蚱蜢仿生机器人腿部结构分析与设计*
2018-12-18熊勇刚彭未来熊凯旋刘亚春
熊勇刚,彭未来,熊凯旋,刘亚春
蚱蜢仿生机器人腿部结构分析与设计*
熊勇刚,彭未来,熊凯旋,刘亚春
(湖南工业大学 机械工程学院,湖南 株洲 412007)
以生物学蚱蜢的腿部构造为基础,建立仿蚱蜢腿部跳跃机器人杆件模型,模仿蝗虫后腿结构,设计了仿蚱蜢跳跃机器人弹跳腿,利用人工肌肉收缩拉动三连杆快速摆动实现起跳。建立了弹跳机构的动力学模型,用ADAMS进行仿真,结果显示了弹跳腿在高爆发高输出方面的可行性。
蚱蜢;后腿结构;人工肌肉;弹跳机构
1 引言
有关仿生跳跃机器人的研究领域里,国内和国外已经做了很多相关的工作并且取得了初步的研究成果,比如制作了仿袋鼠机器人、仿蟋蟀机器人、仿蝗虫机器人等。目前,仿生机器人的研究主要集中在两个方向,即生物运动机理的研究和生物行为方式的研究[1]。
近年来,越来越多的研究人员开始对跳跃机器人的性能研究。在对跳跃机器人研究中,很多都是模仿具有跳跃能力的生物,比如青蛙[2]、蝗虫[3-6]、跳蛛[7]等。蚱蜢是公认的“跳跃专家”,其跳跃能力为其身长的15~30倍[8-9]。蚱蜢的跳跃运动有强大的越障能力、极快的跳跃速度、强大的地面适应性、广阔的运动范围、跳跃运动的多次持续性、方向可控性、跳跃运动的爆发性和突然性等特点。
本文尝试采用新的驱动方式来对仿蚱蜢的跳跃机器人的机构进行设计,从蚱蜢的跳跃仿生原理着手,根据蚱蜢在跳跃的过程中运动激励,设计出模仿蚱蜢的弹跳后腿,利用气动肌肉系统即人工肌肉来模拟蚱蜢后腿的相关肌肉结构,为更深一步地深入研究仿蚱蜢跳跃机器人提供借鉴和参考。
2 蚱蜢后足结构
蚱蜢的跳跃主要靠其强劲而有力的后足,后足主要由腿节、胫节和跗节构成,其中腿节与躯体相连,跗节延伸处为跗足,腿节与躯体、腿节与胫节、胫节与跗节之间分别通过腿关节、膝关节和跗关节连接,可相对转动。后足结构如图1所示。蚱蜢如果能顺利起跳,必须有足够的克服地面反作用力的力和足够快的起跳速度,后足腿节的肌肉非常发达,可充分满足这些起跳需求。蚱蜢腿节的肌肉由伸肌和屈肌组成,相互合作共同完成蚱蜢的起跳动作,如图2所示。
蚱蜢跳跃过程中,伸肌收缩储存的能量、输出的功率与时间的关系如图3所示,要设计或研究一个蚱蜢腿部结构的仿生机构,必须使所设计的模型具有类似于腿部肌肉和半月板的一个能量储存和释放机构,例如弹簧、气液压缸、电动机、气动肌肉等使得所设计仿生模型储备完能量后能释放能量完成起跳的外部激励元件。

图1 蚱蜢腿部结构图

图2 蚱蜢腿节肌肉图
3 腿部机构模型的建立
蚱蜢的跳跃运动的动力主要来源于其强劲而有力的后足,在最初准备起跳的阶段到离地的阶段,蚱蜢后腿从几乎完全折叠到完全伸展的过程中,后腿关节的夹角在非常短的时间内发生了大范围变化,蚱蜢在一次最长距离的跳跃过程中,其腿部肌肉在收缩的过程中也达到了最大输出状态。由于蚱蜢左右两侧肢体在向前跳跃时,其运动规律基本保持一致,因此在建立机构模型时为了进行简化,可以只考虑单侧模型,机构模型如图4所示。
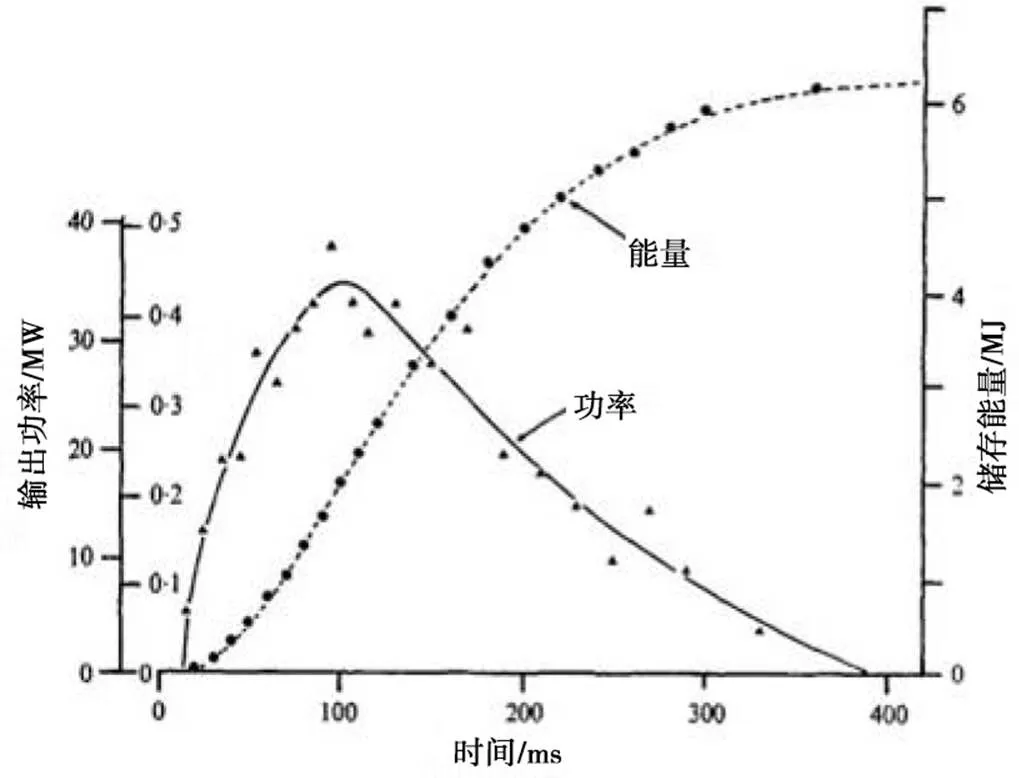
图3 能量、输出功率时间变化图
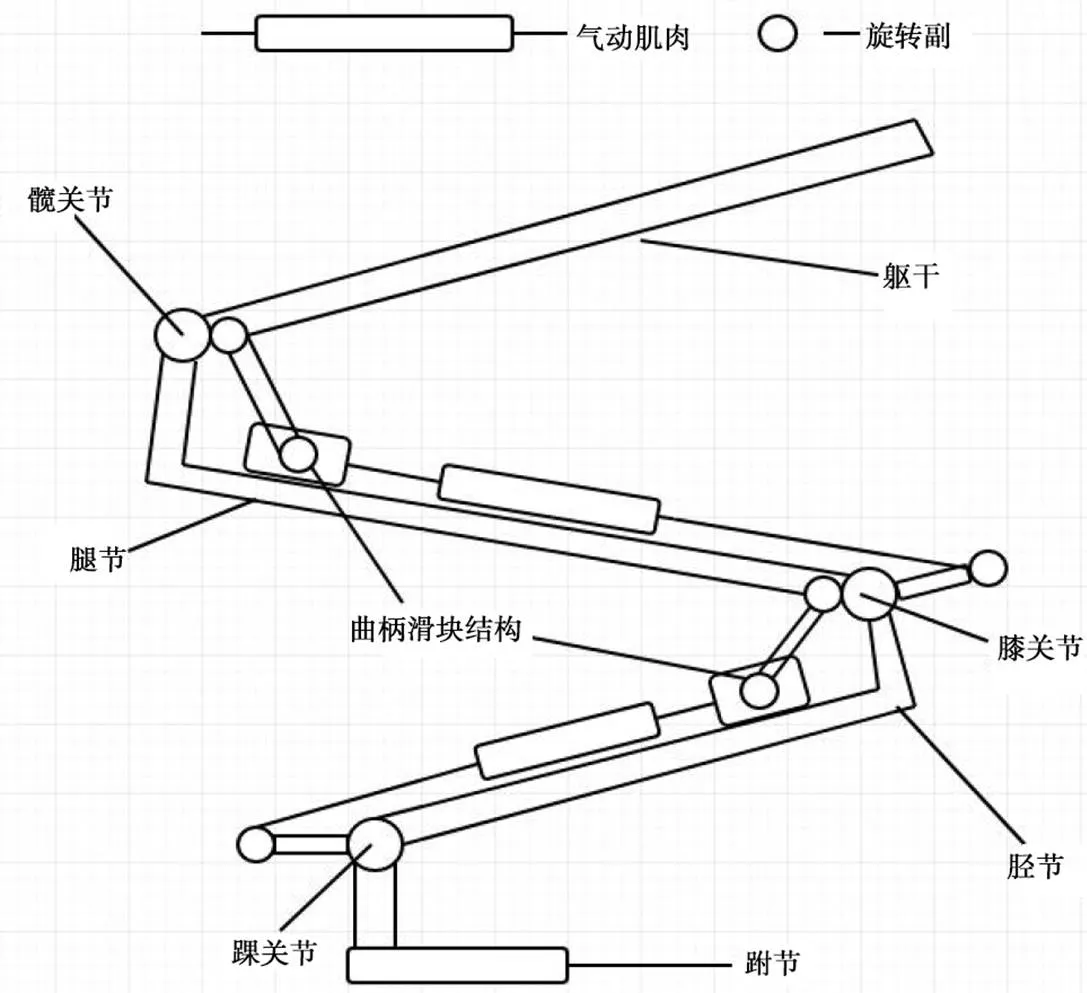
图4 结构模型示意图
生物肌肉具有较大柔韧性,它通过肌腱等柔性件与骨骼相连,进行直接作用,效率较高;由于气动肌肉和生物肌肉在结构尺寸上相差较大,在横向上不能受力并且不能产生位移,因此需将气动肌肉与骨骼直接相连,没有复杂的传动装置,也没使用弹簧等弹性件进行关节的复位等操作。
根据蚱蜢后腿的组成结构与起跳方式,采用三连杆作为仿真结构,并且采用气动肌肉作为跳跃过程中的驱动装置。如图5所示,人工肌肉在充气时,径向的扩张带动轴向的收缩,进而产生牵引力,从而带动负载进行单向运动,该过程可以模拟蚱蜢后腿肌肉的伸缩。在蚱蜢跳跃的过程中,首先对气动肌肉充气,从而让其完成径向扩张、轴向收缩,利用曲柄滑块机构拉动杆转动,该过程在很短时间内完成。
整个弹跳过程分为2步:①对人工肌肉即气动肌肉充气,使其快速收缩,从而拉动曲柄滑块机构,让关节瞬间张开,完成跳跃的动作;②跳跃之后,人工肌肉放气,重新舒张,返回初始状态。
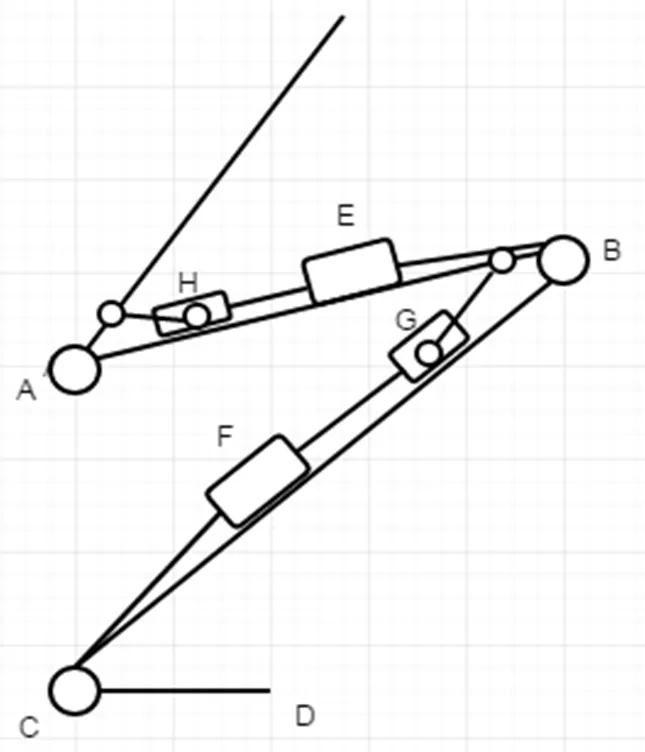
图5 结构简图
注:杆AB、BC、CD分别为模仿蚱蜢后腿的股骨、胫骨与跗足,E与F为人工肌肉,G与H为曲柄滑块机构。
4 仿蚱蜢弹跳腿的分析与仿真
4.1 仿蚱蜢弹跳腿动力学分析
本章所建模型旨在体现起跳时模型的突然性和爆发性,使模型起跳时具有足够的爆发力,以改善仿蚱蜢腿部模型的跳跃性能。因此只针对模型起跳时进行动力学分析,分析其起跳时所具备的全部能量,阐明蚱蜢跳跃的能量传输规律。
系统的动力学方程,即拉格朗日方程如下:


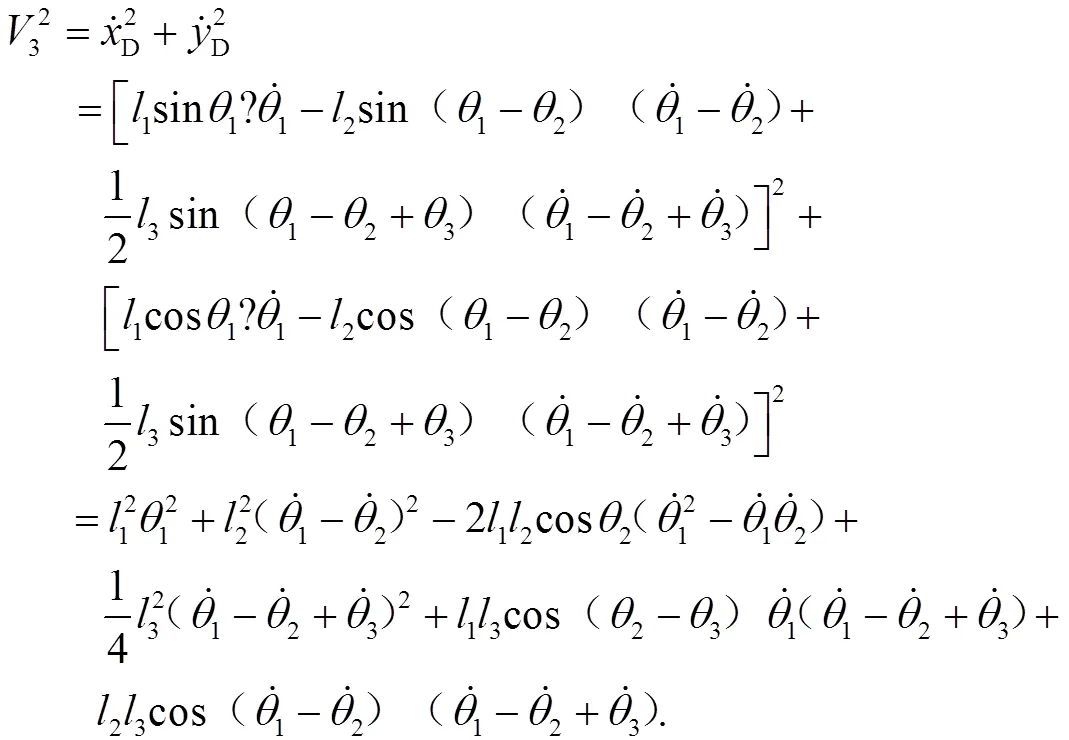
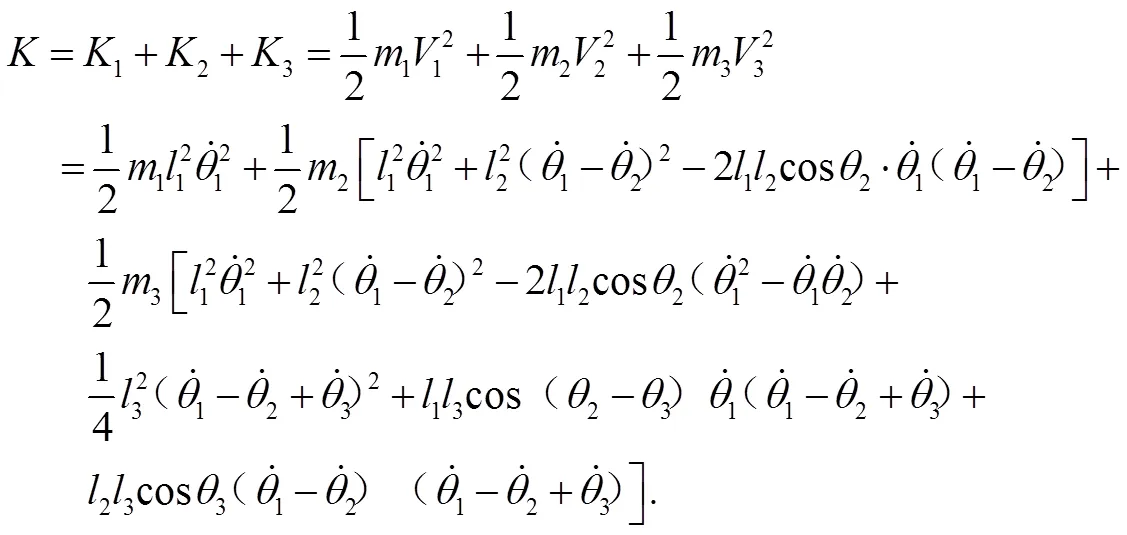
计算拉格朗日函数时,需要求出各连杆的总动能和总位能,假设各连杆的质量分别为胫节1、腿节2、躯体3,以连杆末端的点质量表示,加速度分别为1,2,3,动能分别为1,2,3,位能分别为1,2,3,则拉格朗日函数的表达式就为:
=1+2+3-1-2-3.
胫节(1)的动能和位能为:

腿节(2)的动能和位能为:

连杆2的动能为:

位能为:
躯体质心的动能和位能为:
躯体质心处的动能为:
位能为:

那么总的动能为:
总的位能为:

因此,仿蚱蜢腿部跳跃机器人模型起跳阶段的拉格朗日函数表达式为:
4.2 动力学仿真
利用ADAMS对三维模型进行跳跃运动的仿真和验证。由于人工肌肉存在单次响应快、作用时间短和作用力大的特点,因此在仿真分析中可近似看作一个初始作用力大、弹性系数也较大的扭簧。图6中弹跳腿跳跃仿真过程起跳时,由于关节处力矩作用,两关节迅速张开,通过最底部关节与地面的作用,实现起跳。在仿真过程中作如下假设:所有部件均为刚体,在跳跃过程中不存在形变;部件与地面有较大摩擦因数,使得其在跳跃过程中水平方向位移很小。观察跳跃过程中各关节运动轨迹,与试验观测现象对比,基本符合蝗虫后腿运动过程。
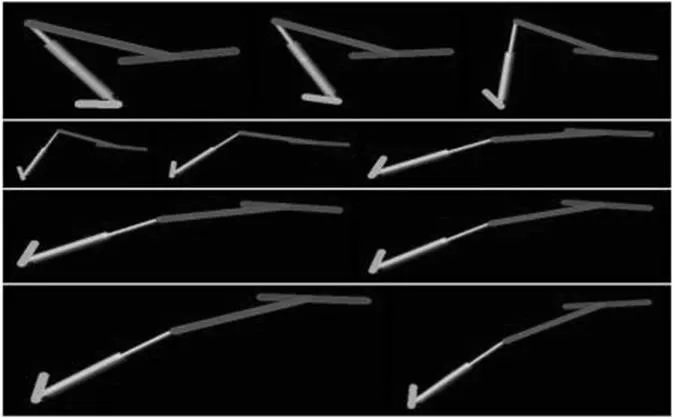
图6 跳跃动态图
4.2.1 位移分析
腿部、质心处方向和质心处方向的位移分别如图7、图8、图9所示。从中可以看出,不管是各肢体的方向位移还是质心的方向位移,都是呈逐渐增长的趋势的,说明模型的跳跃趋势是一直再往方向前进,并未出现翻转或是旋转;而方向的位移,跗节处的方向位移是增长最小的,增长最大的是质心处的位移。

图7 腿部位移
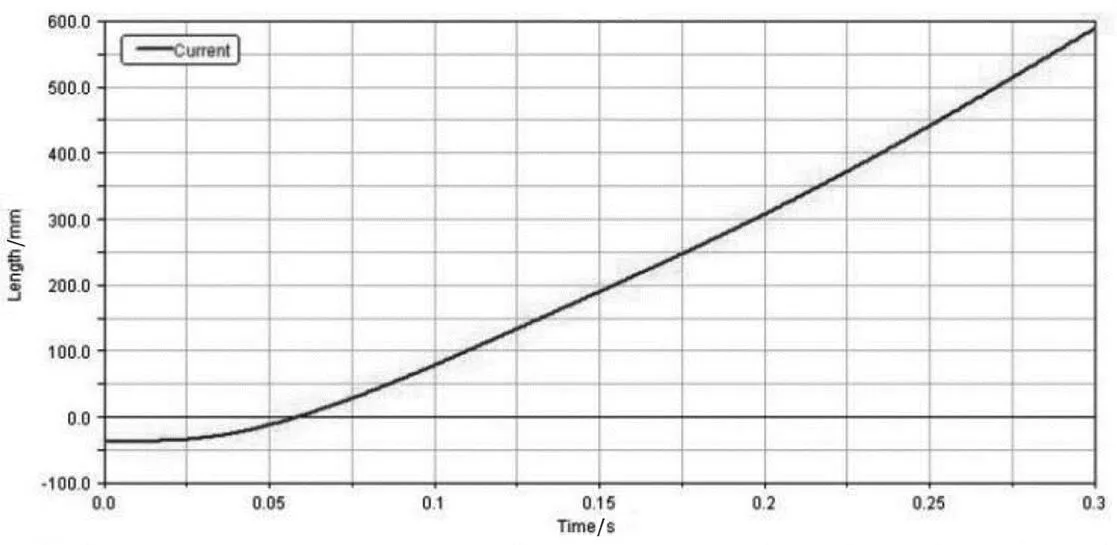
图8 质心处x方向位移

图9 质心处y方向位移
4.2.2 速度分析
腿部速度、质心方向速度和质心方向速度分别如图10、图11、图12所示。从中可以看出,在0~0.05 s之间,速度是不断升高的,模型在此阶段跳跃时可以体现出突然性和爆发性,在极短的时间里速度迅速上升;而质心方向速度在0.08 s处曲线呈现下降的趋势,是质心再往峰值点缓慢靠近的原因,在0.3 s左右达到峰值点后再为落地做准备。其中速度曲线不平滑或是存在突变都有可能是模型跳跃时系统不稳定造成的。

图10 腿部速度

图11 质心x方向速度

图12 质心y方向速度
4.2.3 加速度分析
腿部加速度、质心方向加速度和质心方向加速度分别如图13、图14、图15所示。从中可以看出,速度曲线变化大的同时加速度曲线也随之变化,由于设置的驱动函数的关系,不管是腿部还是质心加速度在0.05 s和0.2 s时都有 突变,0.05 s时的突变是因为模型能体现出突然性和爆发性,0.2 s时的加速度突变是因为模型将要达到峰值时膝关节的姿态调整,目的是使开始进入落地状态时系统更加稳定。
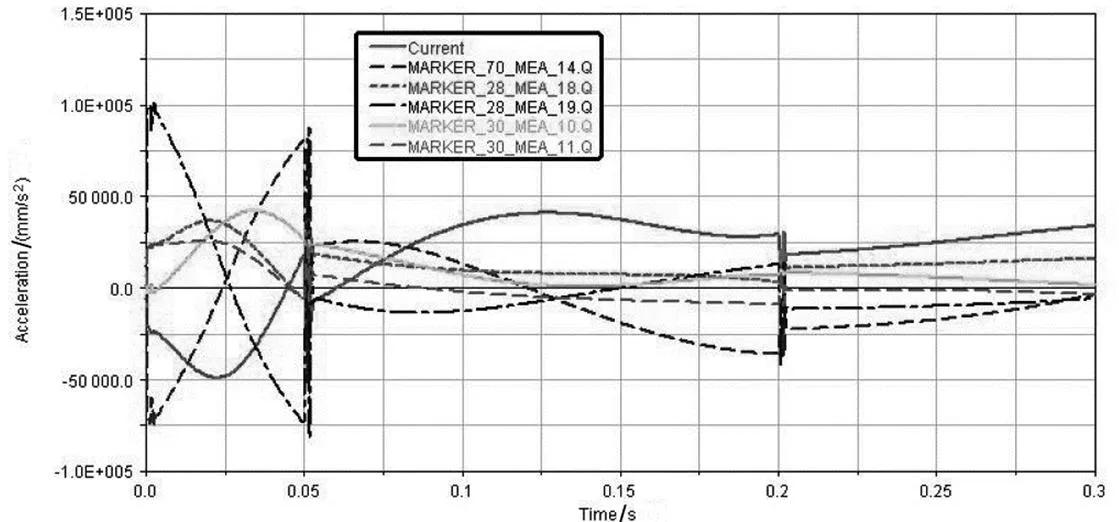
图13 腿部加速度

图14 质心x方向加速度

图15 质心y方向加速度
4.2.4 力矩分析
建模时视各个部件为刚性杆件,跳跃初始时脚掌与地面没有相对滑动,忽略关节间摩擦。按上述预设的关节运动轨迹,仿蚱蜢腿部跳跃机器人的关节力矩曲线如图16所示。

图16 各关节力矩
图16中的力矩为各关节附加的动力矩,它反映了各个关节动力矩的变化趋势、最大值和最小值。预期得到的力矩必须在这个范围内才能保证跳跃的合理性和可行性。
当给予气动肌肉一个的推力和曲柄滑块机构一个向上的10 N的推力时,三个关节中,膝关节受到的力矩是最大的,在整个跳跃过程中,跗关节所受的力矩最小,其变化趋势如图17所示。

图17 跗关节力矩
5 结论
通过在ADAMS虚拟环境中进行仿蚱蜢跳跃机器人的运动仿真,分析了仿蚱蜢腿式跳跃机器人在整个运动过程中的关节轨迹规律,并借用仿真数据对机器人和气动肌肉的运动学方程进行验证,使结果更加可靠,并且通过提取ADAMS仿真中的数据,计算了仿真中气动肌肉的理论输出力矩,结果显示出了气动肌肉在爆发性和高输出方面的可行性。本文利用人工肌肉进行弹跳后腿的设计,为仿生跳跃机器人的研究提供了借鉴和参考。
[1]迟冬祥,颜国正.仿生机器人的研究现状及其未来发展[J].机器人,2003,23(5):476-480.
[2]Wang M,Zang X Z,Fab J Z,et al.Biological jumping mechanism analysis and modelin for frog robot[J].Journal of Bionic Engineering,2008,5(3):181-188.
[3]Clark H.The energetic of the jump of the locust schistocerca gregaria[J].Journal of Experimental Biology,1975,63(1):53-83.
[4]Cochrane D,Elder H,Usherwood P.Physiology and ultrastructure of phasic and tonic skeletal musclefibers in the locust,schistocerca gregaria[J].Journal of Cell Science,1972(10):419-441.
[5]Burrows M,Morris G.The kinematics and neural control of high speed kicking movements in the locust[J].Journal of Experimental Biology,2001(204):3471-3481.
[6]杨绘宇,王石刚,梁庆华,等.仿蝗虫跳跃机器人起跳过程运动学建模及分析[J].机械设计,2010,27(4):54-57.
[7]Parry D,Brown R.The jumping mechanism of salticid spiders[J].Journal of Experimental Biology,1959(36):654-664.
[8]Heitler W J.How grasshoppers jump[D].Scotland:The University of St Andrews,2007.
[9]Bennet-clark H C.The energetics of the jump of the locust schistocerca gregaria[J].The journal of experimental biology,1975(63):33-83.
熊勇刚(1966—),男,湖南株洲人,教授,博士,硕士研究生导师,主要研究方向为机械动力学、机械设计及理论。
彭未来。
湖南省自然科学基金项目(编号:2017JJ2065);国家自然科学基金资助项目(编号:51345005)
2095-6835(2018)23-0001-05
TP24
A
10.15913/j.cnki.kjycx.2018.23.001
〔编辑:严丽琴〕
