某典型飞行器模型俯仰/滚转两自由度耦合动态气动特性
2019-01-18赵忠良杨海泳马上蒋明华刘维亮李玉平王晓冰李乾
赵忠良,杨海泳,马上,蒋明华,刘维亮,李玉平,王晓冰,李乾
中国空气动力研究与发展中心 高速空气动力研究所,绵阳 621000
复杂的多自由度全方位高机动可控安全飞行是现代先进飞行器研制不断追求的基本战术指标[1-3],但飞行器在高机动飞行过程中,飞行特征、姿态角、角速度和角加速度等运动参数不仅随时间剧烈变化,而且存在两个自由度甚至多自由度的耦合飞行。此时,飞行器存在非常复杂的多涡系结构、非对称分离、涡破裂、激波/漩涡相互干扰等流动现象,导致气动力呈现迟滞、突变与分叉的非线性动态特征,并严重依赖于运动的时间历程、自由度、角速度、角加速度、振幅和频率等参数,呈现出十分强烈的多自由度动态气动力特性,这种复杂的动态气动力特性可能会导致多自由度耦合的非指令运动[4],威胁飞行安全,严重时造成飞行失败或机毁人亡[5]。所以,为了实现飞行器高机动可控飞行的设计目标,掌握其动态气动力特性,尤其是多自由度耦合条件下的动态气动力变化规律十分必要,从而达到有效评估飞行的动态品质,建立精确描述飞行器气动性能的数学模型的目的,开展动力学特性仿真分析和飞行控制律设计,充分发挥飞行器机动飞行的战技指标,推动飞行器研制的创新发展。
正是由于飞行器研制的迫切需求,自20世纪80年代以来,动态气动力及其多自由度耦合的动态气动力特性一直是关注的热点、发展的重点和需要突破的关键技术之一,主要针对先进飞机以及未来五代机飞翼布局的单自由度动态气动力、两自由度动态气动力、机翼突然失速、自由滚转等特性开展研究,建立了较为成熟的风洞试验技术和数值计算方法[6-17],形成了较为全面系统的研究能力。美国在飞行器动态气动力特性研究方面起步较早,并且采用70°三角翼、F-16、F-18HARV 验证机为研究对象,开展了大量的单自由度、多自由度及其耦合的动态气动力特性研究,形成较为完备的研究手段和能力,也实现了大迎角静、动态气动力与飞行力学的有机统一,为飞行试验的顺利进行提供了准确的飞行控制数据库[8,18];俄罗斯TsAGI建立的俯仰、滚转和偏航三自由度动态试验装置[19]、德国在DNW风洞建立的六自由度模型支撑装置[20]、英国Bristol大学建立的五自由度动态装置[21]都可以通过风洞试验来模拟飞行器多自由度运动,从而研究飞行器模型的多自由度动态气动力特性。国内南京航空航天大学、北京航空航天大学、航空工业空气动力研究院、中国航天空气动力技术研究院和中国空气动力研究与发展中心都具备了风洞动态试验研究能力[22-31],但能够查阅到公开发表资料的只有南京航空航天大学开展了三角翼模型和某飞机模型的两自由度动态气动力特性研究[32-33],而有关高速部分的相关研究在国内外几乎都是一片空白。所以,面对未来先进飞行器研制的多自由度动态气动力数据的急迫需求,开展高速风洞模型两自由度动态气动力特性研究十分必要。
本文主要针对某典型的四代机布局模型,利用中国空气动力研究与发展中心高速空气动力研究所FL-26风洞专用的俯仰/滚转两自由度动态试验装置,开展单自由度和两自由度俯仰/滚转耦合运动的动态气动力特性研究,综合对比分析单/双自由度动态气动力特性的变化规律及其两自由度的耦合特性,掌握其动态气动力变化特征,为未来先进飞行器研制的试验需求、数据获取、品质分析等奠定技术基础。
1 研究模型与试验设备
1.1 研究模型
研究模型选取某典型的四代机布局为原型,进行局部修型处理,便于尾部支撑,模型缩比为1:21,全长约0.95 m,主翼展长约0.62 m。模型主要由脊形前体、鸭翼、边条翼、主机翼、双立尾、双腹鳍和两侧进气道组成,采用7075铝合金骨架与碳纤维复合材料制造,模型在风洞的阻塞度约为0.4%(0°迎角)。
1.2 试验风洞
风洞试验是在中国空气动力研究与发展中心高速空气动力研究所FL-26风洞进行,该风洞是试验段横截面为2.4 m×2.4 m的半回流、暂冲引射式跨声速风洞,配备了全模、半模和张线支撑槽壁等试验段,全模试验段四壁开孔,综合开孔率为4.3%,上下可调0~10%,左右固定4.3%。半模试验段开孔率上下可调0~12%,左右固定3%。试验马赫数Ma范围为0.3~1.2,1.43,迎角范围为-22°~22°,侧滑角范围为-12°~12°。
1.3 试验装置
试验采用FL-26风洞专用的俯仰/滚转两自由度动态试验装置进行,该装置通过支撑基础集成安装在风洞张线试验段顶部,使用三相异步电机实现俯仰振动驱动,顶部的偏心轮转盘通过连杆机构与快速拉起装置的摇杆机构连接,形成四连杆机构,从而驱动摇臂带动横梁进行俯仰振动运动,安装在横梁上的试验装置、天平和模型也实现俯仰振动,达到研究模型动态气动力或俯仰/滚转耦合的目的。同时,风洞侧壁两侧安装快速拉起驱动装置,使用两台伺服电机同步驱动实现静态变迎角与快速拉起试验研究,自由摇滚装置和强迫滚转装置可以安装在支撑横梁上。所以,试验系统具备了静态变迎角、快速拉起、单自由度动态、俯仰振动(或快速拉起)/自由摇滚耦合、俯仰振动(或快速拉起)/强迫滚转动态等试验研究能力。图1给出了试验装置结构原理示意图。
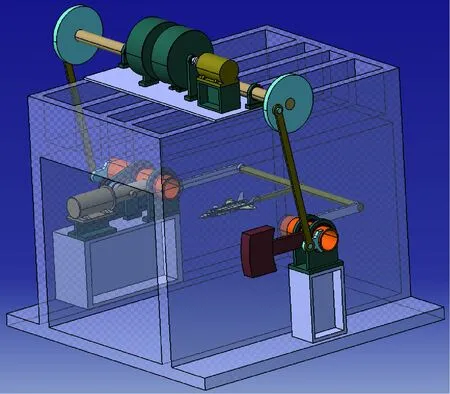
图1 试验装置结构原理示意图Fig.1 Structure shematic of test device
1.4 俯仰/滚转同步控制技术
为了实现俯仰振动与强迫滚转同步控制,从而准确获取其同相位的动态气动力特性,需要解决异步电机和伺服电机两种类型电机的同步控制技术。采用主从轴按各自设定的参数进行正弦曲线运动,先启动俯仰快速拉起或俯仰振动机构,待运行稳定后,再启动强迫滚转机构,通过联动同步控制仿真算法实现与快速拉起或俯仰振动机构的频率相位同步控制。主要借助MATLAB,设计了基于运动规划的任意时刻启动、任意相位同步的强迫滚转相位同步算法,实现了滚转规划曲线与指令正弦曲线的平滑衔接与过渡,保证了相位同步的精度及稳定性。
1.5 数据测量与处理方法
风洞动态试验使用专门研制的动态失速测控系统,以完成试验模型的振动控制、采样控制和各种试验数据的测量、检测和数据处理分析。为了保证天平模拟信号和编码器数字信号的同步性,模拟采集设备和数字采集设备共享同一个采样时钟并同时触发启动,使模拟和数字信号对应采样点的时刻误差小于0.1 μs。
由于大迎角时气流分离、流场脉动、模型运动振动等因素,动态大振幅试验的数据离散性较大,除了数据采集时采用低通滤波器外,还专门设计了采用Kaiser滤波器设计技术的FIR(Finite Impulse Response)数字滤波软件,以抑制数据背景噪声。该类型滤波器在不同的频率上具有相同的群延迟,易于进行滤波延迟校正。
在计算时使用“有风”-“无风”方式扣除系统惯性和阻尼影响,并扣除模型自重、天平校准中心与力矩参考中心不重合等影响,求得各瞬时的气动系数,同时,为了抑制单一周期内随机误差导致的数据分散,试验中采样若干周期(采样时间约为20 s)的气动系数进行总体平均,得出最终结果。该方法经过长期深入研究,已经成功应用于多项动态试验的数据处理,提供了合理可靠、重复性精度较高的试验数据[29-31, 34-35]。
2 研究结果
2.1 单自由度动态试验结果
2.1.1 自由滚转试验
图2给出了研究模型自由滚转试验结果时间历程曲线(图中绿色代表模型迎角阶梯,红色代表滚转运动结果)。图中显示,在试验条件下,模型在迎角α=25°范围内保持滚转水平的基本稳定状态,当迎角达到30°时出现了滚转角γ约为18°~20°的侧偏现象,并在迎角35°时既有侧偏现象发生,又有振幅约为10°的极限环摇滚运动,但模型迎角40°时又回到了基本的滚转水平稳定状态。研究结果不仅与文献[23]鸭式布局结果基本一致,而且与常规测力结果体现的横向静不稳定迎角范围一致。
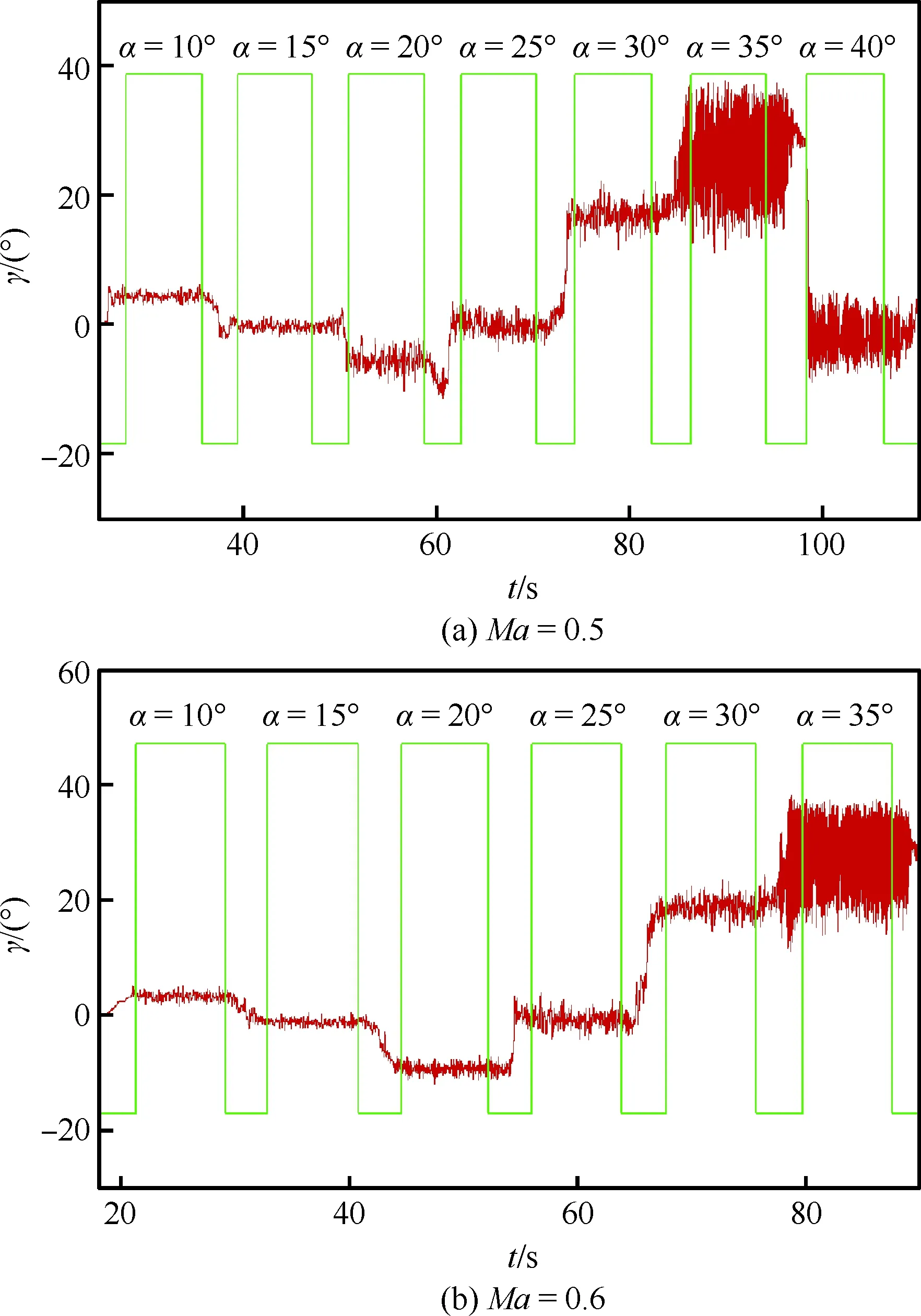
图2 不同迎角时自由滚转角时间历程Fig.2 Time history of rolling angle at different angles of attack
2.1.2 动态气动力特性
动态气动力主要体现飞行器机动过程中绕流的非定常时间尺度效应,对飞行器操纵控制设计的建模仿真分析十分必要。本文在采用70°三角翼模型充分验证试验系统可靠性的基础上,开展了研究模型的动态气动力特性试验研究,试验时,模型的俯仰振动运动规律为
α=αm+αA·sin(2πft)
(1)
式中:αm为模型振动的平均迎角;αA为模型的俯仰振动幅值;f为模型振动频率。
图3给出了Ma=0.40、αA=αm=30°试验条件下,模型的单自由度动态气动力试验结果曲线(曲线中DOF代表模型的自由度,1DOF代表俯仰单自由度,后续曲线的2DOF代表俯仰和滚转两自由度,fp为模型俯仰振动频率)。从图中曲线可以看出,快速拉起和俯仰振动试验结果包络了静态测力结果,呈现出典型的非定常增升现象,符合动态试验气动特性变化规律,也表明了试验结果的可靠性,同时,当模型迎角大约为0°~30°时,随着模型迎角的增加,其法向力系数曲线近似线性变化(图中曲线在迟滞环明显的区域,法向力系数CN较大的部分所在的半条曲线对应着迎角增加阶段,反之,另半条曲线则对应着迎角减小阶段),迎角从30°增加到50°时,法向力系数CN增加的斜率逐渐减小,出现了非线性变化,并且在大约50°迎角时出现了失速(简称失速迎角为50°),然后随着模型迎角从50°增加到60°时,CN呈现迅速减小的趋势,意味着模型的法向力效率随迎角增加反而降低,揭示出典型的失速现象。当模型由最大迎角下行时,其绕流形态则以上行的流动形态依次逆顺序再现,且由于非定常的尺度效应影响,前体的流动分离、非对称和涡及其涡破裂的位置与高度范围都与上行存在差异,而流动再附的迎角则由于迟滞影响会减小,所以,在模型迎角下行过程中,相同迎角时的法向力系数明显小于上行状态的试验结果,并随着振动频率的增加迟滞环越大,体现出典型的动态气动力迟滞现象和非定常尺度效应[29]。
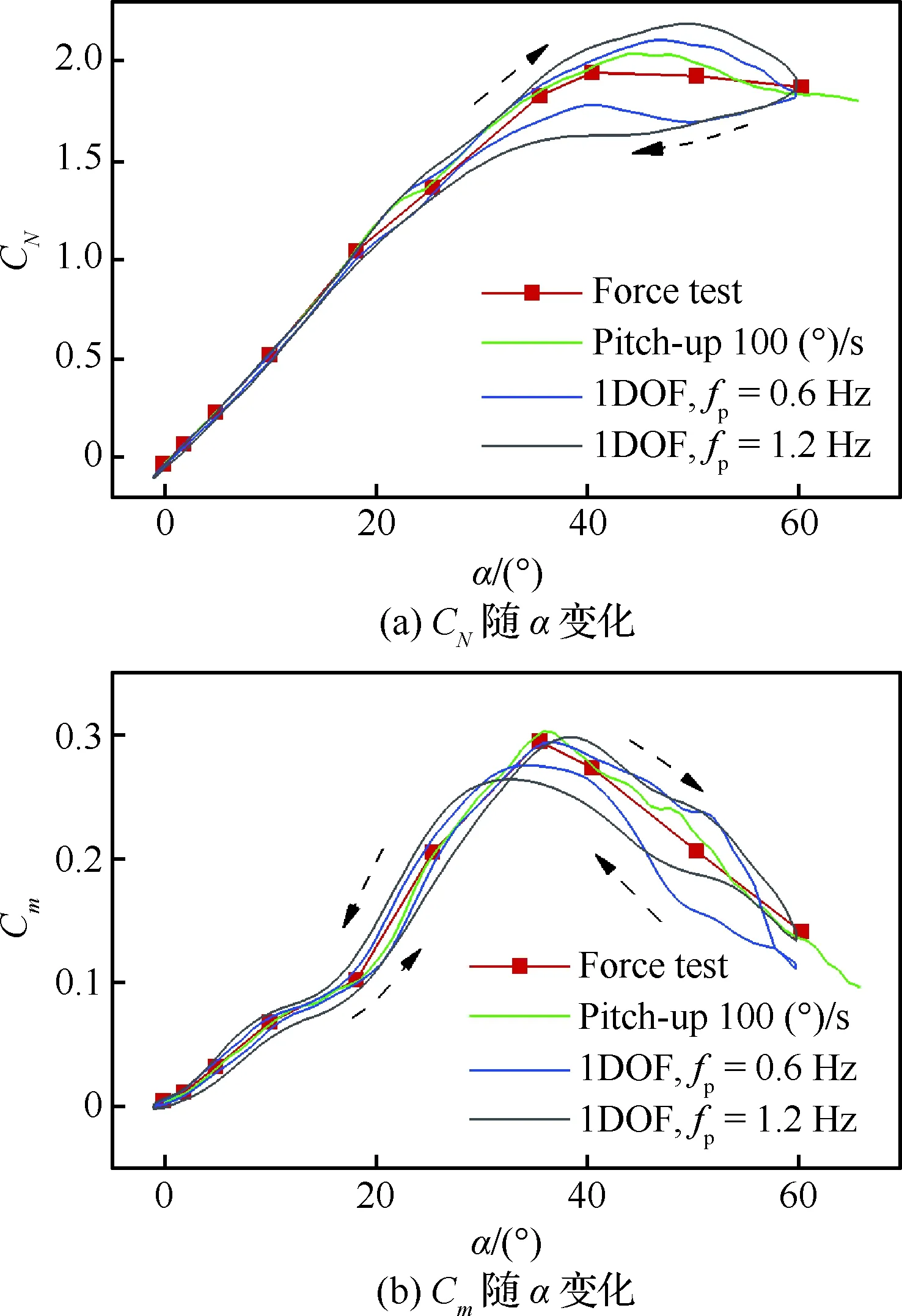
图3 单自由度动态气动力试验结果(Ma=0.40)Fig.3 Results of dynamic test on one degree-of-freedom aerodynamics (Ma=0.40)
从俯仰力矩系数Cm随迎角α变化曲线可以看出(由于Cm曲线存在多个迟滞环现象,图中采用箭头符号标示了曲线的变化走向。以下各类曲线均采用箭头符号标示了其随迎角的变化走向),研究模型俯仰力矩系数与SDM标模和Su-27飞机模型变化趋势类似,在小迎角范围都存在迟滞环现象[30],但典型的四代机模型存在两个明显的迟滞环形态,并且在迎角约为0°~38°时,模型具有俯仰静不稳定性(简称为放宽静稳定设计),这有利于飞行器实现快速的过失速机动控制,可以节省舵面的操纵控制力矩输出。在迎角为38°~60°时,随着模型迎角的增加,俯仰力矩系数呈现为俯仰静稳定状态。同时,从图中还可以看出,模型迎角约为32°~34°时是两个迟滞环的交叉点,在交叉点的小迎角范围,Cm值较小的部分所在的半条曲线对应着迎角增加阶段,反之,另半条曲线则对应着迎角减小阶段,而在大迎角范围,则Cm值对应的迎角变化正好相反。
2.2 双自由度动态试验结果
2.2.1 俯仰振动/自由滚转试验
图4给出了研究模型俯仰振动/自由滚转两自由度耦合试验结果时间历程曲线。从时间历程和局部放大的曲线图可以看出,在试验条件下,模型每个俯仰振动周期内都存在与单自由度自由滚转运动较为一致的滚转振幅,但基本保持滚转水平的稳定状态,与前面的单自由度自由滚转试验结果既存在侧偏,又存在极限环摇滚现象不同,表明俯仰振动运动有利于抑制飞行器模型侧偏运动现象的发生,主要是激发侧偏的滚转运动需要一定的能量积累过程,而在快速的俯仰振动过程中,模型的非对称流动在翼面上所激发的滚转力矩还来不及驱动其进行侧偏的滚转运动所致。
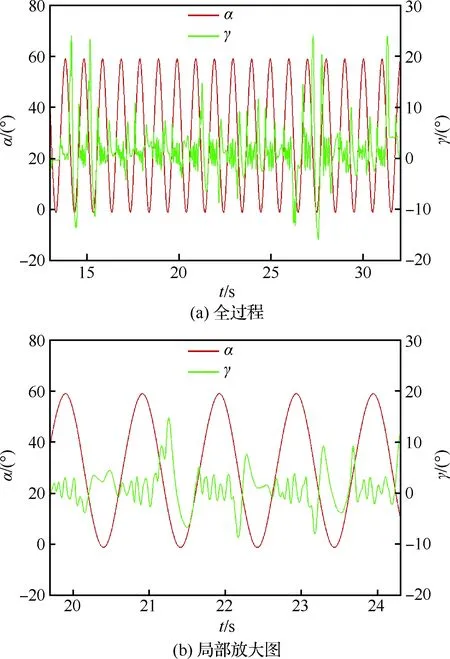
图4 俯仰振动/自由滚转试验结果(Ma=0.40)Fig.4 Results of pitch-oscillation / free-roll test (Ma=0.40)
2.2.2 俯仰振动/强迫滚转试验
双自由度动态试验时,模型的俯仰角和滚转角运动规律分别为
(2)
将模型的俯仰角和滚转角转换到模型的实际迎角与侧滑角为
(3)
式中:αM为模型俯仰振动角;γM为模型滚转角;γm为模型中心滚转角;γA为模型滚转振动幅值;β为模型侧滑角。
图5给出了Ma=0.40、αA=αm=30°、γm=0°、γM=45°试验条件下,模型俯仰振动/强迫滚转两自由度相同振动频率与俯仰单自由度振动的动态气动力试验结果对比曲线,图中R-Exp代表重复性试验(Repeated Experiment),fr为模型滚转振动频率。从图中曲线可以看出,在俯仰/滚转两自由度情况下,重复性试验结果吻合较好,也进一步表明了高速风洞动态试验系统测量结果的可靠性及其较高的重复性精度水平[30]。同时模型的法向力系数CN曲线随振动角的变化与单自由度结果基本类似(图中曲线在迟滞环明显的区域,CN值较大的部分所在的半条曲线对应着迎角增加阶段,反之,另半条曲线则对应着迎角减小阶段),但由于模型存在俯仰与滚转耦合运动,所以模型在同样的振动支撑机构角度下,其实际运行过程中两自由度的模型迎角要小于单自由度运动的模型迎角(见图5(f)),从而使得模型的法向力系数要小于单自由度试验结果,在迎角0°和60°时,模型处于滚转零位状态,没有滚转效应的影响,两自由度的法向力系数等于单自由度试验结果。
试验结果曲线显示,在俯仰/滚转两自由度试验条件下,模型的俯仰力矩系数Cm与单自由度结果相比,其气动迟滞特性出现明显的差异,从单自由度的一个8字环变成了两个8字环的迟滞特性,但这两个8字环的中心交叉点角度与单自由度迟滞环的交叉点基本一致(基本上在支撑机构的34°左右)。
从横航向气动力(滚转力矩系数Cl、侧向力系数Cy、偏航力矩系数Cn)随αM变化曲线来看,单自由度试验条件下,模型在迎角超过40°以后才出现不同程度的横向气动力增量,且量值相对较小,但两自由度耦合运动条件下,模型存在明显的侧滑角变化历程(见图5(f)),从而出现较大的横向气动力迟滞环现象。
图6给出了模型在Ma=0.40、αm=30°、αA=15°、γm=0°、γM=45°试验条件下俯仰振动/强迫滚转两自由度不同振动频率与相同振动频率的动态气动力试验结果对比曲线。从图中曲线可以看出,在滚转振动频率是俯仰振动频率两倍的情况下,模型的法向力系数CN和俯仰力矩系数Cm随迎角的迟滞环也增加了一倍,体现出更加复杂的气动迟滞特性,容易引发耦合失稳发散。
由于滚转振动是俯仰振动的两倍频率,从而引起模型在一个俯仰振动周期内出现两个周期的侧向振动(见图6(f)),所以模型的滚转力矩系数Cl、侧向力系数Cy随αM变化由相同振动频率的单个迟滞环变成了两个或多个迟滞环结构形态,而偏航力矩系数Cn随αM变化由一组迟滞环基本上变成了两组迟滞环特性。
综上所述,在俯仰/滚转两自由度条件下模型的动态气动特性十分复杂,呈现出强烈的气动/运动耦合现象,为飞行器的性能分析、建模仿真设计以及飞行控制提出了新的技术挑战,需要在充分获得静态气动力数据的基础上,深入开展其动态气动力特性研究,才能更加有效发挥飞行器的技术和战术性能。
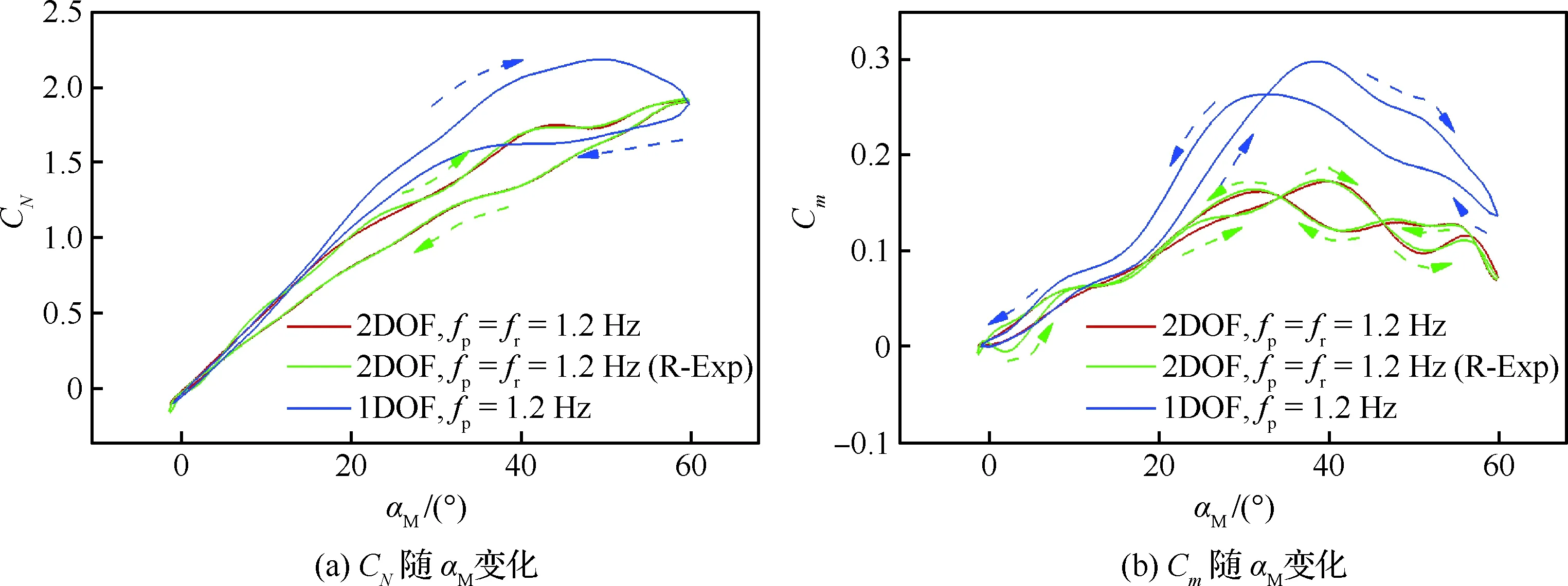
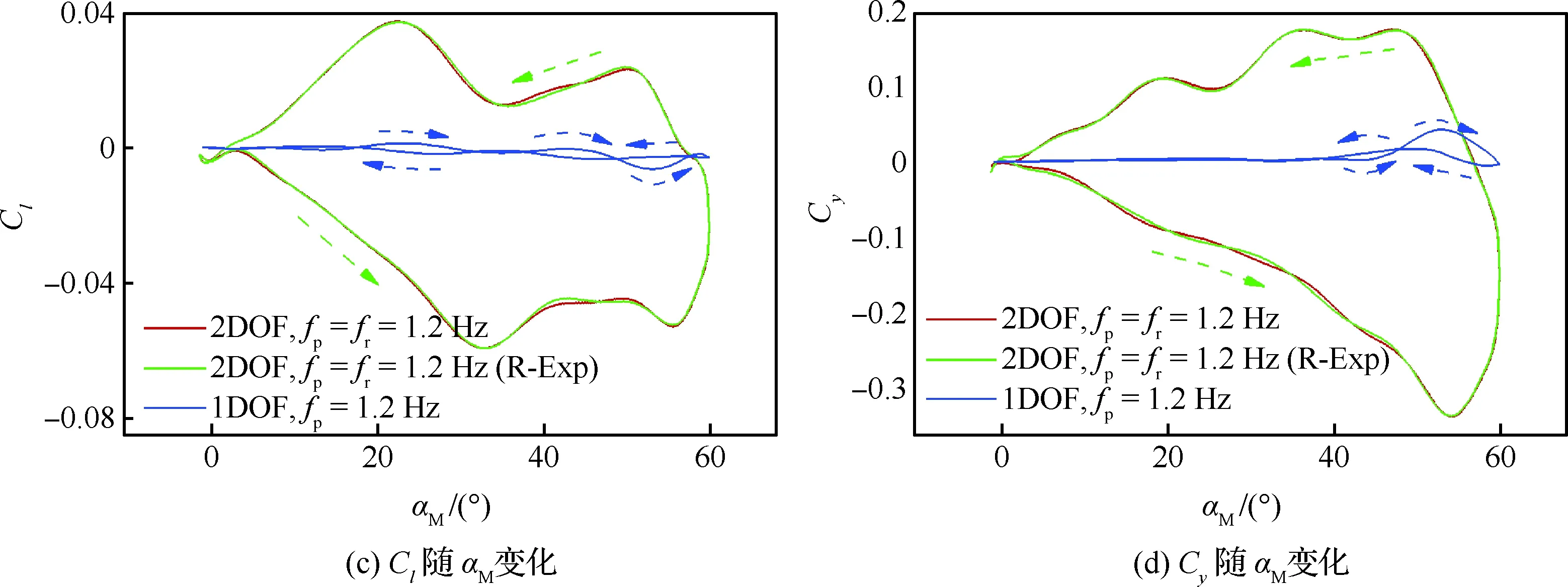
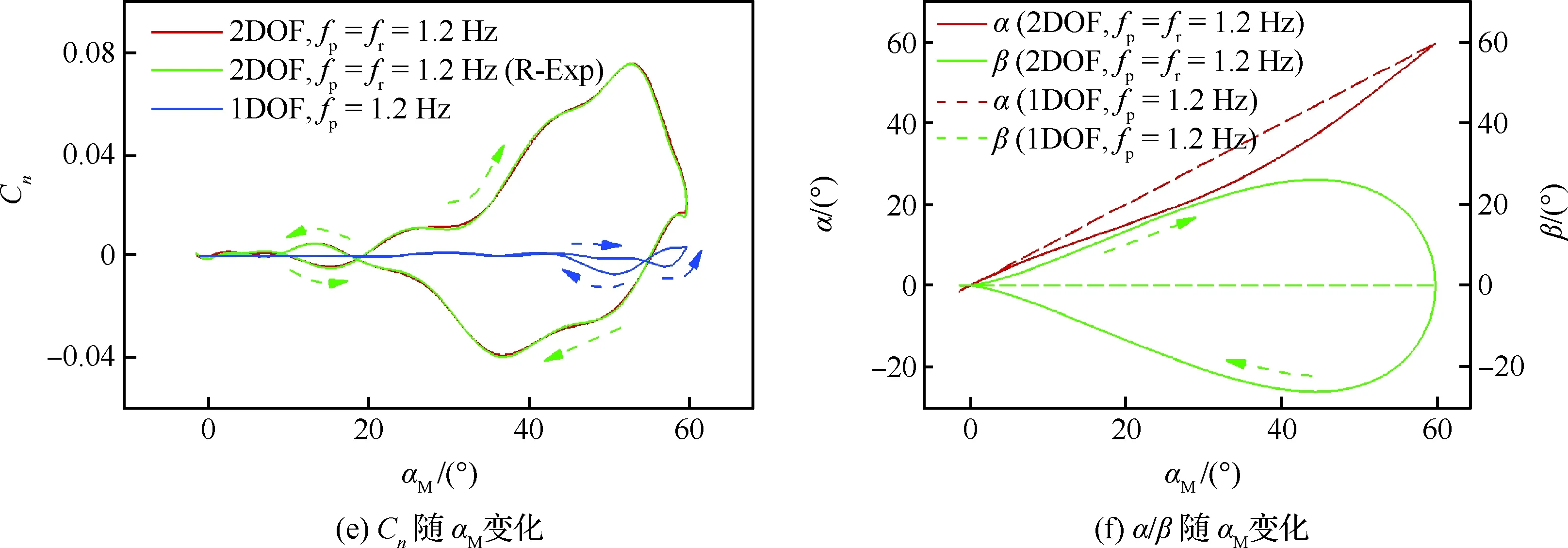
图5 俯仰/滚转相同振动频率试验结果(Ma=0.40)Fig.5 Test results of pitch/roll at the same oscillation frequency (Ma=0.40)
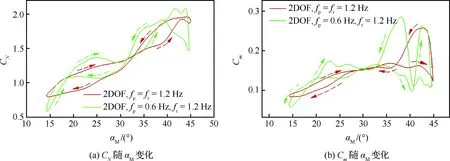
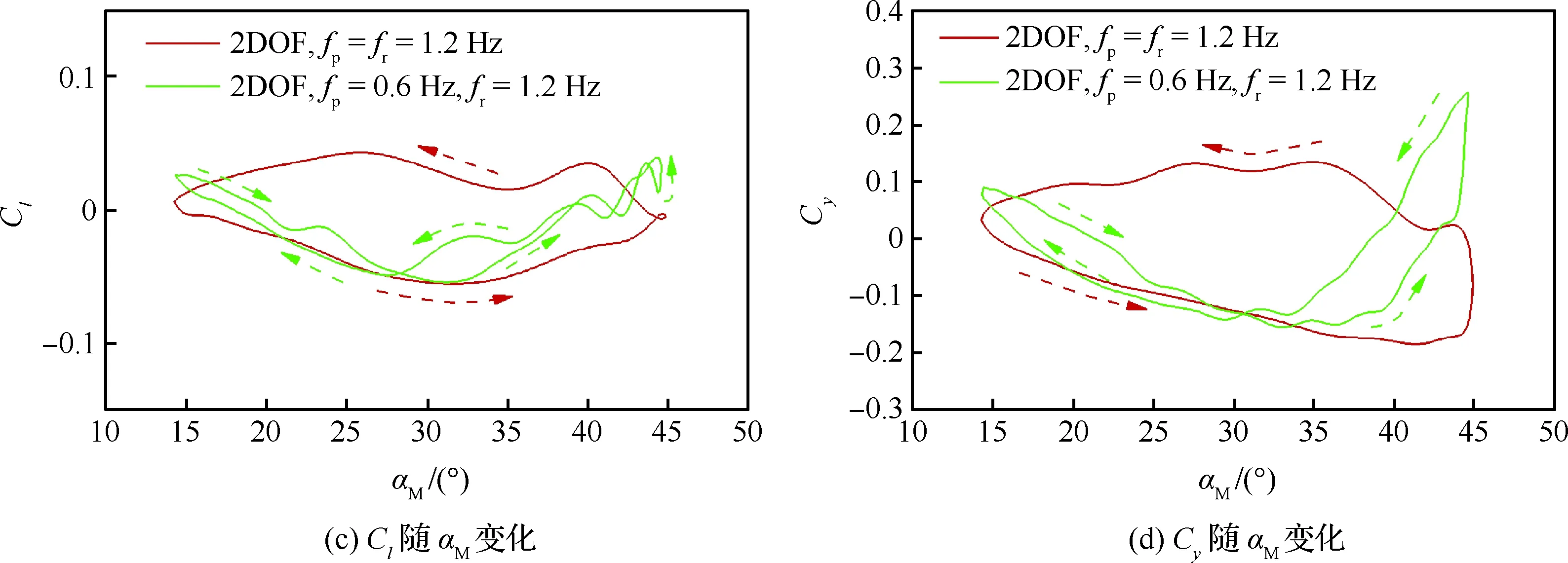
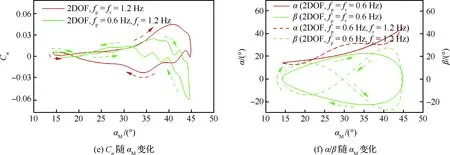
图6 俯仰/滚转不同振动频率试验结果(Ma=0.40)Fig.6 Test results of pitch/roll at different oscillation frequency (Ma=0.40)
3 结 论
针对高机动飞行器的单自由度与俯仰/滚转两自由度耦合的动态气动特性问题,选用典型类四代机模型,通过风洞的静态摇滚试验、单自由度动态试验、俯仰振动/自由滚转和俯仰振动/强迫滚转试验研究,对比分析了相关研究结果。
1) 研究模型在固定迎角30°左右会出现滚转单自由度的侧偏,并在迎角35°时既有侧偏现象发生,又有振幅约为10°的极限环摇滚运动,在迎角40°时又回到了基本的滚转水平稳定状态。
2) 强迫俯仰/自由滚转两自由度耦合运动情况下,模型的侧偏运动幅值得到了一定的抑制,表明俯仰机动有利于延缓非定常流动。
3) 俯仰单自由度振动条件下,模型法向力和俯仰力矩会出现明显的气动迟滞特性,在强迫俯仰/强迫滚转两自由度耦合运动情况下,纵横向气动力都出现了气动迟滞现象,甚至是多个气动迟滞环结构,容易引发耦合失稳发散现象。