基于直升机地面共振要求的起落架刚度及阻尼优化设计
2019-01-18吴靖胡国才柳泉刘湘一
吴靖,胡国才,*,柳泉,刘湘一
1. 海军航空大学 航空基础学院,烟台 264001 2. 海军航空大学 91206部队,青岛 266108
直升机起落架的刚度及阻尼对其地面状态的动稳定性影响较大,必须确保直升机开车至起飞离地以及着陆至完全停车整个过程都不会发生地面共振,因此研究满足地面共振稳定性要求的起落架刚度及阻尼对直升机动力学设计至关重要。
不管是陆地还是舰面[1-3]状态,轮式或滑橇式起落架直升机[4-5]的地面共振研究通常是在已知起落架刚度及阻尼的情况下,对直升机进行地面共振分析[6-8],验证是否满足稳定性要求。也有通过分析起落架刚度及阻尼对地面共振稳定性的影响,来获得对起落架进行优化设计的有益指导[9-12]。但关于满足直升机地面共振稳定性要求的起落架刚度及阻尼优化设计的研究较少,一般依据直升机着陆缓冲性能要求初步确定起落架刚度及阻尼,再根据地面共振要求对刚度及阻尼进行修正[13-15];米里[16]提出以直升机滑跑时的不稳定中心与工作转速重合,并拥有足够阻尼裕度为要求的起落架刚度和阻尼选择方法;顾仲权[17]提出以起落架需用阻尼最小为优化目标,主要约束条件为在给定旋翼转速范围内机体模态满足阻尼裕度要求,最小模态阻尼比是通过特征值法求解模态阻尼后,在共振转速附近寻找的方式获得,该方法对于求解最小模态阻尼比过于繁琐,且未考虑机体模态满足转速裕度要求的情况。
本文给出了机体模态非稳区临界转速以及与旋翼摆振后退型模态共振转速下机体模态阻尼比的计算方法,据此提出了满足地面共振稳定性的机体固有频率及阻尼要求。通过建立机体模态频率及阻尼与起落架刚度及阻尼的关系,给出了满足地面共振稳定性的起落架刚度及阻尼要求。基于上述稳定性要求,在满足着陆缓冲性能要求的起落架刚度及阻尼范围内,以减小起落架需用阻尼且增大机体最小模态阻尼比为优化目标提出了对刚度及阻尼进行优化设计的方法,并对某型直升机进行了实例验证。
1 满足地面共振要求的机体特性
1.1 非稳区临界转速和共振区模态阻尼计算
在进行直升机动力学设计时,避免地面共振一般有2种方法:① 使机体模态与旋翼摆振后退型模态耦合非稳区远离工作转速;② 有足够的阻尼确保耦合系统在工作转速范围内不会产生地面共振[13-14]。根据上述方法进行地面共振设计的关键是要确定非稳区临界转速和共振区模态阻尼。在桨毂中心有水平运动的机体模态与旋翼摆振后退型模态的共振转速Ωr有如下关系:

对于桨叶摆振欠阻尼情况,根据式(1a)可得共振转速计算公式为
(2)
由于研究的是满足直升机地面共振要求的机体特性,因此考虑旋翼桨叶摆振阻尼较大的情况,此时危险模态是机体模态,要确定其临界转速,就需要知道其模态阻尼在共振区附近随旋翼转速Ω的变化情况。由旋翼机体耦合系统的特征方程是难以解出模态阻尼的显式表达形式,根据机体模态阻尼在非稳区附近的变化趋势构造机体无阻尼时的模态阻尼比函数为

(3)
式中:系数A、B、C和D通过式(4)确定。
(4)

由式(4)确定的各系数为
(5)
某直升机旋翼采用黏弹减摆器来提高桨叶的摆振阻尼,在3种摆振幅值状态下,其复模量如表1 所示。
采用式(3)计算机体无阻尼时其模态阻尼比在非稳区的变化情况,与采用特征值法求解的模态阻尼比对比如图1所示。

表1 减摆器复模量Table 1 Complex modulus of damper

图1 机体无阻尼时的模态阻尼比Fig.1 Modal damping ratio without fuselage damping
由图1可知,针对桨叶不同摆振情况,式(3)均能较好地拟合机体无阻尼时其在非稳区的模态阻尼比,最大误差为7.08%,说明了式(3)的准确性,可用于下一步确定非稳区临界转速。由图1中也可以看出,随着桨叶摆振幅值减小,黏弹减摆器储能模量增加,摆振固有频率增加,与机体模态耦合转速增加,不稳定中心右移;黏弹减摆器耗能模量增加,摆振阻尼增加,机体模态阻尼增加,稳定性增加。
机体有阻尼时共振区附近的模态阻尼比为
σ(Ω)=σ0(Ω)+σfb
(6)
由式(4)和式(6)推导可知,共振点的机体模态阻尼比σ(Ωr)=(cf-cfr)/(2mfbωfb),当cf>cfr时,即机体阻尼大于最小需用阻尼时,共振点的机体模态阻尼比大于0,也就表明机体模态不存在非稳区。
根据σ(Ω)=0可确定机体模态非稳区下界Ωl和上界Ωh分别为
(7)
采用式(7)计算机体取不同阻尼时直升机地面共振非稳区临界转速的变化情况,与通过特征值法确定的结果对比如图2所示。
由图2可知,针对桨叶不同摆振情况,式(7)均能较好地拟合机体取不同阻尼时的临界转速,最大误差仅为3.54%,说明了式(7)用于计算非稳区临界转速的准确性。该方法避免了通过求解不同转速下的特征值再根据特征值寻找临界转速的繁琐,可为后续采用优化算法进行起落架刚度及阻尼的优化设计节省大量时间。

图2 非稳区临界转速Fig.2 Critical rotation speed in instable area
1.2 机体频率及阻尼要求
在进行直升机地面共振设计时,首先考虑是否能使机体模态与旋翼摆振后退型模态共振区远离工作转速,即确保机体模态非稳区下界Ωl≥ηΩmax,其中Ωmax为旋翼最大工作转速,η为下界转速裕度,一般取1.2[19]。
在难以使所有机体模态均满足上述要求的情况下,可以考虑使机体低阶模态非稳区上界Ωh<μΩe,其中Ωe为旋翼额定转速,μ为上界转速裕度,在其足够小时,旋翼旋转动能很小,在旋翼加速过程中就有可能通过非稳区而不会激起大幅度的振动,一般取0.4[19]。
若不能满足上述2种情况,则需要提供足够的阻尼确保机体模态阻尼比σ(Ω)≥ε,其中ε为阻尼裕度,一般取0.02[20]。
综上所述,满足地面共振稳定性的机体非稳区临界转速及共振点模态阻尼比的要求,即机体频率及阻尼须满足的要求为
(8)
满足式(8)要求的具体判断流程如图3所示。

图3 满足稳定性要求的判断流程Fig.3 Judgment process meeting stable requirements
2 起落架刚度及阻尼设计
2.1 机体运动特性与起落架刚度及阻尼的关系
为根据式(8)对起落架刚度和阻尼提出满足地面共振稳定性的设计要求,需要建立起落架刚度及阻尼与机体频率及阻尼的关系。首先,建立机体地面状态的运动模型,支持在起落架上的机体简图如图4所示。
根据分析可知,机体运动x、z和φy相互耦合,机体运动y和φx、φz相互耦合,在直升机地面共振分析中,机体纵移和横移以及俯仰和滚转模态较为重要,该4阶模态与垂向平动和扭转模态耦合较弱,令机体纵向运动X1=[x,φy],机体横向运动X2=[y,φx],可得与地面共振相关的4阶 机体模态的无阻尼自由运动方程为
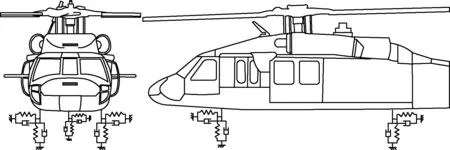
图4 直升机简图Fig.4 Helicopter diagram
(9)

(10)

(11)
式中:ω1=[ωx,ωφy]和ω2=[ωy,ωφx]分别为机体纵向和横向运动前2阶模态固有频率。
由于满足地面共振稳定性的机体特性要求是根据当量至桨毂中心的平面模型得出的,因此需将机体模态质量及阻尼当量至桨毂中心,根据文献[6,21]研究可知机体模态的瞬心位置、当量质量和当量阻尼分别为
(12)
式中:zh为重心至桨毂中心的垂向距离;z1(i)和z2(i)分别为机体纵向和横向第i阶模态瞬心距重心的垂向距离;m1(i)和m2(i)分别为机体纵向和横向第i阶模态当量至桨毂中心的质量;c1(i)和c2(i)分别为机体纵向和横向第i阶模态当量至桨毂中心的阻尼;cxf、cyf、czf和cxa、cya、cza分别为前后起落架3个方向的等效阻尼。
2.2 起落架刚度及阻尼优化方法
令刚度k=[kxf,kxa,kyf,kya,kzf,kza],阻尼c=[cxf,cxa,cyf,cya,czf,cza],优化目标为减小起落架的需用阻尼,且增大机体最小模态阻尼比,因此,目标函数可定义为
f(k,c)=
(13)
式中:ωbe为额定转速下桨叶的摆振固有频率。
基于直升机地面共振稳定性要求的起落架刚度及阻尼优化设计可描述为
(14)
式中:kmax和kmin分别为起落架刚度的上下边界值,cmax和cmin分别为起落架阻尼的上下边界值,由直升机着陆缓冲性能要求及具体的起落架构型确定。
嵌入寻优策略的优化流程如图5所示,寻优策略是针对连续域的优化算法,如蚁群算法、遗传算法或粒子群算法等,满足的结束条件是达到最大迭代次数或目标函数值达到给定要求。

图5 起落架刚度及阻尼的优化流程Fig.5 Optimization of landing gear stiffness and damping
3 实例仿真
实例计算中,旋翼减摆器取大扰动幅值(26 mm) 下的阻尼,旋翼主要参数如表2所示,直升机选择小重量前后重心及大重量前后重心4种状态,起落架采用后三点布置,不同状态下机体及各位置参数[22]如表3所示。
以支柱式起落架为例,其纵横向刚度主要取决于轮胎的纵横向刚度,起落架的各向刚度为
(15)
式中:kbu为缓冲支柱等效刚度;kxt、kyt和kzt分别为轮胎3个方向上的刚度,由于前后起落架计算形式相同,式(15)以及式(16)不区分前后起落架。
根据某型轮胎刚度数据,对文献[23]中轮胎刚度计算公式进行修改,得
(16a)
kyt=B1w(p0+0.24pr)·
(16b)
(16c)
式中:d为轮胎外径;w为轮胎宽度;δt为轮胎垂向压缩量;p0为轮胎充气压力;pr为轮胎额定充气压力,pr=0.25pb,pb为轮胎最小爆炸压力;A1~A3、B1~B4和C1均为拟合系数。

表2 旋翼参数Table 2 Rotor parameters

表3 机体及位置参数Table 3 Fuselage and location parameters
针对某型轮胎,其垂向刚度确定后,根据地面平衡方程可计算其垂向压缩量,由式(16a)可确定充气压力,轮胎纵横向刚度可由式(16b)和式(16c)计算。因此,需要优化的刚度为缓冲支柱刚度及轮胎垂向刚度,k=[kfbu,kabu,kzft,kzat],根据着陆缓冲性能要求给出各刚度范围为:kmax=[780 900, 860 100, 1 435 900, 1 194 500] N·m-1,kmin=[254 300, 198 000, 458 800, 451 500] N·m-1。
该直升机轮胎在一定压缩量范围内,其当量阻尼系数与垂向压缩量关系不大,主轮3个方向上的当量阻尼系数分别为0.188、0.125和0.204,尾轮3个 方向上的当量阻尼系数分别为0、0.205和0.237, 尾轮由于没有刹车,不考虑其纵向刚度及阻尼。轮胎阻尼与其刚度相对应,需要优化的阻尼为缓冲支柱阻尼,c=[cfbu,cabu],根据着陆缓冲性能要求给出各阻尼范围为:cmax= [503 000, 1 058 800] N·s·m-1,cmin= [3 600, 2 000] N·s·m-1。
采用的优化算法为粒子群算法,种群规模为18,初始种群采取均匀随机分布策略,迭代次数为40,各状态下计算10次的迭代结果如图6所示,优化所得刚度及阻尼如图7所示。
由图6可知,所采用的优化算法对该问题的收敛性较好,迭代40次均能收敛到最优值,直升机在4种重量重心状态下的最优值分别为0.939 7、0.935 5、1.124 4和1.120 8。

图6 不同重量重心下的迭代结果Fig.6 Iteration results of various weights and gravity centers

图7 优化刚度及阻尼Fig.7 Optimized stiffness and damping
由图7可知,4种状态下优化所得缓冲支柱阻尼均为cmin=[3 600, 2 000] N·s·m-1,即最小缓冲支柱阻尼也能使该直升机满足式(8)的稳定性要求。尾缓冲支柱刚度具有分散性:小重量前重心时分布于198 000~248 000 N·m-1,后重心时分布于198 000~259 000 N·m-1,大重量前重心时分布于198 000~282 000 N·m-1和703 000~860 100 N·m-1, 后重心时分布于198 000~295 000 N·m-1和760 000~ 860 100 N·m-1;主缓冲支柱刚度均为最小值254 300 N·m-1,主尾轮垂向刚度均为最大值,分别为1 435 900 N·m-1和1 194 500 N·m-1。通过分析可知,以上情况下4阶模态中横移模态阻尼比最小,为使其尽量增大,要求该阶模态频率减小且阻尼增大,这就要求主起落架垂向刚度尽可能小,而尾起落架由于距重心横向距离为0,其垂向刚度对横移模态没有影响,也就出现了优化后主缓冲支柱刚度最小,而尾缓冲支柱刚度具有分散性,但不同重量重心状态下都对应不同刚度范围,并不是在整个优化范围内分散,若尾缓冲支柱刚度不在上述范围时,具有最小阻尼比的模态将会变成纵移模态,而尾起落架垂向刚度对纵移模态将会产生影响。另外,机轮垂向刚度的增加使其垂向阻尼相应增加,横移模态阻尼也将增加,所以优化后的机轮垂向刚度达到最大。对于尾缓冲支柱刚度的选取应该使得机体横移和纵移模态以及俯仰和滚转模态频率尽量分开,综合4种重量重心状态考虑,尾缓冲支柱刚度取小值效果较好。
因此,选取刚度k=[254 300, 198 000, 1 435 900,1 194 500] N·m-1及阻尼c=[3 600, 2 000] N·s·m-1,通过特征法计算系统模态频率及阻尼随转速的变化情况,机体各模态与旋翼摆振后退型模态共振转速及最小阻尼比如表4所示。
由表4可知,4种重量重心状态下,机体低阶模态横移和纵移模态与旋翼摆振后退型模态的共振转速均小于0.4Ωe=103 r/min,最小模态阻尼比均大于0,不存在非稳区,满足式(8)中的稳定性要求;机体高阶模态俯仰模态与旋翼摆振后退型模态的共振转速位于0.4Ωe=103 r/min~1.2Ωmax=310 r/min之间,但最小模态阻尼比大于2%,满足式(8)中的阻尼裕度要求;机体高阶模态滚转模态与旋翼摆振后退型模态的共振转速大于1.2Ωmax=310 r/min,最小模态阻尼比大于0,不存在非稳区,满足式(8)中的稳定性要求。
综上,说明优化计算所得的起落架刚度及阻尼能使该直升机在4种重量重心状态下均满足地面共振稳定性要求。
以大重量后重心为例,通过特征法计算系统模态频率及阻尼比随转速的变化情况如图8和图9 所示。为观察直升机旋翼与机体耦合对系统模态的影响,图8和图9中 还给出了旋翼与机体非耦合时的模态频率及阻尼,如图8和图9中虚线所示。
由图8和图9可知,直升机旋翼与机体的耦合会使系统各模态频率及阻尼发生变化,在旋翼摆振后退型模态与机体模态共振转速附近,模态阻尼会发生相互“排斥”的现象,使得其中阻尼较小的模态阻尼降低,若模态阻尼在旋翼机体耦合因素的影响下降低至负值,则会引发系统的地面共振动不稳定现象。

表4 共振转速及最小阻尼比

图8 大重量后重心时的模态频率Fig.8 Modal frequencies with large weight and back gravity center

图9 大重量后重心时的模态阻尼比Fig.9 Modal damping ratio with large weight and back gravity center
需要注意的是低转速(Ω<150 r/min)时,旋翼摆振后退型和前进型模态频率无法分开,而该2阶模态阻尼却呈现较大差异,该现象可通过独立旋翼运动方程的特征值[19]解释:
(17)
旋翼低转速时,如果桨叶摆振刚度较小,而摆振阻尼较大,就会形成过阻尼的情况,上述特征值将变为
(18)
由式(18)的特征值虚部可知,在上述情况下,旋翼摆振后退型及前进型模态频率均等于旋翼转速Ω,考虑旋翼与机体耦合的影响后,结果会有一定差异,如图8所示;而由特征值实部可知,摆振阻尼的增加,可能会使得低转速时的摆振后退型模态阻尼降低,如图9中的摆振后退型模态阻尼在低转速时就比较小。但是,随着转速增大,桨叶摆振固有频率会增加,且由于减摆器非线性的影响,在相同幅值扰动下,摆振阻尼会降低,这都会使得摆振后退型与前进型模态频率逐渐分开,特征值由式(18)回归式(17)。
4 结 论
1) 针对机体无阻尼时构造的非稳区机体模态阻尼比函数能较好地拟合桨叶不同摆振状态下机体模态阻尼比随转速的变化,据此给出了机体模态非稳区临界转速的计算方法,由该方法计算机体不同阻尼情况下的临界转速,最大误差仅为3.54%,说明了该方法的准确性。
2) 基于直升机地面共振稳定性要求,提出了对起落架刚度及阻尼进行优化设计的方法,采用该方法对某直升机4种重量重心状态下起落架的刚度及阻尼进行优化,结果使得机体各阶模态均满足地面共振稳定性要求:机体横移和纵移模态与旋翼摆振后退型模态的共振转速均小于0.4Ωe,最小模态阻尼比均大于0;机体俯仰模态与旋翼摆振后退型模态的共振转速位于0.4Ωe~1.2Ωmax之间,但最小模态阻尼比大于2%;机体滚转模态与旋翼摆振后退型模态的共振转速大于1.2Ωmax,最小模态阻尼比大于0。