法。
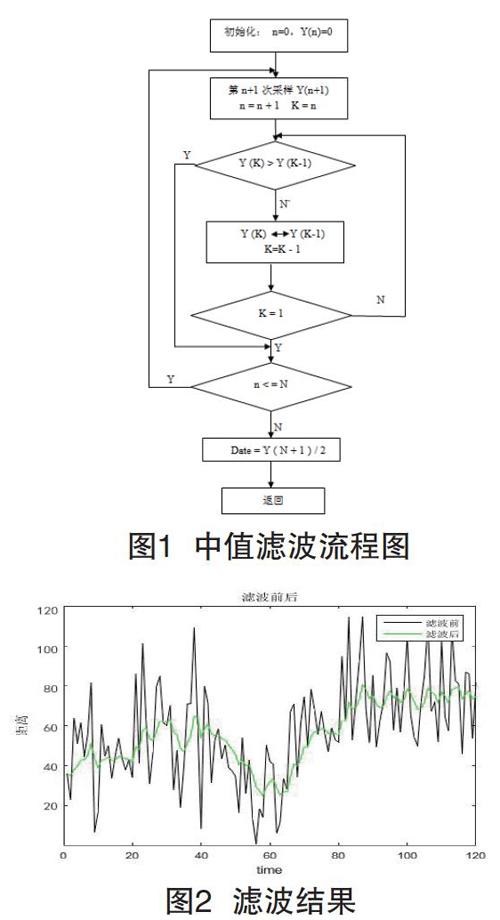
中值滤波的基本原理是把数字图像或数字序列中的一点的值用该点的一个邻域中各点值的中值代替,让周围的像素接近真实值,从而消除孤立的噪声点[5]。对于数字序列使用的方法是把每一个数据用它周围邻域一定数目的数据的中值替换。具体流程图如图1所示。
3 实验数据采集与分析
将采集回来的数导入MATLAB中生成曲线图,由图2看出没有滤波的结果和有滤波的数据曲线相仿,上下跳变的幅度缩小,说明在测量时一些跳变的数已经通过中值滤波算法筛选掉。如图2所示,黑色曲线表示没有加滤波的超声波测试结果,浅灰曲线是加上滤波后的结果,试验表明通过程序算法可以把一些比较大的数值去除掉,充分证明了算法的真实可靠性。
4 结语
该文主要介绍了一种超声波在拆垛机上的应用,由IIC总线通过STM32控制,采集回来的数据再由STM32通过232总线上传给工控机,在该过程采用的中值滤波算法主要是过滤掉由于机器晃动或偶然间采集到的袋子空隙之间距离的异常数据。在MATLAB软件下,由曲线可以看出采用算法前数据波动很大,而采用算法后数据缓和,所以该算法在拆垛机上应用有效。
参考文献
[1] 尚君莹,田学民,陈洁萌.脉冲激光测距系统及其算法研究[J].电子设计工程,2015(11):99-101.
[2] 袁希光.传感器技术手册[M].北京:国防工业出版社,1986.
[3] 徐恕宏.传感器原理及其设计基础[M].北京:机械工业出版社,1989.
[4] 黄全品,王绪本.一种高效的基于阈值的图像滤波算法及其实现[J].计算机仿真,2005(5):111-114.
