基于计算机视觉的基站天线俯仰角建模识别与测算
2018-12-22肖小潮王臣昊
肖小潮 王臣昊

摘要:基站天线俯仰角是移动通信无线网络优化的重要指标之一,目前仅依靠人工爬站测量,存在诸多弊端。为此,本文试图通过对板状天线俯仰角建模,利用计算机视觉技术实现对基站天线俯仰角的自动识别与测算。研究表明,通过建模可以将俯仰角测算转化为天线侧面矩形识别和其长边斜率的测算问题,并依据工程数据设置矩形筛选条件;利用计算机视觉技术,可以对无人机拍摄照片进行数字图像处理,从而实现俯仰角的自动测算;仿真结果对比网管平台记录验证了该自动测算方法的可行性和准确性。
关键词:计算机视觉;基站天线俯仰角;边缘检测;矩形识别;自动测算
中图分类号: TN820; TP391 文献标识码:A 文章编号:1009-3044(2018)33-0244-04
基站天线俯仰角是移动通信无线网络优化的重要指标之一。基站入网后,因为室外环境因素、维护人员调整后参数更新不及时或调整误差,会导致实际的俯仰角与在网记录的不一致,影响无线网络规划的准确性和通信用户体验。
实际工作中,基站天线俯仰角基本依靠人工爬站测量,存在诸多弊端:第一,存在高空作业的风险和天线辐射的危险性;第二,成本高,塔工爬塔按次收费,数百元每次;第三,人工作业效率低但工作量大,一位熟练的塔工每天爬塔数仅在个位数,而一个二线城市基站数能达到5位数;第四,测量差异化大,不同熟练程度的塔工的测量存在较大误差。即便如此,目前对于优化天线参数测量方法的研究非常少。秦岭[1]提出使用改进的全站仪,测量铁塔天线关键点位的三维坐标换算计算俯仰角等参数,但全站仪体积不小,且对于安装环境复杂的天线存在远距离测量受限的问题;金超等[2]和陈建林等[3]对俯仰角测量的研究都是利用卫星测算,这对于移动通信中的天线并不适用。
本文对基站天线俯仰角几何建模,并结合工程数据设置筛选条件完善模型,利用计算机视觉技术对无人机拍回的照片处理,解决基站天线俯仰角的自动测算问题。仿真结果验证了该方法的可行性和准确性。
1基站天线俯仰角识别测算建模
1.1基站天线俯仰角的几何模型
基站天线多为板状定向天线,如图1所示,正面呈曲率半径较大的矩形弧面,对外收发信号;两个侧面是矩形平面,分别与背面和水平面垂直;背面亦是矩形平面,可以以固定角度连接俯挂在抱杆上。假设板状天线背面所在平面与水平面的夹角[β],[α=90°-β]即为无线专业所关注的天线俯仰角。
设板状天线的侧面、背面和水平面的交点为O,在侧面和背面的交线上取任意点B(非点O),在侧面与水平面的交线上取任意点A(非点O),在背面与水平面的交线上取任意点C(非点O)。因为板状天线的侧面同时与其背面和水平面垂直,所以背面和水平面的交线[lCO]是侧面的垂线,从而得到[lBO⊥lCO]和[lAO⊥lCO]。因此,计算[AOB]即可得到板状天线背面与水平面的夹角[β],也即算出[lBO]的斜率可以算出俯仰角。
因此,通过建立几何模型,基站天线俯仰角的测算可以转化成天线侧面矩形的识别和其长边的斜率计算问题。
1.2完善模型的工程筛选条件
摄于工程环境的图像由于背景的复杂不确定、成像的畸变和色差,以及处理产生的误差,可能会识别出不止一个矩形图像,干扰了天线侧面的识别。因此,需要依据一定的工程数据设置筛选条件,完善识别模型,对干扰矩形进行排除。
筛选条件一:现网中集采的板状天线规格型号非常有限,且侧面矩形的长宽比均在8:1以上。在对矩形长宽比筛选后,如有必要可以结合天线尺寸进一步匹配。
筛选条件二:考虑到灰尘、光线等因素产生的颜色污染和成像误差,图像中的天线侧面矩形内部呈灰白色,可以通过一定的像素值范围限定筛选。
筛选条件三:对于通过条件一和二筛选剩余的矩形,计算其长边的斜率[φ],若[φ-90°]在具有工程实际意义的俯仰角设定范围之外,则可以进一步排除干扰矩形。一般俯仰角范围是[3°~12°],并集中在[8°]左右。
2基于计算机视觉的俯仰角识别测算
如上所述的天线俯仰角测算模型的计算机处理环节可简单分为基于计算机视觉的天线侧面矩形检测和检出矩形的长边斜率测算。
2.1基于Canny算子和多边形曲线逼近的矩形识别
基于计算机视觉的矩形识别首先需要进行边缘检测,再识别其中的矩形区域。
2.1.1Canny算子边缘检测
图像中的边缘[4]一般是指图像中像素较为均匀的区域与局部周围灰度级有明显不同的区域的交界。在描述边缘的属性时一般使用法线方向和强度。法线方向是指边缘某点局部周围灰度變化最剧烈的方向,强度是指沿法线方向灰度变化的量度。因为导数可以表达函数的变化率,所以对于离散二维像素点构成的图像,计算机可利用一阶或二阶微分算子的几何意义寻找边缘。
经典的边缘检测的算子很多,一阶微分算子有Roberts 、Sobel 、Prewitt,二阶微分算子有Laplacian、Log/Marr,此外还有基于一阶微分和约束优化问题的Canny算子等。Canny算法较为复杂,但能检测出弱边缘有较好的抗噪性能。考虑到实际应用场景的复杂性,在此选择Canny算子[5-7]的边缘检测,步骤如下:
首先,将灰度化后的图像高斯滤波。利用二维高斯分布函数,计算一个[3×3]的矩阵,并对该矩阵归一化,得到新的矩阵作为权值模板,对图像卷积实现滤波降噪。其中,归一化前矩阵的中心点取二维高斯分布函数在原点的值,以此类推。
最后,双阈值检测真边缘。对于第三步检出的边缘,可能存在噪声造成的假边缘,因此需要设置阈值对梯度幅值[gx,y]进行过滤。阈值设置过低无法排除大部分假边缘,阈值设置过高会造成弱的真边缘被错误排除,因此在Canny算子中采用了双阈值检测。排除[gx,y]小于低阈值的边缘像素,保留[gx,y]大于高阈值的边缘像素;对于[gx,y]介于两个阈值中间的边缘像素,若其八邻域中像素点的[gix,y]均大于低阈值,且存在大于高阈值的[gnx,y],则该像素点也判定为边缘像素。
为了提高Canny算子边缘检测的成功率,还可以在检测前后对图像进行一些变换处理。比如,在检测前先使用向下采样的金字塔分解,再使用向上采样的金字塔分解进行平滑处理;在检测后使用膨胀处理,使相近的一些不连续边缘连接起来,方便寻找连通域,确定正确的边缘。
2.1.2多边形曲线逼近的矩形识别
对检出的边缘识别其中的矩形常用两种思路,一种利用霍夫变换[8]检出边缘线中的直线,根据直线之间的几何关系识别出矩形;另一种对边缘提取轮廓信息,使用多边形曲线的点集逼近来获取其中的矩形轮廓。
具体为,首先提取边缘里的轮廓信息,包括组成一个轮廓的所有点的坐标集合和轮廓之间的层次关系;其次,设定曲线逼近轮廓的精度[ε],对每一个轮廓使用道格拉斯算法[9]获得最少的轮廓分割点,满足轮廓上任意两个相邻分割点之间的点到连接这两个分割点的直线的距离都不大于[ε],依次连接所有相邻分割点的折线即逼近轮廓的多边形曲线;最后,当近似的多边形曲线判断为闭合凸四边形,且利用余弦定理计算共点的两条折线夹角为[90°]时,判断存在矩形。
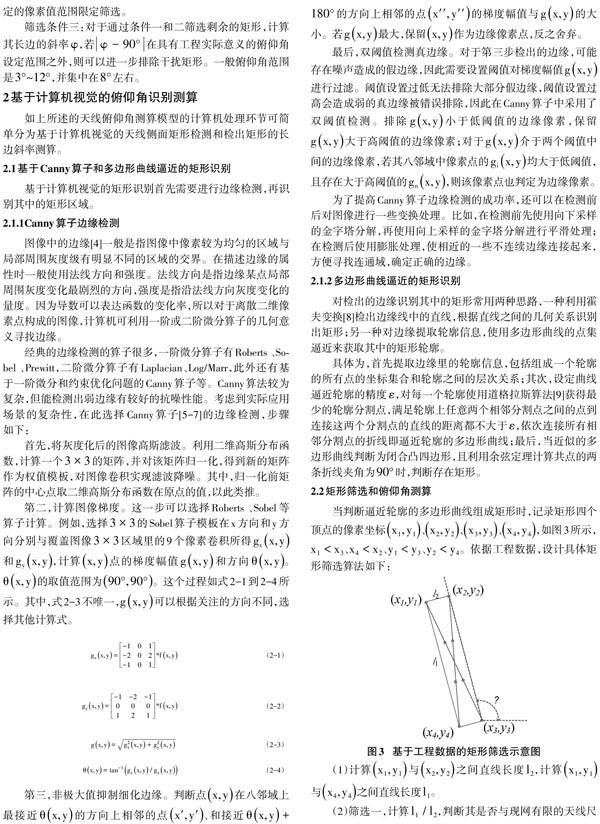
2.2矩形筛选和俯仰角测算
判断这四个像素RGB三通道各自的均值是否在设定的数值范围内。之所以取近似三等分点,是因为精确的三等分点不一定与像素点位置重合。
(4)筛选三,判断矩形长边斜率[φ]与[90°]差值的绝对值是否在有工程意义的俯仰角设定范围[3°~12°]内。
经过三次筛选排除干扰矩形后,认为剩下的矩形符合基站天线侧面矩形的特征条件,记录[φ-90°]即为基站天线俯仰角。
3应用仿真
根据上述模型和算法,整理工程环境中的基站天线俯仰角测算流程如图4所示。根据资管平台记录的待测基站天线的位置、高度和方向角参数,遥控无人机飞行至该天线附近,微调并悬停后拍摄天线侧面待识别测算的照片[10]。
现选取周围楼宇环境较为复杂的现网某楼顶站点进行仿真和实测结果的比对验证:
(1)仿真结果:针对该小区天线使用无人机拍摄照片,成功识别出符合本文模型条件的图片如图5所示,同时根据图片计算测得俯仰角为[9.19422°]。
进一步分析仿真细节。由上文的建模可知,在对无人机拍摄照片处理时,需识别出满足天线侧面长宽比、有效斜率范围和像素值条件的天线侧面矩形,并根据矩形长边的斜率换算出俯仰角。若不考虑这些工程筛选条件,将会识别出如图6所示的结果:除了可以用于计算俯仰角的矩形外,还有大量背景大楼上的窗户和外墙砖。因此,对该站点的仿真也可以验证本文的模型在识别干扰较大的条件下的测试结果。
在图6的基础上,参照图4的仿真流程,添加工程筛选条件:①设置长宽比在[9.7?11.3],②RGB三通道取值范围R[65-95]、G[65-95]、B[55-105],③保留长边斜率在[78°?87°]以及[93°?103°]之内的矩形。最终得到图5所示的识别结果,换算得到俯仰角为[9.19°]。
(2)实测结果:该站点经现场塔工测量,实际下倾角约为[9°],与图7所示的前期资管录入的数据一致。
(3)仿真与实测结果比对:在忽略计算机计算精度、人工测量误差的情况下,可以认为两者结果一致。
(4)推广应用:继续对现网30个站点合计约120面天面进行推广使用,验证表明,该仿真软件与现网实测值基本一致,具有较高的准确性,具备推广应用条件。
4结束语
本文对天线俯仰角测算建立了几何模型,提出利用计算机视觉技术实现识别和测算,并根据工程数据进一步排除处理干扰。仿真结果验证了本文方法的可行性和测算的准确性。下一步,针对俯仰角测算,可以补充完善本文提出的几何模型,研究通过识别天线其他面实现测算的方法;也可以针对基站天线的另外两个参数高度和方向角的自动获取问题展开探讨。
参考文献:
[1] 秦岭.通信铁塔安装质量检测系统的设计与应用[J].广东通信技术,2016(9):65-68.
[2] 金超,张万才.多波束天线指向的校准[J].无线电通信技术,2003,29(6):33-36.
[3] 陈建林,周灏,张姗姗.Windows Mobile嵌入式手机天线参数计算器的设计[J].电视技术,2011,35(18):78-80.
[4] 贺桂娇.几种经典的图像边缘检测算子分析比较[J].计算机光盘软件与应用,2014(9):182-183.
[5] 康牧.图像处理中几个关键算法的研究[D].西安電子科技大学,2009.
[6] 许宏科,秦严严,陈会茹.一种基于改进Canny的边缘检测算法[J].红外技术,2014,36(3): 210-214.
[7] Canny J. A Computational Approach to Edge Detection[J].Pattern Analysis and Machine Intelligence, IEEE Transactions on, 1986(6): 679-698.
[8] 段汝娇,赵伟,黄松岭,等.一种基于改进 Hough 变换的直线快速检测算法[J].仪器仪表学报,2010,31(12):2774-278.
[9] Douglas D H, Peucker T K, Algorithms for the Reduction of the Number of Points-Required to Represent a Line or Its Caricature [J]. The Canadian Cartographer, 1973,10(2): 112-122.
[10] Gary Bradski, Adrian Kaebler,于仕琪,刘瑞祯译.学习OpenCV[M].清华大学出版社,2009.
【通联编辑:光文玲】
