智能视觉车底安检便携移动平台
2019-01-29公安部第一研究所徐常星
■ 文/公安部第一研究所 徐常星
山东神博数字技术有限公司 郭守学
关键字:车底扫描成像 图像比对 AGV控制 车牌识别
1 引言
伴随着我国经济快速发展,国民生活水平逐步提高,机动车辆的保有量急剧增加。根据公安部交管局发布的最新数据,截至2017年底,中国机动车保有量达3.10亿辆,其中汽车2.17亿辆;机动车辆便利了人们的生活,同时也带来了许多安全问题。犯罪分子利用机动车辆携带危险和违禁物品,标志性的汽车炸弹恐怖袭击,已经成为全球范围内令人困扰的问题,因此,如何对车辆进行高效全面的安全检查已经成为当务之急。
近年来,世界上恐怖袭击事件数量加剧,汽车炸弹以其易隐蔽、改装简便、获取的渠道多和杀伤力巨大等特点,已经成为恐怖袭击的主要手段。恐怖分子很多时候会把爆炸物隐藏在汽车的底部,从而躲避执法人员的检查,进而对政府机关办公场所、民航机场、港口、车站、军事机构及基地、驻外使馆、检查站、银行、珠宝及贵金属加工厂矿、科研及保密场所、大型会议及活动造成了严重的威胁。因而,高效灵活的车底安全检查成为预防此类问题的主要手段。
2 车底检查现状
当前车底的检测主要分为固定式、移动式和便携式。固定式主要是针对长期需要车底检测的特殊场所,如油库,军事基地,使馆和监狱等。常用的固定车底检测设备如图1所示:
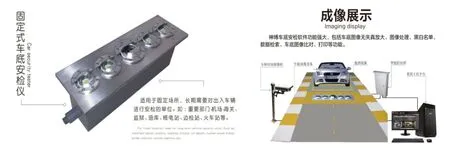
图1 固定式车底检测设备及其安装方式
移动式主要适用于临时或者短期需要车底检测的场所,如大型会议,大型赛事和重要外事活动。移动式车底检测将固定式车底检测进行了精简,常见的移动式车底检测如图2所示:

图2 移动式车底安检设备及其应用场景
便携式车底检查,大多使用手持式的车底安检镜,即由工作人员手执一个带有长柄的反光镜深入被检车辆的底部,并对反光镜中车辆底盘的情况进行观察,以发现可疑物品等目前针对个别车辆的检测主要是通过人工来进行检测,如图3所示:

图3 反光镜及车底检测的范例
为了应对更加复杂的应用场景,本文提出了一种基于移动式AGV小车的便携式智能车底检测平台,该平台具有较好的灵活性,能够填补固定式和移动式的不足,满足日益复杂的车底安检需求。
3 便携式移动平台组成
智能便携式移动平台的整体结构如图4所示:
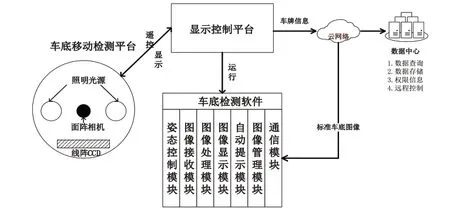
图4 便携式安检移动平台组成图
车底移动检测平台:借助线阵CCD相机和面矩阵相机分别完成车底图像的采集和局部特征图像的提取。
显示控制平台:车底检测软件运行的载体,完成车底图像的数据传输和结果判定。
车底检测软件:包括姿态控制模块、图像接收模块、图像处理模块、图像显示模块、自动提示模块、图像管理模块和数据库。
数据中心:主要存储车牌对应的车底标准图像,负责数据索引,数据存储,权限管理及远程控制,将需要查询的车底图片进行回传。
3.1 车底移动检测平台
车底移动检测平台行进路径由视觉系统计算得出,在检测时需要将移动平台放置车辆前部,检测软件获取到车辆前部图像,通过车牌识别来确定移动平台前进的方向,具体流程图如图5所示:
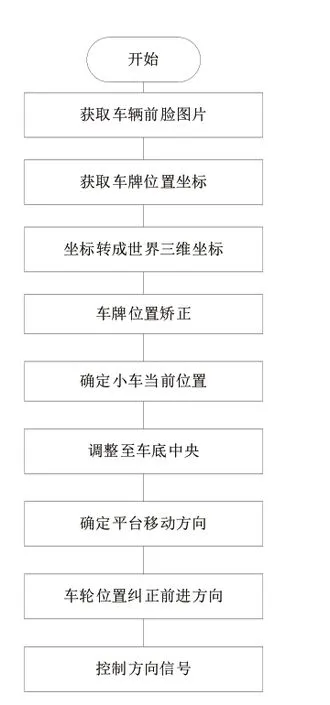
图5 车底辅助直线行驶流程
车牌是确定平台中央位置的关键,本文平台借助机器学习框架,实现对车牌的识别和定位,将车牌信息转变成坐标信息,如图6所示:

图6 车牌位置的定位
上图中绿色内容为标定的车牌坐标和宽高度的信息。
移动平台相机为已标定的摄像机,标定的作用是确定现实三维成像坐标系到摄像机成像坐标系的转换关系,进而根据公式(1)可计算出坐标点的坐标:
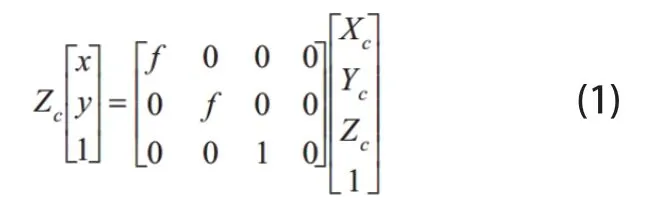
其中,为点在图像中的位置坐标,为空间点P在现实坐标系中的坐标,针孔相机成像如图7所示:
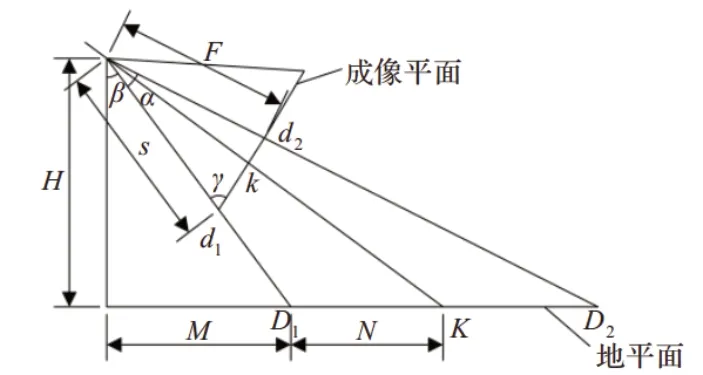
图7 针孔成像示意图
根据针孔成像的原理,使用公式(2)可以计算出车牌边缘点上的点距离小车的位置:
微调平台,实时计算四个边角到移动平台的距离分别为,根据差值来调整平台位置,直至满足公式(3):

保证小车的中心位置,与车牌经过转变后的中轴在同一直线上,进而保证移动平台开始位置为车辆的中轴,得到图像运行辅助线如图8所示:

图8 计算得出的中心线
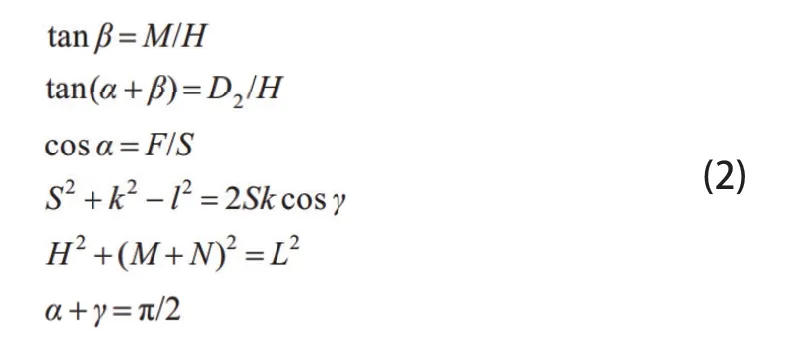
移动平台的整体结构和内部方向控制模块,如图9所示:
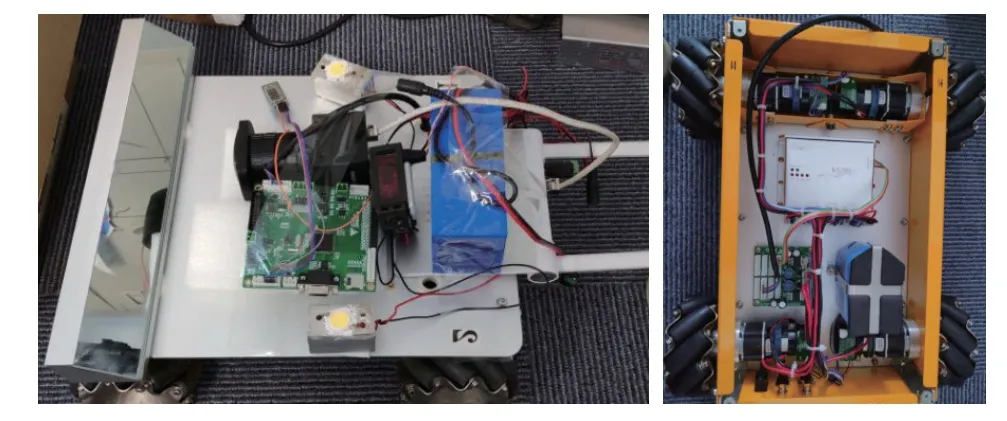
图9 移动平台相机模块和万向转向
平台使用的是万向轮,因而能够对平台的位置进行微调,同时借助于伺服电机保证平台在车底的直线运行。
3.2 车底成像模块
图像采集模块由线阵CCD相机、面阵相机、反射镜和照明光源组成。负责车底补光,以及采集车底全景图像和局部实时图像。
线阵CCD相机负责车底全景图像采集,采用高清宽动态摄像机,为后期图像拼接与增强处理提供高质量的素材。拟选用DALSA SG-32线阵彩色CCD相机。
照明光源。由于车辆底盘处于背光处照明条件较差,需要引入高亮度LED补光灯为CCD成像系统提供足够的照明。本系统要求图像连续采集,且要求重复性要好,照明系统必须保证长时间提供稳定的照明,鉴于车底大部分部分不会反光,本模块采用两条条形荧光光源,从前后两个方向照射,以保证去除阴影和光源亮度的均匀。光源采用特制变频荧光灯,光谱范围:0.38-0.78um,色温:6500k,显色性:>80,开口亮度是普通荧光灯的两倍,开11角度1200,功率为30W,尺寸:甲26mmx100mm,寿命:2000小时。
反射镜。由于车辆底盘的高度有限,为了提高系统的适用性必须降低整个系统的高度,为保证CCD成像系统中复杂的光路系统有足够的空间,利用了反射镜将光路系统横向布置,在保证光路系统的空间的同时有效降低了系统的高度。
面阵相机用于车底局部实时图像拍摄,采用三轴云台相机配防抖减震装置,显著提升画面的稳定性和减少图像抖动带来的影响。整体效果图如图10所示:

图10 相机与反光镜模组
3.3 图像处理模块
图像处理模块中比对算法是车底安全检查的核心。目前常用的图像比对算法有直方图匹配、图像模板匹配、PSNR峰值信噪比比较、感知哈希算法及特征点匹配等算法,各种匹配算法在特定的领域有着独特的优势。基于车底相机的成像原理,在成像过程中由于司机在驾驶车辆行驶过程中的不确定性,得到的车底检测图片可能出现拉伸进而导致图片的形状发生变化,传统基于区域统计匹配不适应于此场景,因此本平台提出了一种多特征融合的图像比对算法,来完成车底图像匹配。
本平台图像比对算法主要针对车底标准图像和实时车底图像。首先将根据采集的车牌到数据库中查询车辆的标准车底图片,而后将标准图像和采集后的图像进行如下的流程处理,比较两张图片差异,处理流程如图11所示:

图11 图像处理流程
图像对比模块算法如下:
(1)对两张图像进行滤波处理,使用3x3大小的SIZE框对图像的进行中值滤波,过滤掉图像中的噪点;
(2)将得到的图像进行自适应对比度的增强;
(3)提取图像的特征描述点,根据特征点的坐标信息,形成局部特征点的LBP特征,将图形的坐标和局部LBP特征级联作为该点的特征描述子,过程如图12所示:

图12 局部特征点描述子的提取过程
(4)统计图像中的特征描述子,按照坐标递增顺序,建立图像的特征编码;
(5)将获取到的实时图像,按照步骤(3),(4)进行特征描述子的矩阵,根据图像特征描述子的位置和方向对应关系,得到两幅图像的特征位置匹配关系,进而计算出两者之间的仿射矩阵M,如图13所示:
图13 根据图像匹配得到仿射矩阵
(6)由(5)中得到的放射矩阵M,将得到标准图像中的特征子编码映射到实时图像中,根据对应点的坐标位置按照步骤(3)计算周围15x15的特征直方图分布,使用巴氏距离,来计算两者的相似度如下图14所示:

图14 图像相似度计算
经过实际测量发现时,认为两者相同,否则认为两者不同,将其作为差异点标出,如上图蓝色圆圈标注;
(7)将(6)中点进行聚类,得到两张图片具有差异的区域,将对应区域进行标注,得到结果如下图15所示:

图15 部分差异图片结果
(8)统计实时图像是否出现了差异位置,若无差异位置将实时图像进行特征描述子编码,并上传到数据中心;若有差异则提示检测人员。
3.4 通信模块及报警模块
通信模块主要基于2.4GHZ的通信处理模块,完成由车底相机成像到上位机的传输,同时完成上位机对移动平台的控制,上位机通过无线网络传输的方式到数据中心查询车辆的标准图片。
报警模块主要采用蜂鸣或上位机软件弹窗的方式来进行提示。通过声音和闪框的方式,能够提高软件和检查人员之间交互,防止漏检情况的发生。检测人员异常图片进行标注后,上传到云端数据库,完善云端数据库中的异物的类型,为后续基于深度学习的可疑物品检测提供数据支撑。
4 车底检测软件
通过移动平台实时采集后的图像通过无线通信模块,上传到车底检测软件中,上位机软件完成从云端数据的检索,车底指纹的查询并返回,依据返回图像进行图像匹配检测。图16展示了车辆发现隐藏物品的展示结果,上方为实时采集后的图像,其中红色框为与车底图像有差异的区域,左下角为弹窗警告,提示当前车底存在异物,需要检查人员进行二次检查和后续处理。
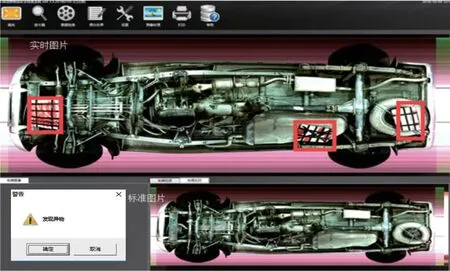
图16 车底检测软件检测效果
5 结语
通过实际测试,使用该平台能够有效的检测出车辆在车底携带的对比度较大的异物,而对于较小的或者隐藏在内部的异物,检测效果不够理想,这也是视觉检测系统目前的挑战,后续可以基于深度学习和深度图像辅助来提高车底异物检查的精度。
本移动便携平台提升了车底检测的灵活性,特别是针对大型车辆或者存在着较大嫌疑的目标,移动平台可以通过手工和自动两种方式远程操控,保证检测人员的安全,可适应单一车辆和大型停车场;同时轻便易于携带,布置时间快,处理准确,大大提升车底检查的效率。
