基于CAN总线的模块化UPS并联控制策略
2019-01-09苏宁焕
苏宁焕
(厦门科华恒盛股份有限公司,福建 厦门 361006)
0 引 言
UPS是改善用户侧电能质量的重要设备[1], 随着用户侧电能质量要求逐渐升高, UPS的应用也越来越多.实际中, 由于单个UPS容量往往不能满足需求, 经常需要多个UPS并联.多个UPS并联会导致变换器之间的循环电流[2-3], 循环电流在空载或轻载条件下特别危险, 因为一个或几个模块可以吸收整流模式下的有功功率,这个电流会增加直流母线电压, 这可能会导致直流母线电容器损坏或由于过载而导致停机[4-6].
针对UPS并联,目前许多学者已经开展了相关工作[7-9],已见的UPS并联控制方法大致可分为三大类,即下垂控制[10-12]、有功无功功率控制[13-15]和瞬时平均电流控制[16-17].文献[10]针对传统下垂控制方法在并网情况下易受电网影响的实际情况,引入前馈控制消除电网电压和频率波动对UPS并联控制的影响;文献[11]将虚拟阻抗引入下垂控制当中,并对传统虚拟阻抗方法提出色适应修正,提升了系统的均流特性和稳定性;文献[12]引入动态虚拟阻抗,该虚拟阻抗随负载电压和电流的变化而变化,改善了系统控制精度.文献[15]将平均功率控制和下垂控制相结合,并引入谐波含量作为下垂控制的关键变量,克服了电压、电流的测量敏感性.
在UPS并联控制策略中,数据传输的同步、可靠是控制的前提,常用的模拟信号传输方式易受干扰,且可能由于器件参数差异导致同步性较差,为了克服这一问题,同时尽量兼顾已有方法的特点,本文给出一种基于CAN总线的模块化UPS并联控制策略,应用虚拟多回路输出阻抗下垂控制,并采用CAN总线通信实现各并联UPS模块间的同步和均流控制.该方法在并联连接UPS逆变器的情况下,能感应并平均提供给交流总线上的有功和无功功率,得到相应的信号,在通信中采用CAN总线通信,大大提高了系统控制的速度和可靠性.
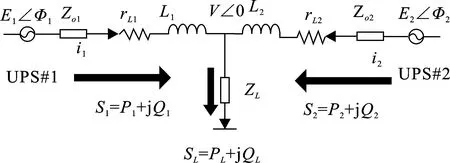
图 1 2个UPS并联等效电路Fig 1.Equivalent circuits of two UPS parallel
1 整体控制方案
文中给出的并联控制方案,由1个集中控制器和N个UPS模块组成,见图1.集中控制器采集负载电流I0,并根据当前模块数N,计算得到当前模块平均电流iave,通过CAN总线将iave、电压与电流的相位角θ、参考电压Uref发送给各个功率模块;各个功率模块将获取的Uref作为电压指令值,θ作为相位指令,进行电压电流双闭环控制,并将iave与本模块的I0进行闭环调节,作为平均电流的调节量,所有系统通过CAN总线进行通信.
1.1 并联均流原理
图1为并联的2个UPS的等效电路.假设L1≫zO1+zL1l2≫zO2+ZL2,并且总输出阻抗XT(L1+L2)主要呈感性的.因此有功和无功循环视在功率为
(1)
分别将式(1)表示为电流的函数:
(2)
综上所述,假设输出为感应阻抗,通过调节输出电压的相位和幅度,可以控制有功和无功功率或电流.

图 2 传统的功率分配下垂方法的框图Fig.2 Block diagram of traditional power distribution droop method
1.2 传统的功率分配下垂控制
图2为传统的功率分配下垂方法的框图.其中ω*和E*是空载时的输出电压频率和幅度,m和n是下垂频率和幅度系数.P和Q是有功功率和无功功率,表示为
(3)
(4)
1.3 多回路虚拟输出阻抗下垂控制
使用传统的功率分配下垂控制时,如果增加了下垂系数,那么以降低电压调节为代价可以实现良好的功率分配;如果频率和振幅偏差在2%~5%为可以接受的范围.实际上,m和n是由式(5)和(6)所决定的,即
(5)
(6)
式中:δω和δe是允许的最大频率和电压偏差;Pmax和Qmax是UPS提供的P和Q值的额定值.这样,稳态下的P和Q分配误差由频率εω和电压εΕ的误差决定,即
(7)
式中:εP和εQ是稳态有功和无功功率的差值;εω和εΕ是变频器的频率和幅值的差值.可以看出,εΡ和εQ可以通过增加m和n来减小,但是由式(7)限制.图3给出了m系数情况下的权衡.

图3 权衡 P-ω下垂系数Fig.3 Tradeoff for designingP-ω droop coefficient
由图3可知,功率分配误差取决于频率误差,而不是固有的频率偏差.当不同额定值的单元并联时,下垂系数值必须根据以下关系进行调整:
(8)
式中:SN是UPS的视在功率.
通常情况下,逆变输出阻抗被认为是感性的,这是由高电感元件的阻抗和输出滤波器的大电感所引起的.然而,并非所有情况下都这样,因为闭环输出阻抗也取决于控制策略,并且线路阻抗主要是低电压的电阻.闭环逆变器的输出阻抗影响功率分配精度,并确定下垂控制策略.因此,式(8)可通过考虑每个逆变器Z∠θ的总体输出阻抗来重新计算.每个单元注入到总线上的有功和无功功率可以表示为
(9)
式中:E和V是逆变器输出电压和公共总线电压的幅值;Φ是功率角;Z和θ1分别是输出阻抗的大小和相位.注意:P-Φ和Q-E之间没有去耦.
因此,可以重写一般形式的下垂控制方法:
(10)
因为线路阻抗对P/Q下垂方法的功率分配精度有相当大的影响,因此可以用虚拟输出阻抗来修正逆变器的输出阻抗.该阻抗应大于UPS逆变器的输出阻抗加上最大电源线阻抗的总和值.虚拟输出阻抗的实现应为
(11)

图4分别为电感输出阻抗和电阻输出阻抗的下垂控制.可以看出,控制器增益m和n由含P和Q的额定值和最大允许偏差εω频率和振幅εE的函数决定.

(a) 电感输出阻抗 (b) 电阻输出阻抗图 4 电感和电阻输出阻抗的下垂控制Fig.4 Droop control functions for inductive output impedance and resistive output impedance
图5为带有虚拟输出阻抗路径的闭环系统的框图,输出阻抗值必须按照与m和n系数相似的方式来选择,根据每个UPS单元N的额定表观功率SN,即
Zo1S1=Zo2S2=…=ZoNSN.
(12)
2 实验验证
构建了如图6所示120 kW的实验平台(3个40 kW/UPS模块并联)验证所提多逆变器并联运行的控制策略的有效性.

图 5 带有虚拟输出阻抗路径闭环系统的框图 图 6 原理样机结构图Fig.5 Block diagram of the closed-loop system with the virtual prototype Fig.6 Schematic diagram of theoutput impedance path
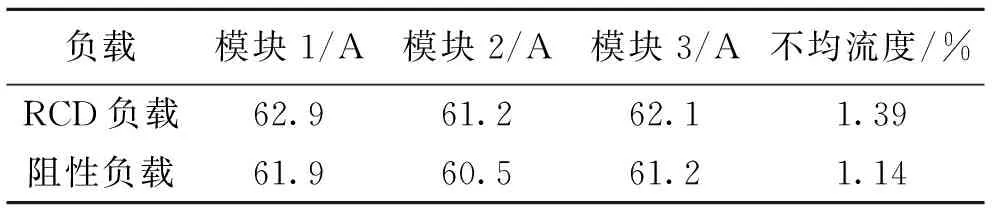
负载模块1/A模块2/A模块3/A不均流度/%RCD负载62.961.262.11.39 阻性负载61.960.561.21.14
实验平台由集中控制器、3个UPS模块、1个旁路模块及机架、配电组成;电流、电压直接通过Agilent 示波器 MSO-X3014A 测量.
图7和图8分别为RCD负载均流波形以及线性负载均流波形.其中,CH1通道为输出电压,CH2~CH4为模块1~3的输出电流波形.由图7和图8可知,在RCD负载及线性负载下,模块均具有良好的均流特性.但是在线性负载的情况下均流效果更好.比较负载分别为RCD和阻性负载2种不同情况下测试所提策略的均流效果如表1所示.由表1可以看出,负载为阻性时的电流不均流度小于负载为RCD时的电流不均流度.

图 7 RCD负载下各模块输出电压与电流波形波形 图 8 线性负载下下各模块输出电压与电流波形 Fig.8 Output voltage and current waveform of each module under RCD load Fig.8 Output voltage and current waveform of each module under linear load
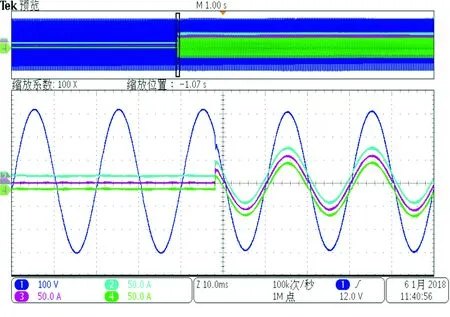
图 9 突加负载输出电压电流波形Fig.9 Sudden load output voltage and current waveform
图9为在10 s时突加负载的动态波形图,其中,CH1通道为输出电压,CH2~CH4为模块1~3的输出电流波形,该波形表明,该控制策略具有良好的动态特性(动态指标<3.5%),突加负载瞬间并联模块维持均流状态.
3 结束语
基于UPS模块化并联系统存在的均流与环流抑制问题,给出一种基于CAN总线的模块化UPS并联控制策略,通过应用虚拟多回路输出阻抗下垂控制,并采用CAN总线通信实现各并联UPS模块间的同步和均流控制.结果表明,所提方法在满足系统均流与环流抑制的情况下,能够对模块化UPS并联系统进行稳定的信号控制,提高了系统的可靠性.
