Smart3D和Photoscan无人机摄影测量精度与效率的比较研究
2019-01-22
(天津师范大学 天津 300387)
一、绪论
(一)选题的背景及意义
无人机摄影测量技术现已广泛应用在测绘、应急响应、环境保护和土木工程等领域。由于无人机飞行姿态不稳定、像幅小以及受常搭载非专业相机等因素的影响,得到的影像往往畸变复杂,采用传统的摄影测量软件处理无人机影像不仅耗费的时间长[6],而且对航片要求较高,因而得不到满意的结果。在此基础上,衍生了无人机摄影测量影像处理软件,在国内主流的处理软件有Smart3D、Photoscan、DP Grid、IPS4.0等,这些软件具有大范围、快速、自动构建三维模型以及生成地形图、DEM、DLG、DSM等地理相关信息成果的功能。现有的研究大多针对摄影测量系统本身,对处理软件的测评相对较少。
本课题的研究区域是天津八仙山自然保护区和天津师范大学主校区。用Smart3D和Photoscan处理同一区域的无人机影像,对得到的空三精度和处理所需时间进行比较,进而评价其精度和效率。
(二)国内外研究现状
和传统的测量相比,无人机的机动性、安全性、灵活性往往更高[7]。但与传统测量一样,无人机摄影测量在拍摄的过程中易受到地形和气象气候条件的影响[8],影像会畸变度杂、旋偏角大,传统的后期处理软件无法达到预期效果[1]。此外,无人机摄影测量应用的领域,对处理软件的效率和精度有着特殊的要求,由此产生了多种无人机摄影测量影像处理软件,国内常用的有Smart3D、Photoscan、Inpho5.7等[2]。
三维实景建模实际上是基础图像的三维重建,因为航拍影像上储存的二维信息包括了多幅影像中共同物体的物理特征及所对应的几何关系[3],所以软件可以应用影像匹配技术来寻找同名点,实现空中三角测量计算。
针对我国城市建设快速发展的现状,研究人员赵潇[4]提出三维数字城市建模技术,旨在应用无人机倾斜拍摄技术来解决传统摄影测量导致的工作量大、建模时间长产生的效率及经济问题。学者李亚星研究了Smart3D在风景园林中利用无人机获取航空影像后的处理方法,以及实景三维建模的应用[6]。
Photoscan构建三维模型的过程可以分为四个阶段。在第一个阶段主要完成相片对齐,Photoscan搜索相关照片并匹配他们的同名点,根据同名点在两幅影像上表达的不同位置可以得到每个画面传感器的位置和相机的标定参数;第二个阶段是导入控制点,形成稀疏点云,控制点的选取应该是均匀分布的。第三个阶段是根据稀疏点云和精确的控制点坐标对自动进行空三解算和加密。最后一个阶段是生成输出结果,Photoscan会通过三维多边形网格来表示测区,根据需求输出成果[3]。
Smart3D实景三维建模流程主要包括三个阶段。第一阶段是空三加密,软件对从影像中选取的大量控制点进行多角度同名点匹配来解算外方位元素来得到无人机航带的飞行情况、空三点的位置密度以及影片的相对位置。第二阶段是加入控制点,为了生成的模型更准确,加入控制点之后可以选择再次进行空三。进行两次空间不仅提高了效率,还可以检查出其他问题。最后一个阶段是建立模型覆盖纹理输出成果。
航空摄影规范要求测量之前使用地面监控站软件进行航摄技术参数设计,主要包括航高,像片重叠度,航线参数[5]。研究人员黎治坤、郑史芳、刘锐、黄小川对Pixel Grid、DP Grid、PHOTOMOD、Inpho、IPS进行测评的时候,对数据准备、空三测量、正射影像获取三个阶段利用到的资源利用、软件功能、成果质量为对比指标,横向对比了几个软件[2]。低空数字航空摄影对于摄影测量有着明确的规定,一般航测影像重叠度为60%~80%,最小应大于53%[9];旁向影像重叠度一般为15%~60%,最小应大于8%[10]。
因为每一项资产的方差是有限量,∃C≥0,使得当N→+∞时,明显有以下结论:但第二项不会趋于0,因为其中为资产i与资产j协方差的算术平均值,将上式代入公式(2)后变型,显然可得:
二、研究方法与技术路线
(一)研究方法
无人机加载非量测像机进行倾斜摄影测量,其模型精度取决于空三的精度[11]。因此,评价Smart3D和Photoscan的精度,关键是对两个软件空三误差进行比较。
空中三角测量简称空三加密,是三维建模的重要组成部分[12]。空中三角测量包括影像匹配、绝对定向、测量平差、成果输出等步骤。空三加密是利用RTK测量的控制点坐标,采用光束法区域网平差的方法解算出内方位元素和外方位元素。空三加密完成后,航带的信息,飞机的飞行情况,影像的相对位置都可以显示出来。
空三精度代表着最终成果的质量,因此可以用空三精度的比较两个软件的精度。空三精度的评价指标有很多,最常用的是是RMS of 3Derrors(3D误差)、RMS of horizontal errors(高程误差)、RMS of vertical errors(平面误差)。
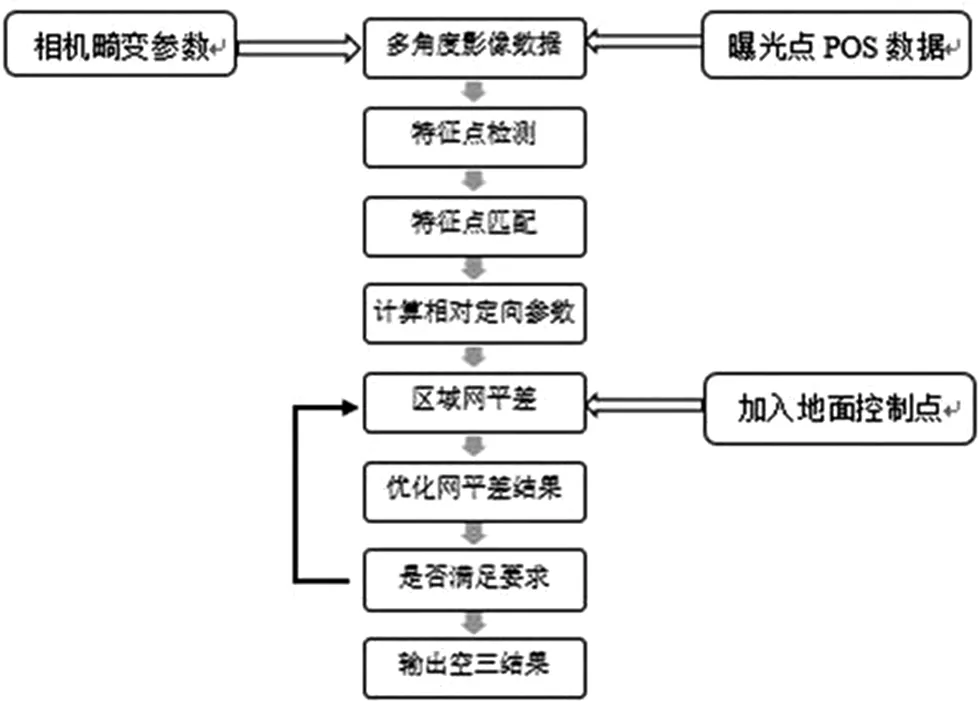
图1 空三加密流程图
(1)多角度影像数据是由相机拍摄的倾斜影像。
(2)特征点检测、匹配是指由软件自行进行同名点匹配,各个软件特征点检测的方法不尽相同,这也是空三精度不一样的主要原因之一。
(3)计算相对定向参数是指描述立体像对两张影像像对位置和姿态关系的参数。需要在两张有一定重叠度的影像中进行。
(4)加入控制点后,由于观测时的不稳定或是其他因素会使观测值不准确,进行区域网平差(如果开始没有导入POS数据就是自由网平差),平差可以使数据非常接近真实值,误差更小,结果更准确。
三、实验与分析
(一)八仙山的影像处理
1.测区概况与数据获取
天津八仙山位于天津市蓟县东北部,影像是搭载NIKOND810拍摄,照片数为1198,飞行高度为1500米,测区面积58.1平方千米。天津市八仙山的控制点由GPS静态联测获得,由于地形原因,布设控制点8个,实际使用6个。
2.实验结果分析
在区域网的条件下,用两个软件对八仙山的影像进行处理,比较精度和效率(结果见表1);

表1 软件处理八仙山影像的精度和效率
无人机摄影测量的出现让森林山地三维模型的建立有了可能。森林山地地形需要更多的影像才能建立更精准的模型,然而植被覆盖率高,地形相似率高,影像的同名点匹配难度更大,应该加入更多的控制点来建立模型,但由于山地森林固有的特点,难以获取地面控制点,会增加测量的误差,对测量的精度会产生很大影响。因此,选择合适的软件降低误差提高模型的精度对森林山地等地形尤为重要。
在进行第一组实验的时候,首先要利用无人机获取测区的影像。在测区内,利用RTK测量特征点的位置,由于地形因素,只有6个控制点可用。精度结果显示,Smart3D的误差是0.091m,Photoscan的误差是0.317m,Smart3D的精度在森林方面要高于Photoscan。用于测量这部分的地形,可以优先考虑Smart3D。
(二)天津师范大学的影像处理
1.测区概况与数据获取
天津师范大学测区地势平坦,高程差在一米下,为测量提供了良好的条件。控制点是用RTK测量的,精度为厘米级。天津师范大学控制点共有布设控制点51个,倾斜影像处理时实际使用45个,其中14个控制点和31个检查点,而下视影像处理时只使用30个控制点。
天津地处华北平原,地势平坦,因此飞行航高设定在200米,航线采用南北航向,航向与旁向重叠率均大于50%。采用SONY ILCE-QX1拍摄,相机镜头焦距20毫米。相机通过四个镜头,分别从垂直向下,斜向左、斜向右、斜向后四个角度对地面进行拍摄。每张相片的分辨率为5230*4030。
2.倾斜影像处理结果分析

表2 天津师范大学倾斜影像处理的精度和效率
结果在处理空三的阶段,Photoscan所需时间要长于Smart3D,这是因为Photoscan在导入照片之后有对齐照片的功能,这会剔除重叠度小于50%的相邻影像,这类影像由于缺少同名点做参照,无法恢复地物和影像之间的相对位置。即使控制点足够多,Photoscan的误差要远高于Smart3D的误差,因此处理倾斜影像主要考虑使用Smart3D。
3.下视影像获取与控制点分布
天津师范大学的下视影像是2015年由无人机平台搭载NIKOND810(非量测型相机)相机拍摄。影像分辨率为7360*4912,相机镜头焦距20毫米,光圈值为f/5,ISO感光度为ISO-250。在Photoscan和Smart3D中选取同样位置的30个特征点,其中9个控制点和21个检查点。
4.下视影像处理结果分析

表3 天津师范大学下视影像处理的精度和效率
针对第三组对比试验,对齐照片对Photoscan的效率产生很大的影响,但是处理正射影像Photoscan的误差要小于Smart3D的误差。
四、结论与展望
本次研究对Smart3D和Photoscan的空中三角测量的精度和效率进行评价,根据软件得出的空三精度误差和软件所需时间进行了三组对比。首先,对于山地森林地形,Photoscan对于此地形的精度低于Smart3D,Photoscan与Smart3D的数据处理效率相当;其次,对于城市区域,在对下视影像的处理方面,Photoscan与Smart3D精度相当,而Smart3D的效率更高;在处理倾斜影像方面,Smart3D更为精确、高效;第三,Smart3D的倾斜影像处理精度优于下视影像处理精度,而Photoscan下视影像处理精度优于倾斜影像处理精度。综上,处理山地森林区域下视影像时,Smart3D和Photoscan的效率和精度相当;处理城区倾斜影像时,考虑到精度和效率应优先选用Smart3D;处理城区下视影像的时候,出于效率考虑可优先选用Smart3D,出于精度考虑可优先选用Photoscan。
本文通过对Smart3D和Photoscan对不同地物的空三测量精度作出评价,分析可能产生误差的原因,如软件本身,控制点数量,地物差异等等,这对后期成果的精度很重要。在今后的工作中要尽量避免空三误差过大,影响摄影测量成果,提高效率。但研究还存着很多不足,例如软件测评应该选取更多的区域来比较,像建筑密集等地,此外,评价指标也应该更多样。
