激光聚焦扰动作用下高超声速边界层稳定性实验研究∗
2018-12-02刘小林易仕和牛海波陆小革
刘小林 易仕和 牛海波 陆小革
(国防科技大学空天科学学院,长沙 410073)(2018年6月19日收到;2018年7月9日收到修改稿)
在马赫数6、单位雷诺数3.1×106/m的条件下对半锥角7◦直圆锥边界层稳定性开展了实验研究.以激光聚焦于流场中局部空间而产生的膨胀冲击波作为人工添加的小扰动,分析了该扰动对高超声速圆锥边界层流动稳定性的影响.实验中利用响应频率达到兆赫兹量级的高频压力传感器对圆锥壁面脉动压力进行测量,通过对压力数据进行短时傅里叶分析和功率谱分析发现,相比于不添加激光聚焦扰动的结果,添加激光聚焦扰动使边界层中第二模态波的出现位置提前,且扰动波的幅值大幅度地增加,在相同的流向范围内,激光聚焦扰动将边界层中的扰动波从线性发展阶段推进到非线性发展阶段,其对边界层中扰动波发展的促进效果明显.同时,激光聚焦位置的不同对边界层中扰动波的发展也具有不同的影响.当激光直接聚焦于圆锥壁面X=100 mm位置时,边界层中频率为90 kHz的扰动波幅值增长最快,在X=500 mm的位置处其幅值放大倍数为3.81,相比而言当激光聚焦位置位于圆锥前方自由来流中时,边界层幅值增长最快的扰动波频率大幅减小为73 kHz,相同范围内,其幅值放大倍数为4.51倍.由此可见,当激光聚焦位置位于圆锥上游的自由来流中时,其对边界层中扰动波的影响更为显著.
1 引 言
边界层由层流到湍流的转捩问题一直以来都是流体力学研究领域中的热点前沿课题.高超声速条件下的边界层转捩研究除了重要的理论价值以外,也具有巨大的工程应用前景,它广泛存在于许多工程应用问题之中,例如高超声速飞行器的舵面绕流、发动机进气道内流动等.它对高超声速飞行器的气动力、气动热以及发动机启动等关键问题都有着重要的影响,例如当边界层由层流变为湍流状态时,飞行器表面摩擦阻力和热流通常成倍增加,湍流状态下的摩擦系数和传热系数远大于层流.因此,飞行器表面边界层的流动状态直接影响到飞行器的摩擦阻力、热防护等问题,研究边界层转捩以及准确预测边界层转捩位置,对于降低阻力、减少热流、提高升阻比、改善飞行器气动性能有着重要应用价值.边界层转捩是一个非常复杂的问题,它受来流湍流度、雷诺数、粗糙度、压力梯度以及壁面温度等众多因素的共同影响,因此边界层从层流发展为充分湍流的具体过程也不尽相同.1994年,Morkovin等[1]对边界层转捩可能存在的方式进行了系统梳理概括,指出当自由来流的湍流度较低时,边界层转捩方式为一种自然转捩的方式,边界层中扰动波会经历从扰动产生(感受性过程)到扰动线性增长再到非线性增长直至最终破碎为湍流的过程.Mack[2,3]在来流扰动为小扰动的条件下,基于线性稳定性理论对高超声速条件下边界层进行了大量理论和数值分析,研究发现当马赫数大于4时,边界层发展规律相对于超声速条件下的发展规律呈现出明显的差别,此时边界层中出现了以第二模态为主的频率更高的扰动波模态,且这些扰动波成为边界层转捩过程中的关键因素.后来,Malik[4],Demetriades[5],Kendall[6]以及Stetson和Kimmel[7]进行的一系列数值和实验研究都证明了高超声速边界层转捩过程中第二模态波的主导作用.
在边界层的自然转捩过程中,自由来流中扰动穿过飞行器前缘激波并在边界层中激发初始扰动波的感受性过程作为整个边界层发展的最初阶段,它直接决定了边界层中的初始扰动,进而对边界层中后续所有扰动波的发展产生影响.感受性问题主要研究外界扰动对边界层内扰动波的影响,前期已有许多相关的边界层稳定性研究.Haddad和Corke[8]通过数值模拟研究平板头部钝度和攻角对感受性过程的影响,认为感受性随着头部钝度减小而增强,尖平板最为明显,同时,攻角越大,边界层中扰动受到自由来流扰动的影响就会越大.Zhong等[9,10]在高超声速感受性方面做了大量的数值研究,通过在平板和圆锥模型中引入流向速度扰动、温度扰动以及在壁面添加吹吸扰动和粗糙元的方式,系统地研究了不同来流条件下的边界层感受性过程.Balakumar等[11,12]通过数值模拟的方式研究圆锥边界层感受性系数,并且结合自由来流的能谱对边界层转捩进行预测,对于钝锥而言,预测结果误差为20%左右.国内方面,天津大学在边界层流动稳定性方面做了大量研究工作,Cao和Zhou[13]通过在流场入口处添加不同幅值的第二模态Tollmien-Schlichting(T-S)波,对边界层中扰动演化过程进行了数值模拟,分析了流场中产生的小激波对边界层发展的影响.陆昌根和沈露予[14]主要对自由来流湍流对边界层内初始扰动的影响进行了感受性研究,通过分析二者之间的色散关系和增长率等,证明边界层中被激发的小扰动就是T-S波.Zhang等[15]对高超声速钝锥边界层的感受性进行了数值分析,结果表明在各种来流扰动的条件下,钝锥边界层感受到的主要是声波扰动;钝锥边界层内扰动模态在头部附近是第一模态,向下游依次转换为第二模态、第三模态.在相关的实验研究方面,Kendall[16,17]是最早对边界层感受性开展实验研究的学者之一,他认为来流中的声波扰动在边界层感受性过程中起主要作用,且随着马赫数的增大,其对边界层中初始扰动产生的影响更大.Maslov等[18]在高超声速条件下进行了较为经典的感受性实验研究,通过辉光放电装置在自由来流中引入三维和二维扰动,研究了扰动影响条件下的平板边界层中扰动发展规律,测量了不同扰动强度下的感受性系数,并且认为扰动辐射波的倾斜角度对感受性系数影响较大.除此之外,Schmisseur等[19]主要对激光聚焦引起的扰动的空间影响范围进行了定量研究,并用热线测量的方式研究了激光聚焦扰动对边界层的影响,发现在边界层外缘附近位置,激光聚焦扰动的影响效果最为明显.而Chou等[20]则主要研究了不同钝度的圆锥表面边界层在激光聚焦扰动影响下,其流动失稳时第二模态波特征频率范围内的压力信号的脉动量与圆锥表面压力值之间的定量关系.而扰动波幅值放大率作为边界层稳定性研究中的关键因素,本文则主要对不同频率的扰动波的幅值放大率进行分析,并且对比了不同激光聚焦位置对边界层中扰动波发展过程的影响.
高超声速边界层相关的实验研究主要可以分为转捩实验和稳定性实验两大类,其中转捩实验主要是研究边界层转捩位置受雷诺数、攻角和钝度等参数的影响.而稳定性实验主要是研究边界层破碎之前其中扰动波的发展规律,稳定性实验研究对设备和测试技术的要求更高.首先,为了使边界层按照自然转捩的方式发展,并且让边界层中扰动波以适中的速度增长,需要自由来流湍流度足够小的低噪声风洞;另一方面,为了对高超声速边界层中的100 kHz量级的高频扰动波进行有效测量,需要频响更高的压力传感器和带宽更大的数据采集系统.稳定性实验研究有助于更深刻地反映边界层转捩过程中的物理机理,同时为数值模拟结果的验证提供更多的定量信息.前期的实验中,已经通过流动显示和壁面脉动压力对高超声速边界层中的第二模态扰动波发展过程进行了相应的研究[21].为了进一步研究外界扰动对边界层中扰动波的作用机理,总结边界层中扰动波在不同外界扰动影响下的发展规律,在深入理解感受性过程物理机理的同时,也为高超声速边界层感受性数值研究提供相应的实验支撑,本文对激光聚焦扰动影响下的高超声速圆锥边界层开展了稳定性实验研究.首先对激光扰动进行了定量研究,分析了激光聚焦扰动的时频特性;然后通过改变激光聚焦位置,将激光分别聚焦于圆锥前方自由来流和圆锥壁面X=100 mm位置,研究了扰动作用下边界层中第二模态波的特征频率以及出现位置的变化情况,并对不同频率成分的幅值增长情况进行对比讨论分析.
2 实验设备
2.1 风洞设备

图1 高超声速低噪声风洞示意图Fig.1.Hypersonic low noise wind tunnel.
实验在图1所示的马赫6低噪声风洞中进行.风洞实验段横截面尺寸为260 mm×260 mm,风洞单次运行有效时间超过30 s.前期许多学者的研究已经证实了风洞自由来流噪声对边界层转捩结果会产生较大影响[22,23],该风洞通过在稳定段设计安装多孔倒锥、消音夹层和阻尼网等整流装置,有效地抑制了风洞来流噪声.针对该风洞用Kulite XCE-062型高频传感器以皮托管的测量方式,传感器正对着风洞自由来流,从而测量得到传感器头部激波的波后总压,并用该压力的均方根值除以平均压力得到的值作为衡量风洞来流品质的标准,即风洞的湍流度.在喷管出口横截面中心处对风洞来流品质进行定量标定,结果显示在单位雷诺数(2—4)×106/m范围内,风洞湍流度约为千分之四,和常规风洞的至少1%量级的湍流度相比,噪声水平有了明显的降低[24].
2.2 圆锥模型
圆锥边界层是典型的三维边界层流动模型,本文在半锥角7◦的直圆锥上开展边界层稳定性实验研究.实验模型如图2所示,圆锥总长为536 mm,底部直径为132 mm.以圆锥母线方向为X坐标,在X方向上共布置7个压力测点,①—⑦号测点具体位置分别为:X1=140 mm,X2=200 mm,X3=260 mm,X4=320 mm,X5=380 mm,X6=440 mm,X7=500 mm.壁面压力测量采用PCB132A31型高频压力传感器,该传感器的固有频率达到1 MHz以上,最小压力分辨率为7 Pa,传感器的灵敏度约为23 mV/kPa.PCB132A31型传感器具有高通滤波的特性,能对频率在11 kHz以上的信号进行有效测量.用DH5960超动态信号处理分析系统对脉动压力信号进行采集.该数据采集系统最高连续采样频率为1 MHz,瞬态采样频率最高达到20 MHz.在圆锥边界层脉动压力实验中采用瞬态采样模式,采样频率为5 MHz.
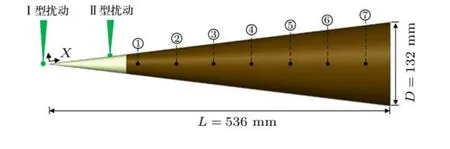
图2 直圆锥示意图Fig.2.Schematic of the straight cone.
2.3 激光扰动
边界层稳定性研究中的外界扰动按照添加方式可以分为自然扰动和人工扰动.而在相关实验研究中,一般通过辉光放电、狭缝射流或者振动带等方式在流场中加入人工扰动.稳定性实验中添加的扰动需要满足可重复、易控制条件,且扰动需要为小扰动,例如粗糙带等引入的扰动很可能会直接导致边界层旁路转捩,边界层经过粗糙带之后直接转捩到湍流状态,该条件下就不利于测量分析边界层中扰动波的发展过程.本文采用的激光聚焦扰动由Nd:YAG脉冲激光光源产生,激光波长532 nm,出光频率5 Hz,单脉冲脉宽为6 ns,最高能量350 mJ.激光束经过透镜组后聚焦于流场中的特定位置,高能激光通过作用于局部空间中的气溶胶粒子从而引发击穿产生等离子体,被迅速加热的等离子体会立刻产生一个膨胀的冲击波扰动.如图2所示,通过改变激光聚焦位置,在流场中引入两种不同类型的扰动,其中I型扰动是将扰动直接添加到圆锥上游的自由来流中,激光聚焦位置位于圆锥尖端正上游3 mm的位置处;II型扰动是直接在边界层中加入扰动,即将激光聚焦在X=100 mm的圆锥壁面位置.图3给出了常温常压条件下添加两种扰动时的纹影结果,可以看出由于激光聚焦而导致空气被击穿的效果明显,局部空间内流场密度变化较大.

图3 激光聚焦扰动纹影图(P=1.01×105Pa,T=300 K,ρ=1.29 kg/m3) (a)I型扰动;(b)II型扰动Fig.3.Schlieren results of the laser-generated perturbation(P=1.01×105Pa,T=300 K,ρ=1.29 kg/m3):(a)Perturbation I;(b)perturbation II.
3 实验结果与分析
3.1 激光聚焦扰动时频特性分析
3.1.1 常温常压条件下激光聚焦扰动时频特性分析
由于当风洞运行时,圆锥壁面传感器测量得到的脉动压力信号一方面包含了激光聚焦带来的影响,另一方面也包含了边界层中处于不断演化过程之中的扰动波的影响.为了定量研究激光聚焦引起的扰动的时频特性,首先在风洞不运行且常温常压条件下对激光聚焦扰动进行分析.图4分别为添加两种扰动时测量得到的压力信号时序图.图中结果表明,在常温常压条件下,激光聚焦扰动会引起流场中压力发生明显的变化.通过对比七个测点的压力变化幅值可以明显看到随着扰动向下游的传播,其压力脉动幅值逐渐减小,说明压力扰动在传播过程中能量被逐渐耗散.同时,由于II型扰动激光聚焦位置更靠近传感器,所以当流场中添加II型扰动时,相同位置处的传感器测量得到的压力脉动幅值量明显更大,这种现象在第一个测点位置即X=140 mm处最为明显.通过分析压力扰动传播到各个传感器之间的时间差,可以计算出两种扰动向下游传播的速度,分别为348.8 m/s和345.5 m/s,由于两种扰动除了在流场中的位置不同之外,流场中密度、压强等参数基本相同,所以两种扰动在传播速度方面并没有明显的差异.
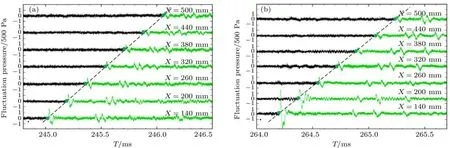
图4 脉动压力时序图(P=1.01×105Pa,T=300 K,ρ=1.29 kg/m3) (a)I型扰动;(b)II型扰动Fig.4.Time traces of fluctuation pressure(P=1.01×105Pa,T=300 K,ρ=1.29 kg/m3):(a)Perturbation I;(b)perturbation II.
图4所示压力信号时序结果反映了压力值大小随着时间的变化.为了进一步研究压力信号中频域成分随时间的变化,将图4中对应的压力信号分别进行短时傅里叶变换(short time Fourier transformation,STFT).STFT是最常用的一种时频分析方法,它通过对信号加滑动时间窗,然后对窗内信号做傅里叶变换,最终得到信号的时变频谱.其中时间窗的长度决定频谱图的时间分辨率和频率分辨率,且二者不可兼得,即若要提高信号的时间分辨率则要以牺牲频率分辨率为代价.由于高频响、高压力分辨率的PCB压力传感器能够灵敏分辨捕捉到压力突变的时刻,因此本文中的STFT分析以频率分辨率为主,最终计算得到的STFT结果的时间分辨率为0.8 ms,频率分辨率为1.22 kHz.图5给出了在X=140,320和500 mm三个位置处分别添加两种扰动时的STFT结果,每张图都反映了压力信号中的频域成分在76 ms内随时间的变化情况.结果表明激光聚焦于流场中的局部空间位置时,扰动不仅会引起图4所示的压力绝对值大小的脉动变化,其压力信号中的频域成分同样会发生突变,不同频率信号的能量重新分布,相比于不添加激光聚焦扰动时,10—20 kHz范围内的信号成分能量大幅度增加.在靠近扰动源头的位置处,即X=140 mm时,存在更高频率的扰动成分,其频率大约在40—60 kHz.随着扰动向下游的传播,该范围内的扰动迅速衰减,与此同时10—20 kHz范围内的信号在向下游传播的过程中能量逐渐增加,说明激光聚焦引起的压力信号中频率成分在向下游传播过程中逐渐向低频转换.从两种扰动结果对比来看,当激光聚焦位置位于自由来流中时,即在流场中加入I型扰动时,10—20 kHz这个主频范围内的信号能量更强,且扰动对流场的影响时间更长,持续约60 ms.

图5 脉动压力STFT结果(P=1.01×105Pa,T=300 K,ρ=1.29 kg/m3) (a)I型扰动;(b)II型扰动Fig.5.STFT results of fluctuation pressure(P=1.01×105Pa,T=300 K,ρ=1.29 kg/m3):(a)Perturbation I;(b)perturbation II.
3.1.2 风洞运行时激光聚焦扰动时频特性分析
本研究中风洞运行马赫数为6,总压P0=0.3 MPa,总温T0=450 K.单位雷诺数Reu=ρU/µ,其中ρ,U和µ分别表示空气的密度、速度和黏性系数.根据本文中的马赫数以及总温总压条件可以计算得到单位雷诺数为3.1×106/m.当风洞运行时,流经实验段的气流速度约890 m/s,主流流场密度ρ∞≈0.012 kg/m3,在这样的低密度且高速运动的流场中,空气的击穿阈值大幅增加,激光聚焦击穿效果不明显,该条件下纹影不能够精确捕捉到流场中由于激光聚焦带来的扰动,而PCB压力传感器由于具有高频响和高压力分辨率的特性,因此可以用来测量当地流场中细微的压力脉动变化.图6给出了风洞运行时在流场中加入II型扰动后测量得到的压力信号时序结果.对比图4(b)结果可以看到,当风洞运行时,由于流场速度大,密度和压力较小,激光聚焦扰动引起的压力变化幅值同样减小.同时通过分析扰动传播到各个测点的时间差计算得到此时扰动的传播速度为1008 m/s,远大于风洞不运行且常温常压条件下扰动的传播速度.

图6 脉动压力时序结果(P0=0.3 MPa,T0=450 K,Reu=3.1×106/m,II型扰动)Fig.6.Time traces of fluctuation pressure(P0=0.3 MPa,T0=450 K,Reu=3.1×106/m,perturbation II).
由于在流场中加入的激光扰动频率都为5 Hz,扰动之间间隔为200 ms,因此通过对长度290 ms的数据进行STFT分析,可以确保在分析数据中包含了激光扰动的结果.图7给出了风洞运行时在X=140,500 mm两个位置处的压力信号的STFT分析结果.对于X=140 mm位置处的测点而言,由于更靠扰动源,激光聚焦扰动衰减较小,且此位置处的边界层还处于发展的初始阶段,边界层中也没有出现第二模态扰动波等结构,因此可以在STFT结果中清晰地判断出激光聚焦扰动传播到达传感器位置的时刻.随着扰动向下游传播,在X=500 mm位置处,边界层中出现了第二模态扰动波,第二模态波特征频率附近的信号能量占据了绝对的主导地位,此时由于激光聚焦扰动而引起的较小的频域变化被淹没在其中,因此不能在STFT结果中明显地分辨出外界扰动的影响.同时,当激光聚焦位置不相同时,测量得到的压力信号的STFT结果也表现出一定的差异.由于II型扰动相对于I型扰动其激光的聚焦位置更靠近下游传感器所在位置,因此在X=140 mm位置处测量得到的压力信号中,由II型扰动引起的压力信号中频域成分的突变更为明显.而在X=500 mm位置处,加入I型扰动时测量得到的第二模态波频率范围约为60—80 kHz,而当流场中加入的是II型扰动时,该位置处测量得到第二模态波的特征频率相对更高,约在85—105 kHz的范围内.关于扰动波特征频率和幅值特性将在下面进一步讨论.

图7 脉动压力数据STFT结果(P0=0.3 MPa,T0=450 K,Reu=3.1×106/m) (a)I型扰动;(b)II型扰动Fig.7. STFT results of fluctuation pressure(P0=0.3 MPa,T0=450 K,Reu=3.1×106/m):(a)Perturbation I;(b)perturbation II.
3.2 边界层中扰动波特征频率影响分析
对高超声速边界层中第二模态波幅值和特征频率进行定量分析,需要对压力信号进行功率谱(power spectrum density,PSD)分析.本文中的PSD均采用Welch方法计算得到.Welch方法通过对数据分段和加窗,有效降低了谱估计的方差,同时使PSD结果具有足够的频率分辨率,是一种有效的PSD估计方法.从图5的STFT结果得出流场静止时扰动对流场的影响时间约为60 ms,扰动传播速度约为347 m/s.而当风洞运行时,扰动传播速度大幅度增加,约为1008 m/s,导致扰动对流场的影响时间可能会大幅度缩短.为了分析激光聚焦扰动对边界层中扰动波发展的影响,对激光扰动到达传感器位置时刻之后的15 ms内的压力数据进行PSD分析.在PSD计算的过程中,帧长度和窗函数长度的选取直接影响PSD的频率分辨率,本文PSD计算过程中选取的数据帧长度取为409.6µs,每次运算采用长度为2048的Blackman窗函数,数据重复率为80%,每个PSD取179个快速傅里叶变换计算结果的平均值,最终得到的PSD的频率分辨率为2.44 kHz.本文研究中,通过上述参数计算得到的PSD基本上满足频率分辨率要求,并且通过统计平均计算减小了PSD估计的方差,PSD结果能够有效反映信号的频域分布.
图8给出了由圆锥壁面脉动压力计算得到的PSD.其中图8(a)为不添加激光聚焦扰动时的结果,结果显示在X=440和500 mm位置处出现了第二模态扰动波,且第二模态波在向下游的传播过程中幅值大幅度增加,而模态波的特征频率fc变化较小,分别为92和87 kHz.当加入I型激光聚焦扰动时,结果如图8(b)所示,此时边界层中扰动波的发展呈现出不同的规律,在X=380,440和500 mm都观察到了明显的第二模态波,且相比于不添加激光扰动时,边界层中第二模态波在从X=380 mm位置发展到X=500 mm位置的过程中,其幅值增长更为明显,第二模态特征频率fc从98 kHz下降到了70 kHz.根据Mack[2,3]的研究发现,第二模态波的波长约为当地边界层厚度的两倍,而当边界层为层流状态时,随着边界层向下游发展,边界层厚度也同样处于一个增长的过程之中,导致第二模态波的波长随着增加,其特征频率在向下游传播的过程中自然会减小,实验中测量到的第二模态波的特征频率变化规律和Mack的理论分析结论一致.此外,还在X=500 mm位置处还观察到频率为141 kHz的高频谐波成分,证明此时在此位置处,扰动已经开始出现非线性增长[25].当激光聚焦位置向下游移动,直接聚焦在圆锥壁面X=100 mm位置,即在流场中加入II型扰动时,外来扰动对边界层的影响作用依然十分明显,其中第二模态波幅值相比不添加扰动时依然呈现出大幅度的增长,但此时在X=500 mm位置处没有观察到高频谐波成分,证明此时边界层中扰动波的发展还没有进入到非线性发展阶段.添加II型扰动之后,边界层中测量得到的第二扰动波的特征频率值大幅度增加,在X=380,440,500 mm三个位置处测量得到的第二模态波特征频率分别为116,100,89 kHz,相比于添加I型扰动的结果,每个对应位置处测量得到的第二模态的特征频率都增加了约20 kHz.
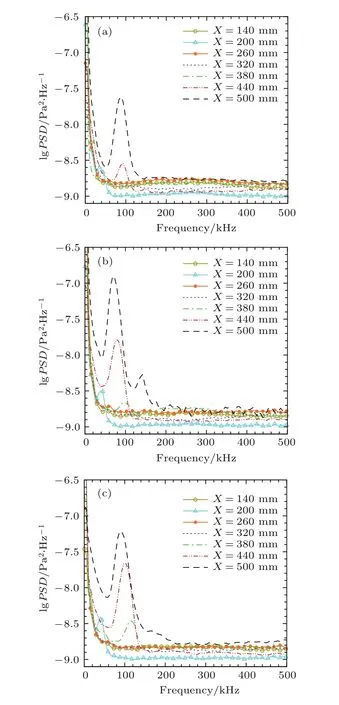
图8 不同工况下的PSD结果 (a)不添加激光聚焦扰动;(b)I型扰动;(c)II型扰动Fig.8.PSD results under different conditions:(a)No laser-generated perturbation;(b)perturbation I;(c)perturbation II.
图9将X=380,440,500 mm三个位置处在不添加激光聚焦扰动和分别添加两种扰动情况下的PSD结果进行了对比.不添加激光扰动情况下,在X=380 mm位置处基本没有明显的模态波产生,当流场中加入激光扰动后,扰动波的产生提前,在该位置处都出现了第二模态波,从此也可以看出激光聚焦扰动对边界层中扰动波的发展起到了促进作用,且当流场中加入II型扰动时第二模态波的幅值更大,并且模态波的特征频率更大.当扰动发展到X=440 mm位置处时,三种条件下都观察到了明显的第二模态波,此时添加II型扰动的幅值依然比I型扰动条件下得到的第二模态波的幅值大,且频率更高.随着边界层向下游发展,在X=500 mm位置处,三种条件下得到的第二模态波的幅值都比较大,此时添加I型扰动情况下得到的第二模态波幅值更大,且出现了高频谐波成分,边界层中扰动波发展开始进入到非线性发展阶段.图9中三个位置处的结果表明:直接在边界层中加入激光聚焦引起扰动时,会使得边界层中出现的第二模态波的初始幅值更大,但是在扰动波之后的发展过程中,其增长速度较添加I型扰动时更慢,说明在自由来流中加入的扰动对整个边界层中扰动波发展的促进作用更加明显.

图9 不同位置处PSD结果对比 (a)X=380 mm;(b)X=440 mm;(c)X=500 mmFig.9. PSD results at different locations:(a)X=380 mm;(b)X=440 mm;(c)X=500 mm.
3.3 扰动波幅值增长特性分析
边界层中各个频率的扰动波在向下游传播的过程中会逐渐被放大,扰动波的幅值会随之增长,而幅值最先增长到临界幅值的频率成分通常被认为在边界层转捩过程中起到主导作用,研究边界层中幅值增长最快的扰动波特征频率以及相应的幅值放大倍数,是边界层稳定性研究的重要内容.目前应用较为广泛的e-N转捩预测方法也正是基于线性稳定性理论计算出各频率扰动波在不同位置处的放大倍数N值,从而根据N值的大小对转捩的触发位置进行预测.e-N方法也被波音公司Cebeci等[26]和Crouch等[27]认为是目前最为有效的转捩预测方法.e-N转捩预测方法中的N值定义公式为

式中A表示扰动幅值,而A0为扰动的初始幅值.对于e-N方法而言,扰动的初始幅值A0是非常关键的参数.关于初始幅值A0,目前比较通用的方法是取中性位置处的扰动作为初始扰动.而在实际流动中,初始幅值A0的确定需要考虑到边界层中初始扰动的感受性问题,即自由来流中扰动的幅值与边界层中的初始扰动幅值之间的对应关系,而这些都是目前基于线性稳定性理论的e-N方法没有充分考虑到的因素,因此这也成为影响e-N预测效果的关键因素之一.通过实验测试手段对边界层中初始扰动进行定量测量和研究依然比较困难,因为边界层中扰动产生的初始位置不确定且初始扰动受到来流湍流度等诸多因素的影响,无法通过在壁面布置传感器的方式对其进行有效测量.为了研究激光聚焦扰动影响下的边界层中扰动波的幅值发展过程,对于特定频率的扰动波,在初始扰动A0无法确定的前提下,选取第一个测点位置(X=140 mm)处的扰动波幅值A1作为本文中的基准扰动幅值,其他位置处的扰动波幅值通过A1进行归一化处理,如下式所示:


图10 三种工况下幅值放大率结果 (a)不添加激光聚焦扰动;(b)I型扰动;(c)II型扰动Fig.10.Amplification of the disturbance under different conditions:(a)No laser-generated perturbation;(b)perturbation I;(c)perturbation II.
这样得到的幅值放大率N1与e-N方法中的放大率N值之间相差固定值ln(A1/A0),通过N1随着流向位置发展而变化的规律,同样可以反映边界层中特定频率扰动波的增长过程.
图10给出了不添加激光聚焦扰动和分别加入I型、II型扰动时得到的扰动波幅值增长率结果.本文研究中以测量得到的第二模态扰动波的特征频率fc为中心,选取40 kHz的带宽并对其中各个频率的扰动波幅值放大率N1进行计算,幅值增长最快的扰动波的频率fmax以及相应的最大放大率N1列于表1.当流场中不添加激光聚焦扰动时,如图10(a)所示,各个频率成分基本上都是从X=380 mm位置开始出现增长,并且在X=440 mm以后增长速度明显加快.其中频率为90 kHz的信号幅值增长速度最快,对于该频率的扰动波而言,在X=500 mm位置处,其扰动波幅值放大倍数N1=2.96.当在来流环境中加入I型扰动时,频率为73 kHz的频率成分增长速度最快,扰动波幅值最大放大倍数N1=4.52倍,此时随着扰动波频率增加,扰动幅值增长速率有所减慢.当在流场中加入II型扰动时,如图10(c)所示,特征频率为90 kHz的扰动波的幅值增长最快,扰动波幅值最大放大倍数N1=3.81倍.同时在上述三种条件下,都会在X=200 mm观察到扰动波增长速度减小的现象,从图8所示的PSD可以看到该位置处都出现30—40 kHz的能量峰值,该频率成分与边界层中可能产生的第一模态扰动相关.由于在X=200 mm位置处的压力信号中主要的能量都分布在30—40 kHz范围内,因此对于本文关注的第二模态波特征频率范围内的扰动波而言,其幅值在X=200 mm位置处出现了微弱的降低.
图11给出了四种频率扰动波在不同运行条件下的幅值增长率的比较.可以看到,在流场中加入扰动对扰动波的增长起到了明显的作用,整体而言,会促进扰动的发展,扰动波幅值的增长速度大幅度增加.同时,对于频率不同的扰动成分,不同类型的激光聚焦扰动对其的影响不同.对于80 kHz的扰动波而言,在流场中加入I型扰动时,其增长速度更快.而随着频率的继续增加,I型扰动对扰动波幅值增长速度的影响效果逐渐减小,对110 kHz的频率波而言,加入I型扰动后的幅值增长率和不加扰动条件下得到的结果基本一致.而当在流场中加入II型扰动时,边界层中受到激光聚焦扰动影响的扰动波的频率范围更广,特别是对于边界层中100和110 kHz的扰动波而言,此时I型扰动对边界层中扰动波增长速度影响较小,但是加入的II型扰动使边界层中扰动波的增长速度一直保持在一个相对较高的水平,随着频率的增加,在440—500 mm范围内,扰动的幅值增长开始变缓慢,对于110 kHz的扰动波而言,在440—500 mm流向范围内其幅值基本维持在一个相对恒定的水平.

表1 幅值放大率N1结果Table 1.Results of disturbance amplification N1.

图11 不同频率幅值放大率 (a)f=81 kHz;(b)f=90 kHz;(c)f=100 kHz;(d)f=110 kHzFig.11.Amplification of the disturbance with different characteristic frequency:(a)f=81 kHz;(b)f=90 kHz;(c)f=100 kHz;(d)f=110 kHz.
4 结 论
本文主要研究了激光聚焦扰动对直圆锥边界层中扰动波发展的影响.通过对比分析不添加激光聚焦扰动以及在流场中不同位置处添加激光聚焦时测量得到的脉动压力数据结果,主要得到了以下结论.
1)激光聚焦扰动对流场会产生明显的影响,在静止的常温常压环境中,激光聚焦引起的扰动在流场中的传播速度约为347 m/s,扰动会引起压力信号的频域成分发生变化,其中10—20 kHz范围内的能量成分大幅度增加.激光聚焦引起的扰动的持续作用时间约为60 ms.而当风洞运行时,扰动在流场中传播的速度约为1008 m/s.
2)激光聚焦扰动对圆锥边界层中扰动波的发展起到促进作用,第二模态出现的位置大幅度提前.相比不添加激光聚焦扰动条件下得到的结果,当激光聚焦位置位于圆锥前方自由来流中时,测量得到的第二模态的特征频率明显减小.而当流场中加入的是II型扰动,即激光聚焦位置位于圆锥壁面X=100 mm位置时,得到的第二模态特征频率更大,相比于添加I型扰动的结果,每个对应位置处测量得到的第二模态的特征频率都增加了约20 kHz.
3)当流场中加入II型激光聚焦扰动时,边界层中出现的第二模态波的初始幅值更大,但是幅值增长的速度相对加入I型扰动时的结果而言要小一些,流场中加入I型扰动时,在X=500 mm位置测量得到了高频谐波,边界层发展进入到了非线性阶段,当聚焦扰动位于圆锥前方自由来流,对圆锥边界层中的扰动促进作用更加明显,圆锥边界层中扰动发展更快.
4)流场中加入激光扰动后,边界层中扰动波幅值增长速度明显加快.在圆锥X=140—500 mm的范围内,当流场中加入I型扰动时,频率为73 kHz的扰动波增长速度最快,扰动波幅值放大4.52倍.而当流场中加入II型扰动时,扰动幅值增长最大为3.81倍,对应的扰动波的频率为90 kHz.由此再次证明聚焦扰动位于自由来流时对边界层影响更大.
