动态指向式旋转导向钻井工具测控系统设计与性能分析
2018-12-25刘建华佀洁茹耿艳峰王伟亮
刘建华,佀洁茹,耿艳峰,张 卫,王伟亮,王 凯
(1.中国石化石油工程技术研究院,北京 100101;2.中国石油大学(华东)信息与控制工程学院,山东青岛 266580)
旋转导向钻井工具具有摩阻小、钻速快、井眼质量好、易调控、位移延伸能力强等优点[1-2],因此国内外都进行了相关技术研究。目前,国外已经有多种比较成熟的旋转导向钻井系统;国内也在关键技术方面取得了突破,并研制出了一些工具系统,但在工作性能、自动化程度等方面和国外还有一定差距。旋转导向钻井工具根据导向方式可分为推靠式和指向式2类,按照偏置机构的工作方式可分为静态式和动态式2类[3],由此衍生出4种组合方式。其中,动态指向式旋转导向钻井工具无论是造斜率、导向精度,还是位移延伸能力等,均优于其他3种。动态指向式旋转导向钻井工具利用内部的稳定平台为导向偏置机构提供一个对地静止的参考系,在该参考系下调节所需的工具面角,可实现指向式旋转导向钻井功能。因此,工具面角的动态测量精度和稳定平台的控制性能直接决定了导向钻井工具的技术指标。鉴于此,笔者基于自主研发的动态指向式旋转导向钻井工具的原理样机,介绍了该类旋转导向钻井工具的结构与工作原理,设计了测控系统并分析了其关键技术,针对粘滑振动工况进行了稳定平台抗扰动性能测试,总结了规律,以期为开发更高性能的旋转导向钻井工具系统提供参考。
1 样机结构及基本工作原理
自行设计的动态指向式旋转导向钻井工具的原理样机,由钻铤驱动连接轴、钻铤、稳定平台驱动电机、稳定平台、稳定平台电子仓、钻头连接轴、万向节、钻头、双偏心环机构以及轴承等部件组成,如图1所示[4]。其中,稳定平台电子仓内安装有数据处理器、MEMS速率陀螺仪和三轴重力加速度计。
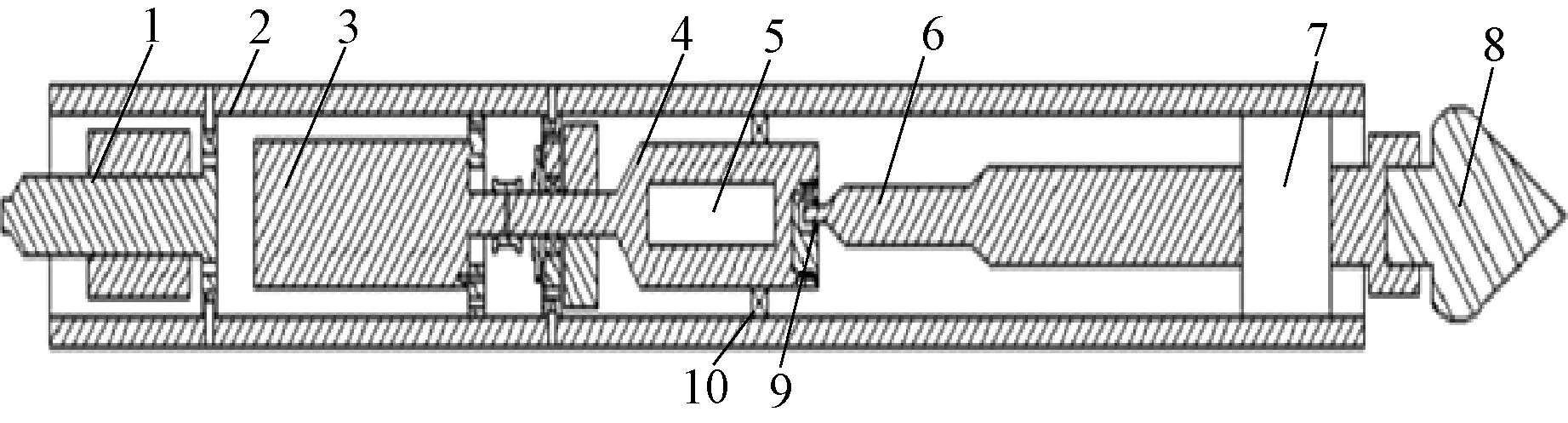
图1 动态指向式旋转导向钻井工具原理样机结构Fig.1 Mechanical structure diagram of the dynamic point-the-bit rotary steerable drilling tool1.钻铤驱动连接轴;2.钻铤;3.稳定平台驱动电机;4.稳定平台;5.稳定平台电子仓;6.钻头连接轴;7.万向节;8.钻头;9.双偏心环机构;10.轴承
该旋转导向钻井工具工作时,外接伺服电机通过钻铤驱动连接轴与钻铤相联,带动钻铤以及通过轴承安装在钻铤内部的稳定平台转动,与此同时,稳定平台驱动电机为稳定平台提供了一个与钻铤转速大小相同、方向相反的转速,保证稳定平台对地静止。稳定平台电子仓内的MEMS速率陀螺仪实时测量稳定平台对地转速,三轴重力加速度计则用于测量稳定平台的角位置。稳定平台通过双偏心环机构与钻头连接轴连接,实现导向功能。万向节为钻头的转动提供支点,同时将来自钻铤的钻压和扭矩传递至钻头。
双偏心环机构是动态指向式旋转导向钻井工具的导向偏置机构,由内、外两个环组成[5],如图2所示(图2中:X为外偏心环中心轴线;Y为钻头轴线;Z为偏心孔轴线;O为X,Y和Z的交点;θs为OX与OY及OY与OZ之间的夹角,(°))。轴线X与钻铤轴线一致,钻头连接轴上端位于内偏心环的中空孔中,其轴线Y与Z成一定夹角,即结构弯角。轴线Z与内偏心环中心轴线一致,称为偏心孔轴线。设计时要求轴线X与轴线Y的夹角为θs,轴线Y与轴线Z的夹角一般也设计为θs,最大结构弯角为2θs。当内外偏心环有相对圆周运动时,Y与X的夹角将在0°和已设计好的最大结构弯角间变化,即完成结构弯角的控制。
外偏心环固定于稳定平台,内偏心环在0°~360°每隔60°设置一个卡槽,采用手动方式进行6级调节。实际工作过程中,结构弯角根据钻井工程需要由人工调节。偏心环设置了6级,结构弯角可在0°~0.5°范围内调整,与6个等级近似呈线性关系。通过控制稳定平台驱动电机的角位置,实现工具面角的自动调节。当工具面角调节至设定要求后,稳定平台与钻铤转速大小相等、方向相反,工具面角保持不变,实现增斜、降斜钻进。结构弯角固定时,稳定平台以不等于钻铤转速的速度匀速旋转,工具面角由0°向360°转动,实现稳斜钻进。
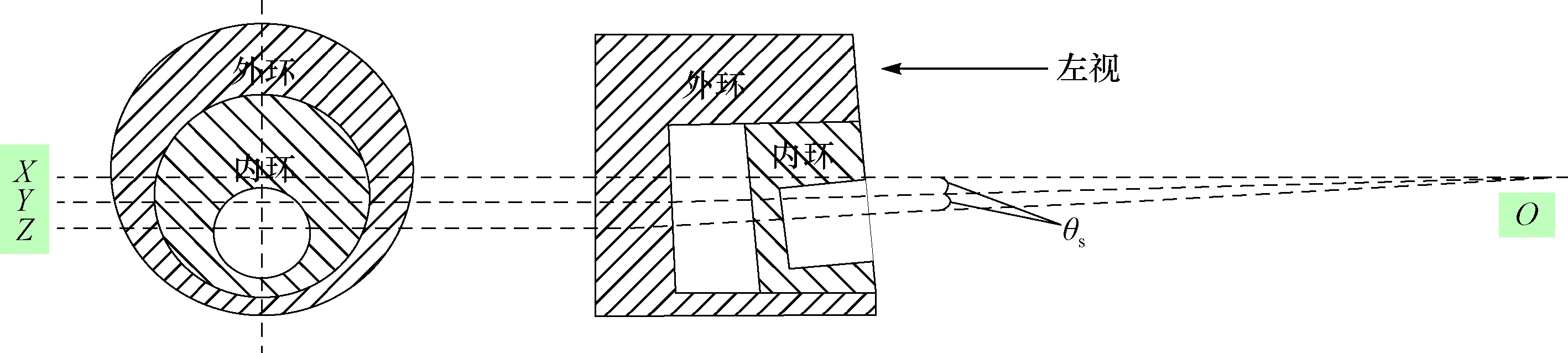
图2 双偏心环结构示意Fig.2 Structure diagram of double eccentric ring
2 测控系统设计及其关键技术
为保证钻井过程中钻头的指向保持不变,需要实时测量工具面角的变化。动态指向式旋转导向钻井工具通过稳定平台驱动电机的转速跟踪钻铤转速,保持稳定平台对地静止;通过电机转速差调整稳定平台稳定时的角位置,即调整工具面角。在机械结构已经确定的情况下,测控系统的设计与实现是导向钻井工具性能提升的关键。
2.1 测控系统组成
动态指向式旋转导向钻井工具原理样机的测控系统包括电机主控制模块、稳定平台数据采集模块、稳定平台驱动电机和稳定平台,如图3所示[6]。其中,电机主控制模块包括主控制器、驱动器、采样电阻、旋转变压器和旋变解码板等,实现稳定平台驱动电机的控制;稳定平台数据采集模块包括稳定平台数据处理器、三轴重力加速度、MEMS速率陀螺和模数转换器等,实现传感器的数据采集。
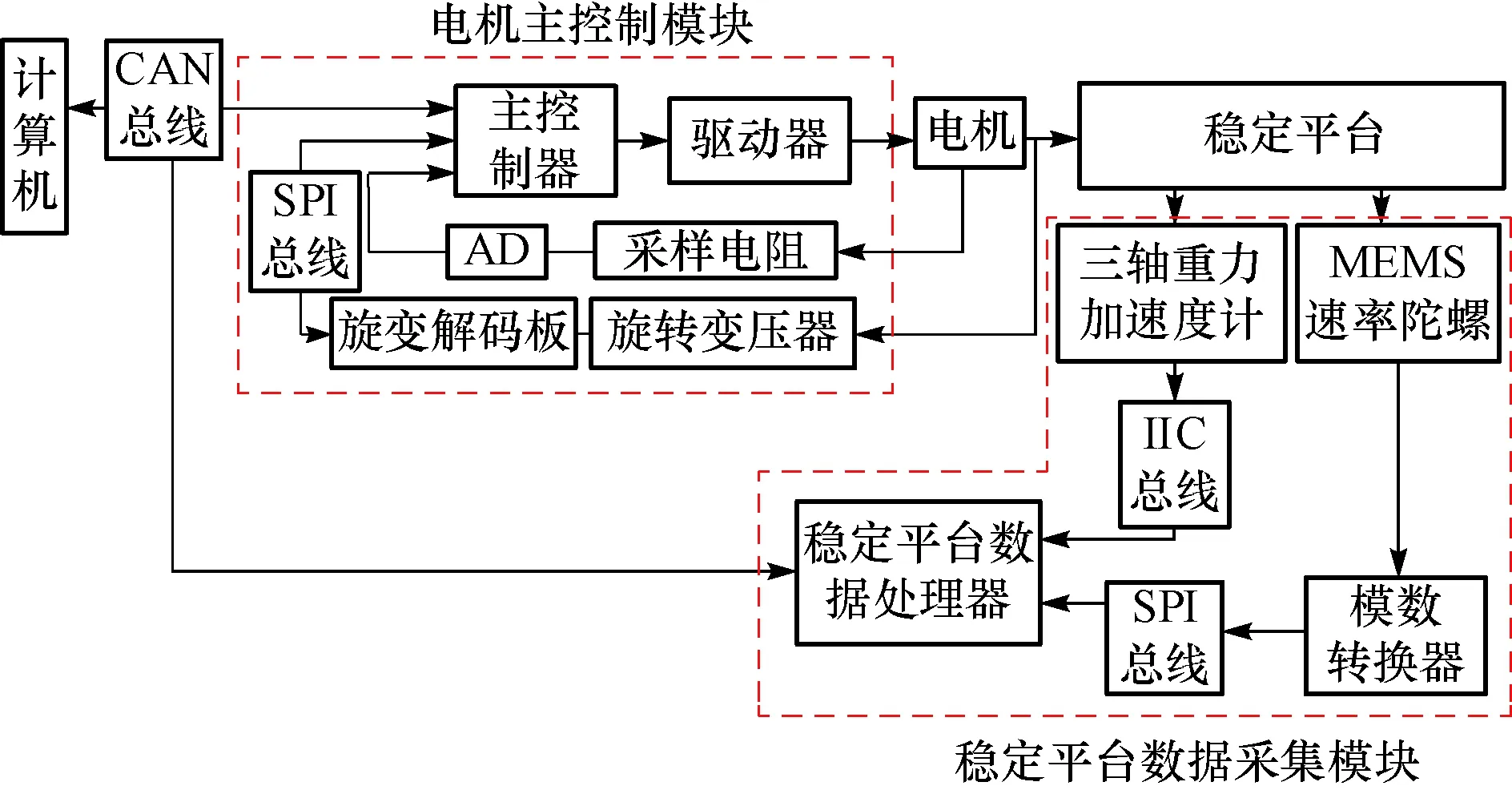
图3 动态指向式旋转导向钻井工具原理样机测控系统结构Fig.3 Structure diagram of the measurement and control system of the dynamic point-the-bit a rotary steerable drilling tool
该测控系统工作时,计算机接收CAN总线上传输的数据。电机电流经采样电阻转化为电压,通过主控制器的AD接口采集电压。电机的转速与位置信息由旋转变压器采集,主控制器通过SPI总线与旋变解码板通信。主控制器将采样得到的电流、转速、位置等信号整合,通过驱动器控制电机的运行状态。稳定平台数据处理器通过IIC总线与三轴重力加速度计通信,采集重力工具面角信号;通过SPI总线与模数转换器通信,采集MEMS速率陀螺信号,然后通过CAN总线将数据传输至主控制器,实现稳定平台转速和位置的控制。
2.2 工具面角测量技术
工具面角的准确测量是提高动态指向式旋转导向钻井工具性能的关键,但钻井过程中的振动、冲击噪声严重影响工具面角的测量精度。为此,提出了基于互补滤波原理的工具面角动态测量方案,分别利用角速度传感器的低频特性和陀螺仪的高频特性,避免了加速度传感器受高频噪声影响大、陀螺仪积分值存在漂移的问题。
工具面角的测量原理如图4所示(图4中:ω为陀螺仪转速,(°)/s;θg为重力工具面角,(°);R为加速度计到稳定平台中心的距离,m)。

图4 工具面角的测量原理Fig.4 Schematic diagram of the measurement of the tool face angle
钻铤旋转时,钻头中心点的轨迹是一个与井底圆同心的圆,井底圆上的最高点A到圆心O点的连线称为高边方向线。钻头中心点B到圆心O点的连线称为装置方向线。以高边方向线为始边,顺着井眼方向看顺时针旋转到装置方向线上所转过的角度称为重力工具面角。利用三轴重力加速度计解算工具面角,安装加速度计时,x轴指向井眼轴线方向,y轴指向井底圆切线方向,z轴垂直于y轴。由y轴和z轴输出的数据可以解算出重力工具面角,计算公式为:
θg=arctan(ay,az)
式中:ay为y轴测得的加速度分量,m/s2;az为z轴测得的加速度分量,m/s2。
重力工具面角既可由三轴重力加速度计解算得到,也可由陀螺仪转速积分得到。陀螺仪动态响应性能好,但是受低频噪声影响存在漂移,长时间会产生累积误差;加速度计无累积误差,但是动态响应性能差,会受到高频振动噪声的干扰。利用陀螺仪和加速度计在频域上的互补性,采用互补滤波算法校正重力工具面角,提高测量精度和系统动态响应性能[7]。互补滤波器的工作原理如图5所示(图5中:g为重力加速度计测量值,m/s2;θω为由陀螺仪解算得到的工具面角,(°);θ为融合加速度计和陀螺仪的解算结果得到的工具面角,(°))。
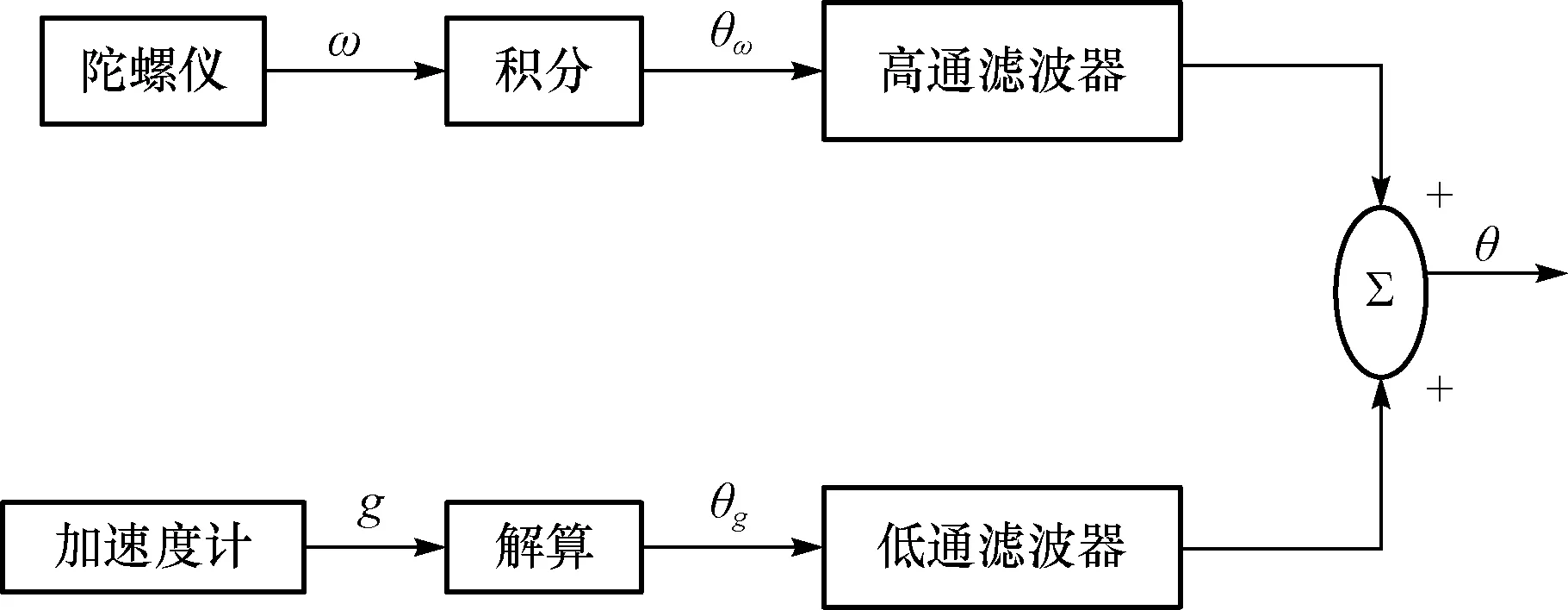
图5 互补滤波器的工作原理Fig.5 Schematic diagram of a complementary filter
θg通过低通滤波器去除高频分量,θω通过高通滤波器去除低频分量,分别用L(s)和H(s)表示低通滤波器和高通滤波器的传递函数。当满足L(s)+H(s)=1时,可获得准确的工具面角。L(s)和H(s)的常见表达式为[8]:
(2)
(3)
基于上述互补滤波算法,可得工具面角的 Laplace表达式为:
(4)
式中:s为Laplace算子;Kp和Ki为控制器参数。
2.3 稳定平台控制技术
动态指向式旋转导向钻井工具的稳定平台与钻头连接轴直接相连,在钻头破岩过程中,会受到高频力矩扰动和井底粘滑等的干扰。目前国内常用电机电流、转速与位置的三环控制方案[9],由于实际钻井过程中存在粘滑工况,该方案无法对钻铤转速的变化快速做出响应。因此,采用了四环控制方案。该方案采用永磁同步电机电流环、电机转速环、稳定平台对地转速环和稳定平台位置环的四环控制系统。由钻头破岩与钻具振动产生的干扰,扰动变化剧烈、幅度大,四环控制方案采用串级控制方式,通过电流环来抑制该类干扰;由负载变化引起的钻铤转速波动、稳定平台转速与钻铤转速静差,分别通过2个转速环来克服;最后利用位置环实现工具面角的平稳与准确控制。四环均采用PID控制算法整定,PID控制算法是根据设定值和反馈值构成控制偏差,将偏差的比例和积分通过线性组合来控制被控对象,消除设定值与反馈值之间的偏差。整个稳定平台控制方案如图6所示[6]。
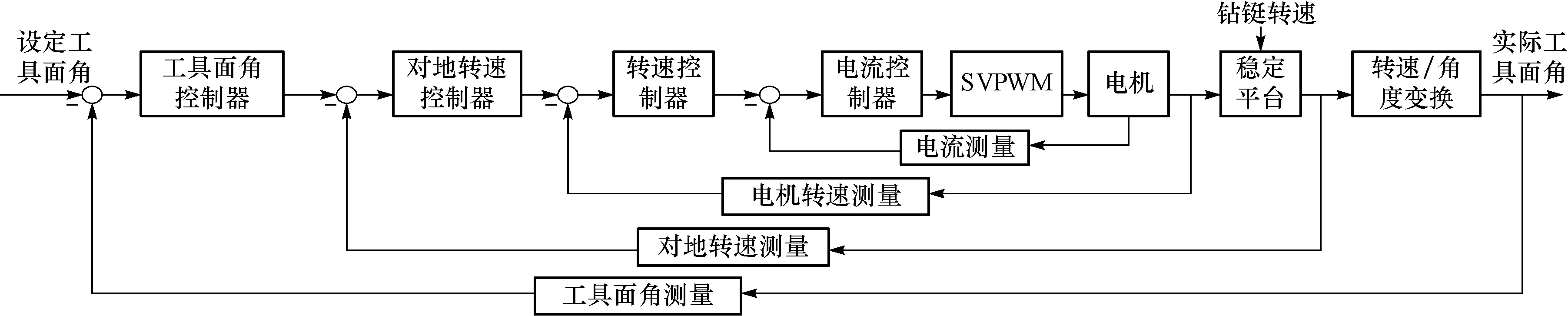
图6 动态指向式旋转导向钻井工具原理样机四环控制方案Fig.6 Block diagram of a four-closed-loop control scheme for the dynamic point-the-bit rotary steerable drilling tool
3 测控系统性能测试
3.1 互补滤波效果测试
理想状态下,钻井工具造斜时,稳定平台对地转速为0,但由于摩擦力和控制精度的影响,稳定平台会以较低转速旋转,转速一般小于5 r/min。因此,测试时控制稳定平台以22.5°/s的角速度、2 s的周期正反转动。系统采样频率为200 Hz,采集40 s数据,利用MATLAB分析测试互补滤波效果,结果如图7所示。
由图7可知:该试验条件下稳定平台运动加速度干扰较为明显,常规三轴加速度计解算工具面角的方法误差较大,互补滤波算法可以有效减弱运动加速度的影响;以旋转变压器的角位置为参考值,以工具面角测量值与参考值的均方根误差为判别标准[10],可得三轴加速度计的均方根误差为2.576 3°/s,陀螺仪角速度积分的均方根误差为5.758 3°/s,而应用互补滤波算法解算的工具面角均方根误差为0.934 1°/s,显著提高了工具面角的测量精度。
3.2 稳定平台控制性能测试
为了检验控制系统的性能,结合钻井过程中导向钻井工具的工作状态,分别模拟了钻铤转速突变和井下粘滑2种工况。为了进一步说明四环控制的性能,比较了现有三环控制方案与笔者提出的四环控制方案之间的差别。
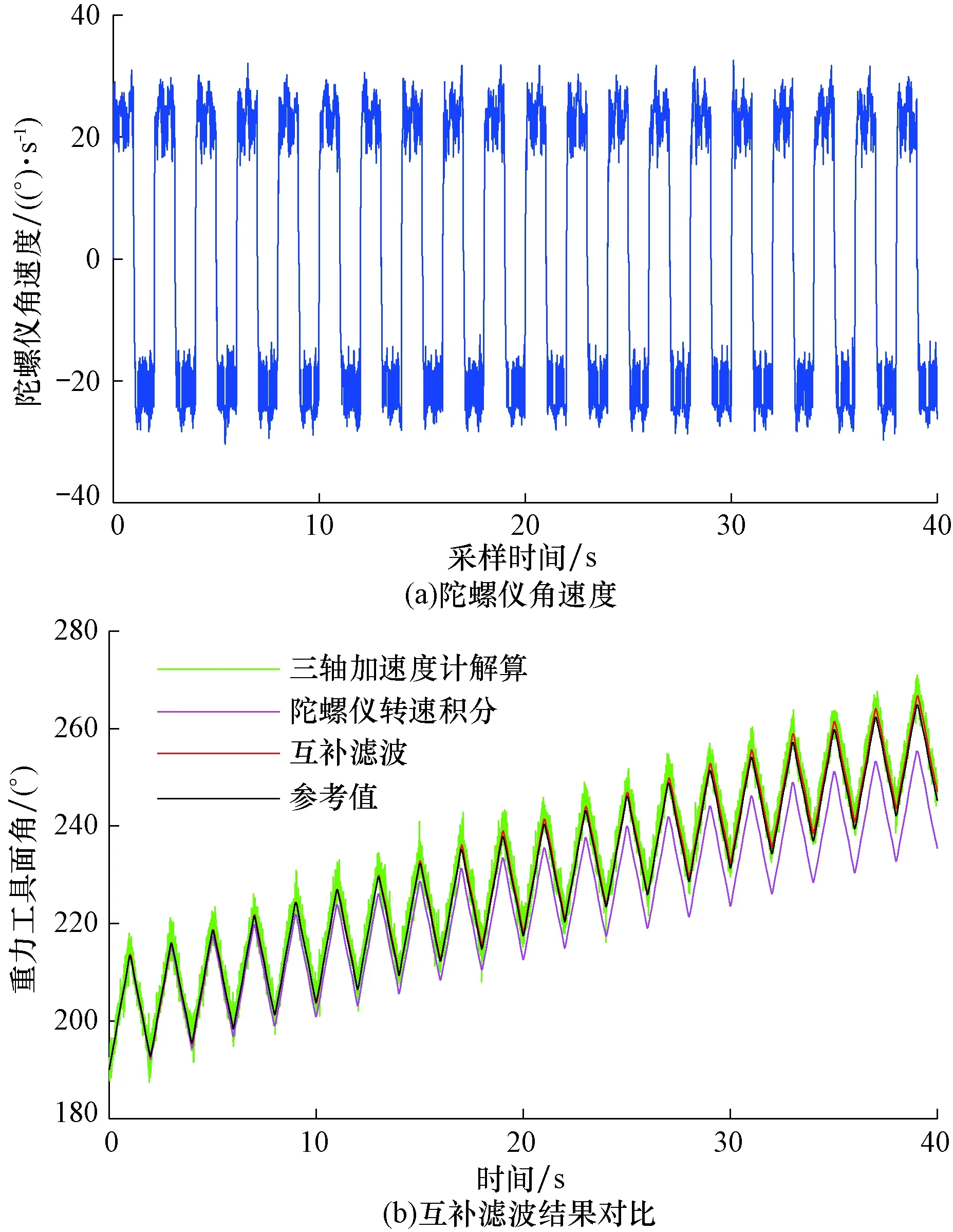
图7 互补滤波效果测试结果Fig.7 Test results of complementary filter attitude
测试方法:首先令钻铤静止,测试工具面角0°~180°阶跃响应性能;当阶跃响应过程结束后,钻铤转速0~120 r/min阶跃并保持120 r/min匀速转动,测试稳定平台位置环的抗阶跃扰动性能,结果见图8。
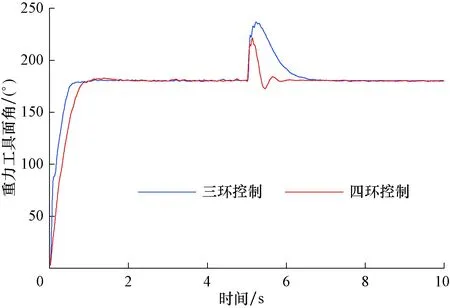
图8 三环和四环控制方案测试曲线对比Fig.8 Test curve comparison between the three-closed-loop and the four-closed-loop control scheme
由图8可知,三环控制方案阶跃测试的超调量为0,调节时间为0.48 s,稳态波动为1.0°;四环控制方案阶跃测试的超调量为0,调节时间为0.735 s,稳态波动为1.0°。上述2个方案均满足性能指标要求。钻铤转速0~120 r/min阶跃动态过程中,工具面角在三环和四环控制方案下均可回到180°,但四环控制方案对钻铤转速突变的抗扰性能更强。
粘滑振动是对稳定平台性能影响较大的干扰因素,是一种由强烈的扭转振动和井下摩阻导致的破坏性极强的振动,会导致钻铤转速剧烈波动,进而造成稳定平台位置波动。文献[11]利用钻铤最大转速与最小转速的差与转速平均值的比值定义了粘滑剧烈程度,称为粘滑度。根据文献[12]介绍的粘滑等级分类,粘滑度高于150%即为最严重的情况。实际钻井工程中,在有钻铤转速干扰的工况下,稳定平台工具面角稳定在设定值±15°范围内[13],就可以保证导向工具以预定轨迹快速稳定钻进。
控制工具面角稳定在180°以后,通过稳定平台驱动电机的转速波动模拟井底粘滑扰动。假设粘滑度为200%,角速度范围为(0°~720°)/s,对变化频率为0.5 Hz的钻铤粘滑扰动进行测试,结果见图9。

图9 粘滑扰动的响应曲线对比Fig.9 Response curve comparison of stick-slip disturbance
由图9可知,三环控制方案在粘滑工况下只能将工具面角控制在±20°,而四环控制方案在粘滑工况下可将工具面角控制在±5°范围内,四环控制方案的抗粘滑扰动能力明显好于三环控制方案,完全能够满足钻井工程技术要求。
4 结 论
1) 根据加速度计和陀螺仪的频域互补特性设计并实现了互补滤波算法。在稳定平台以22.5°/s的角速度、2 s的周期正反转动的工况下测试,互补滤波算法相比三轴加速度计解算方法,工具面角均方差减小了1.642 2°/s;相比陀螺仪积分方法,均方差减小了4.826 9°/s,说明互补滤波算法能够提高工具面角的测量精度。
2) 设计了稳定平台控制系统,采用永磁同步电机电流环、永磁同步电机转速环、稳定平台对地转速环和工具面角位置环四环控制方案。当工具面角给定值为180°时,阶跃响应测试的超调量为0,调节时间为0.735 s,稳态波动为1.0°,满足性能指标要求;当工具面角稳定在180°时,加入钻铤阶跃扰动,四环控制方案能够快速将工具面角控制回180°。与三环控制方案相比,四环控制方案抗扰动性能更好,能够实现工具面角的快速稳定控制。
3) 针对粘滑振动工况进行了稳定平台抗扰动性能测试,四环控制方案在粘滑度为200%情况下可将工具面角波动控制在±5°范围内,抗扰动性能强,能够满足钻井工程技术要求。
