按转子磁链定向的异步电机转差型矢量控制系统仿真研究
2018-12-28张燕燕张宝栋王爱华高楠楠刘朝阳杨巍巍
张燕燕 ,张宝栋 ,王爱华 ,高楠楠 ,刘朝阳 ,李 培,杨巍巍
(1.国网技术学院 山东,济南 250002;2.国网济南供电公司,山东 济南 250012;3.山东电力工程咨询院有限公司,山东 济南 250013)
0 引言
交流调速技术随着电力电子技术的发展得到了迅速发展。二十世纪七十年代初,德国学者F·Blaschke提出了交流电机磁场定向控制原理,该原理以异步电机在转子磁场定向坐标系下的数学模型为基础,使交流异步电机的控制技术发生转变,即从标量控制转向矢量控制[1]。通过矢量控制技术,交流异步电机的控制可以像直流电动机一样,其内部耦合在基于转子磁链定向的m、t旋转坐标系下得到了完全解耦[2-3]。
在异步电机转子磁链定向控制中,磁链观测的准确与否直接关系到整个控制系统的动、静态性能。由于直接按转子磁场定向的矢量控制系统比较复杂,磁链反馈信号不易准确获取,借鉴矢量控制思想,应用稳态转差频率得到转子磁场位置,形成了转差频率矢量控制方法[4-5]。
对于交流电机矢量控制系统的研究,主要利用计算机仿真技术。MATLAB提供的SIMULINK动态仿真工具对系统进行建模非常简单,而且仿真具有直观、实时性等特点[6-7],故本文基于该工具进行了交流电机矢量控制系统的仿真研究。
1 异步电机的数学模型
三相交流异步电机的数学模型是高阶、非线性、强耦合的多变量系统,为了使其得到线性、解耦控制,采用矢量坐标变换,产生同样的旋转磁动势为基准,先将三相静止坐标系变换到两相静止坐标系α、β,然后再变换到两相旋转坐标系d、q,该旋转坐标系可以定向在定子磁场、转子磁场或者间隙磁场方向,但是只有定向在转子磁场方向才能得到完全解耦。即d轴定向在转子总磁链的方向,称为m轴,q轴定向在逆时针超前m轴90°的方向,称为t轴。通过把d、q坐标系放在同步旋转的磁场上,静止坐标系中的交流量转化为旋转坐标系中的直流量[3]。
异步电机坐标变换结构图,如图1所示。
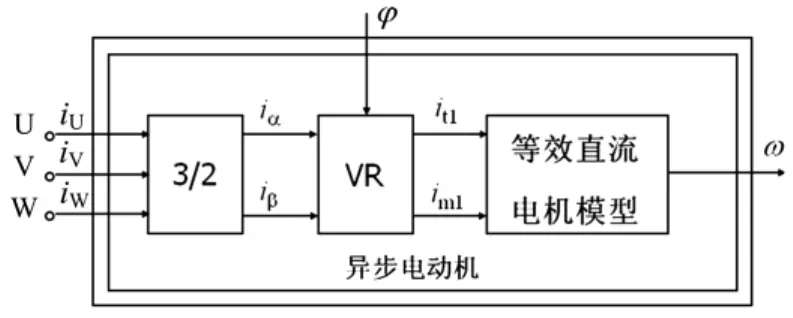
图1 异步电机坐标变换结构图
本文首先分析异步电机在两相同步旋转坐标系d、q上的数学模型。
1.1 电压方程
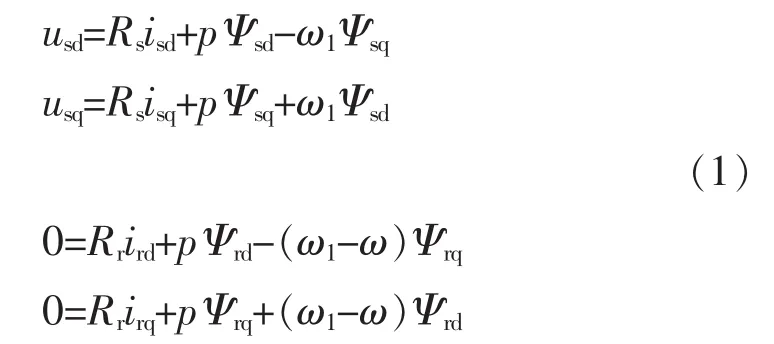
上式中,Rs为定子绕组电阻;Rr为转子绕组电阻;ω1为同步角速度;ω为转子旋转角速度;p为微分算子
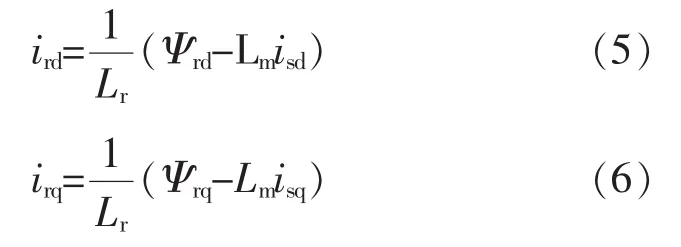
1.2 磁链方程

式中,Lr为转子绕组电感;Lm为定转子间互感。
1.3 电磁转矩方程

由公式(2)、(3)可得
把式(5)、(6)带入电磁转矩方程式(4)中可得

1.4 运动方程
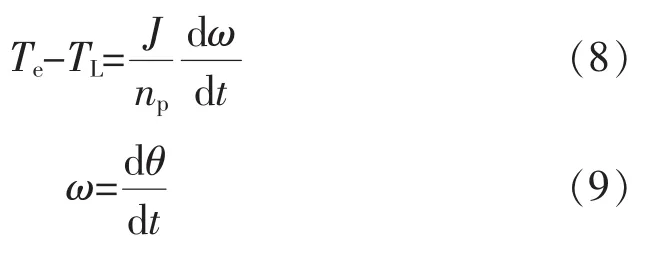
其中,TL为负载转矩;np为电机极对数;J为转动惯量。
1.5 mt坐标系下矢量控制方程
当两相同步旋转坐标系d、q按转子磁链定向时,只存在m轴的总磁链,t轴磁链为零。即:

在上式和后式中,为便于分析,用脚标m、t代替d、q,由式(1)、式(4)、式(7)、式(8)和式(10),可得到以下状态方程:

其中:Tr为转子电磁时间常数为电机漏磁系数
由式(13)可得

或

由式(14)可得转差公式如下

式(11)、式(17)或式(18)和式(19)构成矢量控制基本方程。从以上可以看出,虽然它们比三相静止坐标系上的模型简单并且阶数低,但是该数学模型的非线性、多变量、强耦合的性质并没有改变。
为解决上述不足,本文采用下述方法:把由矢量控制方程计算出的转差频率给定信号ω*与实测转速信号ω相加,得到定子频率信号,即得旋转磁场同步旋转频率:

将ω1积分可以得到同步旋转坐标相位角φ,即转子磁链的定向角,再加上定子电流相角θ*s,来控制逆变器换向。
2 基于MATLAB/SIMULINK矢量控制系统的仿真模型
2.1 异步电机矢量控制系统建模
由以上推导的按转子磁链定向的矢量控制系统基本方程式,利用MATLAB软件电气系统模块库中的元件,搭建交流异步电机转差型矢量控制系统,所建仿真框图如图2所示。
本控制系统仿真框图主要包括:速度ω*、转矩、电流和磁链Ψ*的给定环节,速度、电流调节器 ASR 和 ACR,坐标变换(3s/2r和 2r/3s)模块,磁场定向模块,IGBT逆变器模块,异步电机模块,测量和显示模块,其中ωm为转子机械角速度,θ为转子磁链转角,TL为负载转矩。在图2中,为了得到更好的仿真效果,检测定子三相电流和转子转速时分别增加了延迟环节,计算磁链幅值和相角过程中积分环节均离散化。
2.2 异步电机转差型矢量控制系统仿真
在该模型仿真测试中,交流异步电机的参数为:电机功率PN=4 kW,线电压U=0.46 V,定子相绕组电阻Rs=0.087 Ω,定子绕组自感Ls=35.5 mH,转子绕组电阻Rr=0.228 Ω,转子绕组自感Lr=35.5 mH,定转子间互感 Lm=34.7 mH,转动惯量 J=1.662 kg·m2,额定转速 120 rad/s,极对数 np=2。
利用MATLAB/SIMULINK的仿真功能,为了验证所设计的交流异步电机矢量控制系统模型的静态和动态性能,本文对静态和动态两方面进行了实验验证,所得结果见下文。
3 仿真结果及分析
3.1 稳态仿真
电机定子侧施加额定线电压0.46 V,额定频率为 60 Hz,空载启动,转速给定为 120 rad/s,所得电机定子三相电流曲线、转速曲线、电磁转矩曲线如下图3-5所示。
由图3-5可见,异步电机空载启动时,转速很快达了到给定值。同时可以看出,空载时定子三相电流和电磁转矩的仿真波形也比较理想。
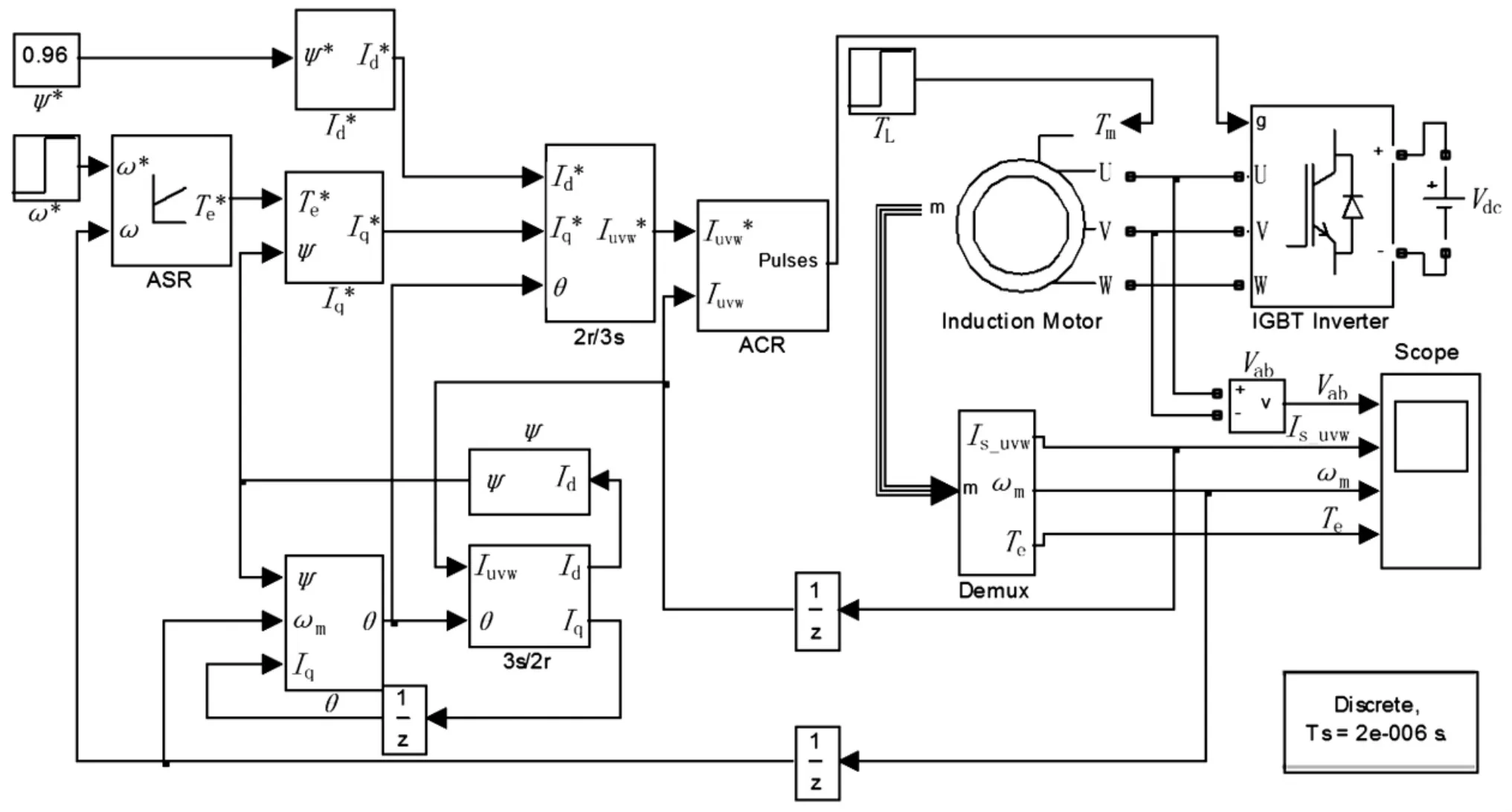
图2 异步电机矢量控制系统仿真框图
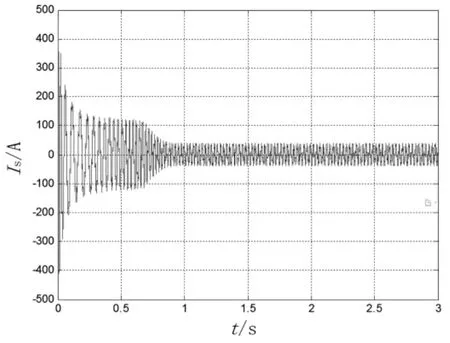
图3 空载时定子三相电流仿真曲线
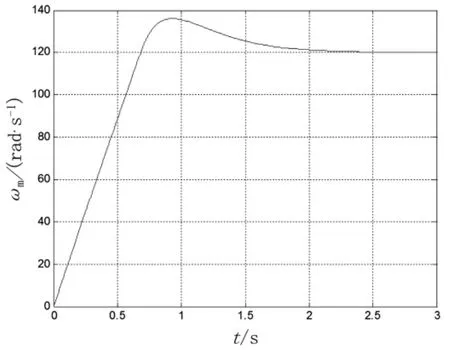
图4 空载时电机转速仿真曲线
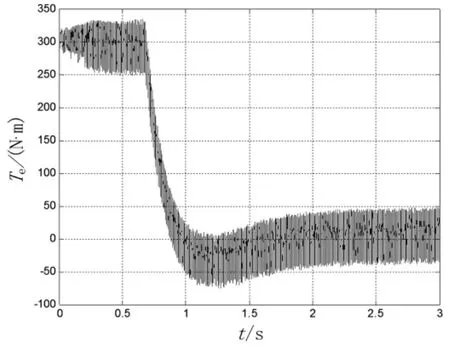
图5 空载时电磁转矩仿真曲线
3.2 暂态仿真
当转速达到稳定转速120 rad/s后,在1.8 s时,电机转速突加为 150 rad/s,待系统稳定后,在时间为2.8 s时突加负载200 N/m,所得电机定子三相电流曲线、转速曲线、电磁转矩曲线如下图6-8所示:
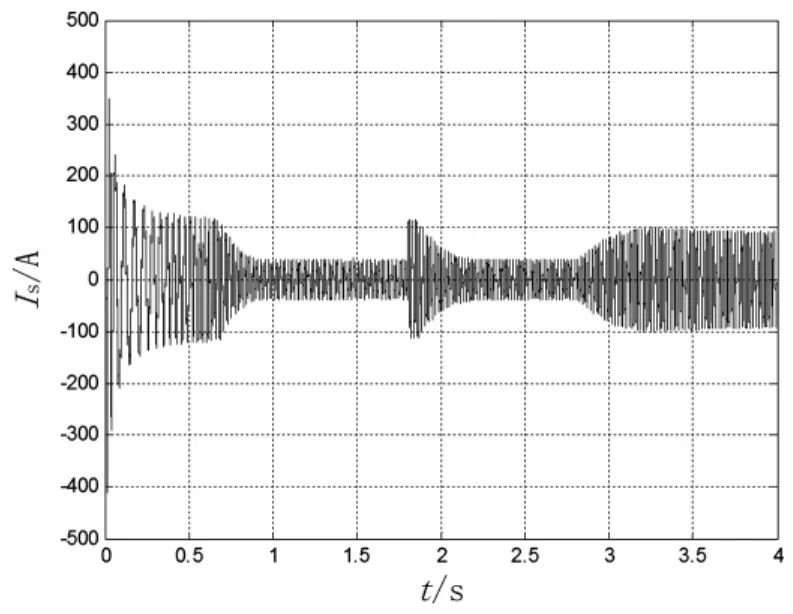
图6 暂态时定子三相电流仿真曲线
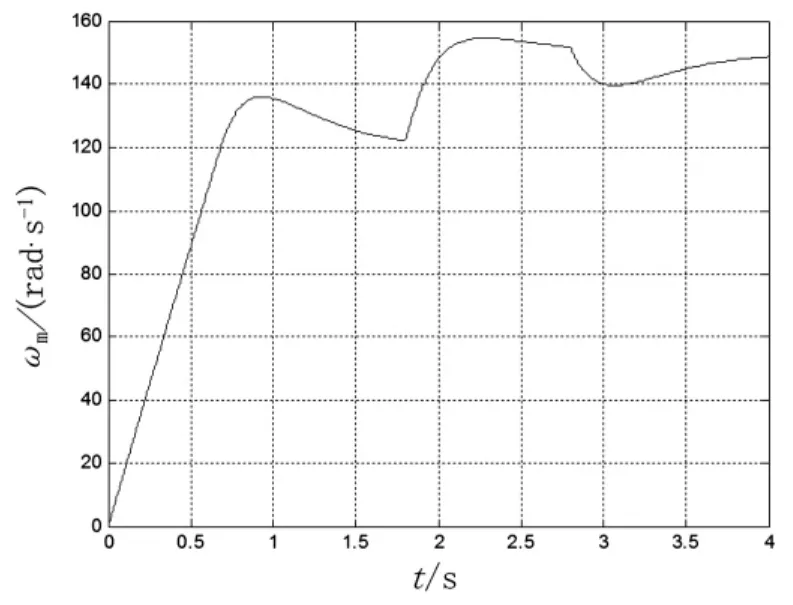
图7 暂态时电机转速仿真曲线

图8 暂态时电磁转矩仿真曲线
由图6-8可见,当系统稳定后,在t=1.8 s时转速由120 rad/s突加到150 rad/s,定子电流和电磁转矩发生跃变,然后又达到稳定状态。在t=2.8 s时,突加负载转矩为200 N/m,电磁转矩立刻增加,电磁转矩数值由零增加为给定负载值,此时电流也相应增加,而电机转速略有减小,但变化不大,而且在经过一段时间后能够恢复到原来的数值,实现了转速无静差。
4 结束语
仿真结果表明,本文构建的按转子磁链定向的异步电机转差型矢量控制系统具有良好的静态和动态性能。利用转差频率的矢量控制方法,实现了转速调节的无静差,而且加、减速平滑稳定。利用MATLAB/SIMULINK中电气系统模块构建动态矢量仿真系统能方便、直观、精确地构建出多种矢量控制系统。
