基于卷积神经网络的永磁同步电机转矩观测器
2018-11-29李涉川孙天夫梁嘉宁
李涉川 孙天夫 黄 新 梁嘉宁
1(桂林电子科技大学 桂林 541004)
2(中国科学院深圳先进技术研究院 深圳 518055)
1 引 言
内置式永磁同步电机(Internal Permanent Magnet Synchronous Motor,IPMSM)具有效率高、功率密度高、恒功率工作范围宽等优点[1]。在转矩控制系统中,电机的实际运转速度由主控系统决定[2],其实现过程步骤如下:(1)通过磁链观测器进行观测并测量电机的定子磁链;(2)根据所观察并测量的定子磁链估算电机转矩;(3)确定定子磁链所在扇区;(4)比较电机磁链与转矩的实际值与给定值,并通过磁链与转矩调节器获取输出结果;(5)根据定子磁链扇区信号选取空间电压矢量,在确保定子磁链幅值不变的基础上控制转矩角的变化,从而达到对电机转矩直接控制的目的[3]。综上所述,精确的转矩预测对于转矩控制的永磁电机系统尤为重要。电压模型是观测转矩的基本方法,其优点是算法简单,对永磁同步电机参数依赖小。但利用理想积分器观测磁链时,定子电流与定子电压的测量误差在估算磁链结果中会引起直流偏移[4]。为了克服直流偏移问题,朱儒等[5]采用低通滤波器替代理想积分器,但出现了稳定误差,同时需要调节门槛值,比较繁琐;其他研究人员[6-9]采用了改进的低通滤波器法,虽然消除了稳态误差,但动态性能较差:当电压信号频率发生突变时,转矩估算会出现较大误差。电流转速模型需要准确的电机电感和转子位置角,但这些参数难于获取,而这必然影响电流控制转速模型的准确性与实际应用。
传统的转矩控制系统应用于内嵌式永磁同步电机存在一定的缺陷。这是因为在通过电压法计算得到的定子磁链中,电阻受温度变化的影响,积分器具有误差积累,纯积分器也存在漂移等现象。因此,在电机低速运转时,传统的电压型磁链观测模型对定子磁链的控制和估算都不精确,严重制约定子磁链和电磁转矩的控制效果,直接使转矩控制系统低速控制性能受到制约,进而控制性能也会受到影响。
为了进一步提高定子磁链与转矩的观测精度,许多学者开始将智能控制理论应用于定子磁链观测中。研究人员[10-12]采用模型参考自适应方法来估算定子磁链,但参考模型估算磁链的准确性有待提高;沈蕾等[13]采用卡尔曼滤波器观测定子磁链,该方法观测到的电机定子磁链较准确,但算法复杂、模型需要大量计算、对系统硬件性能要求高,而且确定合适的系统噪声协方差矩阵、测量噪声协方差矩阵等较困难。
分析永磁同步电机是一个复杂的综合电气设备,其内部包含多个子系统,可以通过监测与电机状态相关的电流、电压和振动信号等参数,并利用特征提取、信息融合和模式识别等方法来完成电机转矩的预测。近年来随着机器学习的发展,涌现出一些优秀的深度学习的算法,如多层神经网络、卷积神经网络和循环神经网络等。这些算法基于人工神经网络的原理,首先把过程黑箱化,内部实现特征提取等;然后,对观测到的信息进行更深层的处理与特征分析,提取到关键特征;最后,进行预测与分类数据[14]。石王壮等[15]基于浅层神经网络提出了一种转矩观测器。该转矩观测器采用的浅层神经网络有三层,即输入层、隐藏层和输出层。其中,输入层、隐藏层和输出层的神经元数目依次是 4、20 和 4,并且通过权重将偏差耦合到隐藏层。该转矩观测器通过反向传播算法、估计的d轴和q轴磁链、测得的d轴和q轴电流以及由此产生的输出转矩进行训练。与基于数学模型的转矩观测器相比,转矩观测器的实现相对简单,因为它与电机数学模型和机器参数无关。然而,实验发现其基于浅层神经网络的转矩观测器测量的转矩具有明显的谐波波纹,这会使转矩观察性能恶化,影响实际控制系统中的应用。
为了提高基于人工神经网络的转矩观测器的观测精度,本文提出了一种基于卷积神经网络(Convolutional Neural Network,CNN)的转矩观测器。通过仿真验证所提出的转矩观测器,并与传统的基于浅神经网络的转矩观测器进行比较发现,该转矩观测器可以获得更高的转矩观测精度。同时,通过建模仿真以验证在 IPMSM 驱动器的转矩控制回路中的 CNN 转矩观测器性能。仿真结果表明,所提出的转矩观测器的 IPMSM控制方案可以在恒定状态和瞬态状态下实现令人满意的转矩性能。
2 内嵌式永磁同步电机数学模型
为了简化对内嵌式永磁同步电机的控制,电机的数学模型建立在d-q坐标系中。内嵌式永磁同步电机在d-q坐标系中的数学模型[16]如下所示:

其中,vd、vq为d轴和q轴电压;id、iq为d轴和q轴电流;Ld、Lq为d轴和q轴电感;为永磁体磁链;R为定子绕组电阻;w为电机转速;P为电机磁极对数;Te为电机的输出转矩。根据公式(1)和(2)可知,电机d-q轴的电压由d-q轴的电流决定。因此,一般通过控制电机的d-q轴电流来控制电机。同时,根据公式(3)可知,可以有多种电流组合产生同样的转矩。因此,Te存在一个id、iq组合的优化值,使电机的效率最高。
3 基于卷积神经网络的转矩观测器模型
卷积神经网络是深度学习中的重要分支,常用于识别图片、汽车传感器、语音和股票等矩阵型大数据。与传统的浅层神经网络相比,卷积神经网络充分考虑了数据矩阵的动态特性和位置信息,通过编码对网络中神经元的权重和偏置的学习,使神经网络自适应学习数据的特征,能够更好地处理大数据[17]。此外,卷积神经网络非常适合用于处理和学习海量数据,如大规模图像处理。该网络主要包括卷积层、激活层、池化层和完整连接层。经典卷积神经网络的结构如图 1 所示[18]。
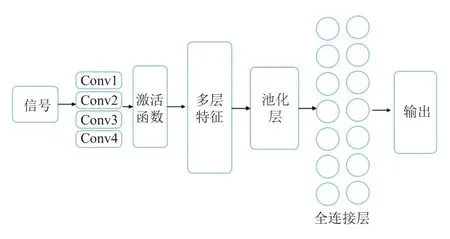
图1 CNN 网络结构Fig. 1 The network structure of the CNN
如图 1 所示,传统的 CNN 网络主要用于处理三维信息,如图像等。由于本文中的电机d轴和q轴电流是一维的,故 CNN 的结构应该有所改变。在本文中,用一维卷积核代替二维卷积核。其中,一维卷积核在最新的卷积神经网络中广泛被使用[19],其有两点作用:(1)可以处理一维的数据向量;(2)可以实现对一维数据向量特征提取与融合,实现多个特征映射(feature map)的融合[19]。特征向量[id,iq]可以通过一维卷积核来进行特征分析。以下等式为处理输入信号通过卷积核:

其中,s(t)为时间t的输入信号,由id和iq组成;A为N×N线性混合滤波器矩阵,具有k个节点的两个可调参数wk和bk;wk为第k个卷积核的权重;bk为第k个卷积核的偏差。如果使用多个卷积核,那么神经网络将提取s(t)的各种特征。
本文中,激活函数用于提高卷积核输出的非线性映射。而在 CNN 中,通常采用 Relu 函数作为激活函数[20]。Relu 功能如下:

当输入信息在卷积层之后形成特征映射时,该映射的信息计算如下:

其中,hk是特征映射,特征映射的维数是 2·k。卷积核和激活函数通常组合为卷积层,特征图的网络拓扑如图 2 所示。
在卷积层处理输入信号之后,特征图的维度可能仍然很大。因此,需要池化层。在本文中,网络池层采用 Max Pooling 结构,并且池化层输出后进一步输入到完全连接层,以重新匹配该特征。
根据 IPMSM 电机数学模型(电机参数见表1) 及公式(3)可知,当电机参数中的磁链和电感为确定值时,转矩由唯一的id、iq对应输出,并提取在电机模型中的Te、id、iq作为数据集合。本次实验共采取了 60 000 组数据,并把数据集分成测试集、训练集和交叉验证集。其中,训练集用来训练 CNN 神经网络;交叉验证集用来监视CNN 网络的泛化能力;测试集用来检测 CNN 网络预测Te的准确程度与实际应用中的效果。
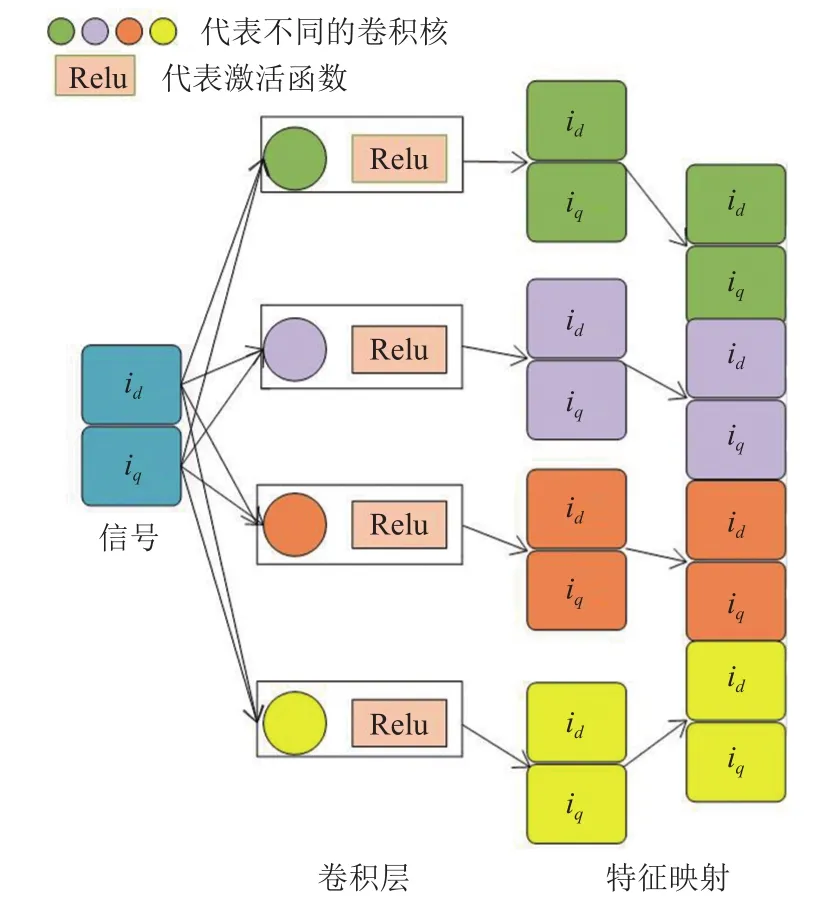
图2 CNN 特征图的结构Fig. 2 The structure of the CNN feature map

表1 仿真模型的参数Table 1 Simulation model parameters
由公式(3)可知,可以通过id、iq来确定电机的转矩,并可以通过 CNN 算法建立关于Te的非线性拟合。CNN 的输入为id和iq,输出为Te。因此,选择id和iq作为网络的输入,并且网络的输出是观察到的转矩。根据经验公式(8)计算完全连接层的每个隐藏层中的神经元数量。因此,本文采用的神经网络结构为 2 输入、1 输出的三层网络,隐藏层的神经元个数计算为:

其中,n、m分别为输入层和输出层的神经元的个数;a为 1~10 内的整数。
通过公式(8),可以计算隐藏层数的范围。通过测试不同拓扑结构的网络,确定网络的最佳结构,即完全连接网络中的神经元数量为 20。本文中基于 CNN 的转矩观测器的结构拓扑如图 3所示。
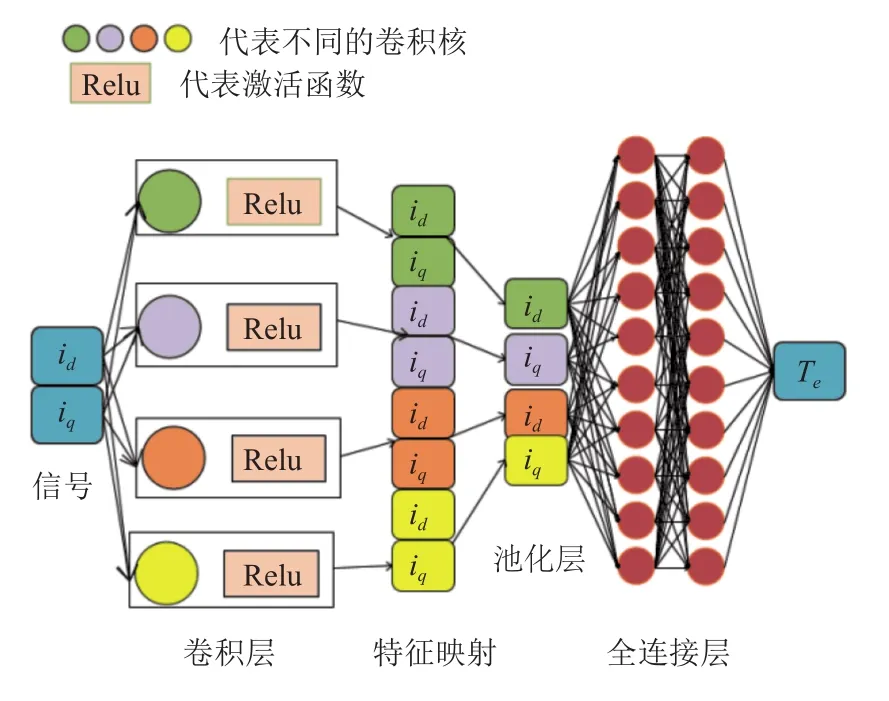
图3 CNN 转矩观测器结构Fig. 3 The structure of the CNN torque observer
公式(9)为所建立的 CNN 网络的损失函数。通过损失函数可以定义网络模型的优化效果和优化目标。其中,优化过程可以分为两个阶段,第一阶段先通过神经网络前向传播算法计算得到预测值,并将预测值和真实值进行对比得出两者之间的差距;第二阶段通过反向传播算法计算损失误差对每一个参数的梯度,再根据梯度和学习率,使用梯度下降算法更新每一个参数。从而使损失函数达到最小值[20]。

其中,yi为目标值;yt为真实的Te值;n为样本个数。
从 CNN 网络离线训练结果(图 4)可以看出,当训练迭代达到 2 000 次时,损失函数不再下降。而 CNN 网络的各种参数在此期间通过对训练参数的反向梯度下降法达到最佳值。

图4 训练 CNN 时损失函数的变化Fig. 4 Change of loss function when training CNN
本文神经网络参数通过选择改变学习速率、隐藏神经元的数量和训练步骤来获得,具体如表 2 所示。由表 2 可以发现,当神经元的数量上升时,训练集中的均方根误差(TRMSE)和交叉验证集中的均方误差(VMSE)均下降,但训练时间会上升。选择不同的训练批次和学习率也会影响网络的性能。实验结果显示,当隐藏神经元为20、训练迭代次数为 2 000、每组的训练数据为10 个、学习率为 0.001 时,TRMSE 与 VMSE 达到最小值,分别为 0.304、0.582。
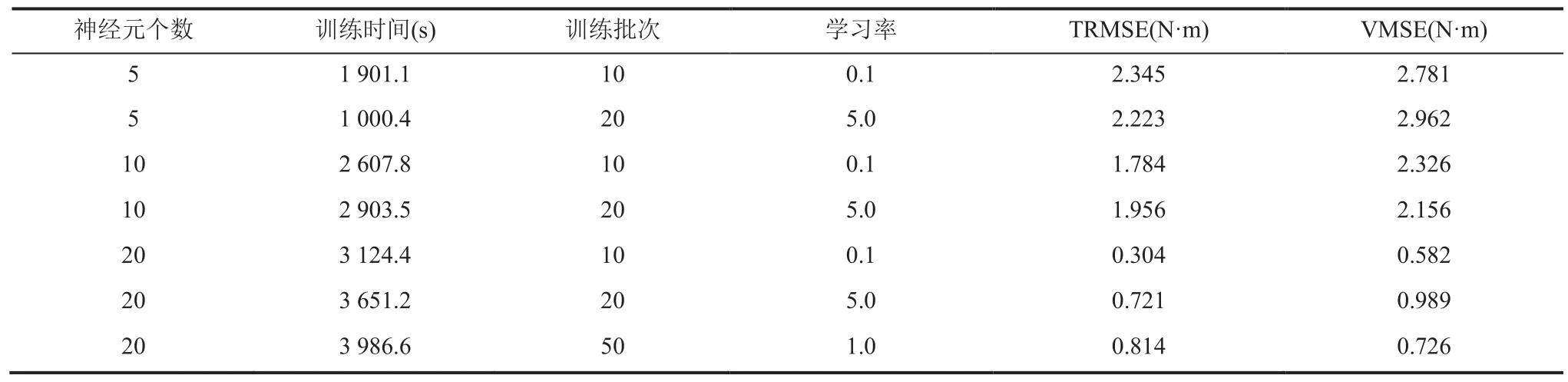
表2 神经网络参数设置Table 2 Parameters of network model
4 仿真结果与分析
本文采用 MATLAB/simulink 作为一个仿真工具来完成实验,同时采用 ubuntu16.04+Python 3.6+tensorflow 1.5 作为深度学习框架。实验中使用的计算机配置为:英特尔酷睿 i7 6700 3.4 GHz,16 GB 内存。实验数据来自在实验室自建立的IPMSM 电机模型。当系统下达转矩命令,首先通过比例积分(PI)控制器和最大转矩电流比(MTPA)控制选择最佳的电流来控制电机的转矩;然后,根据 CNN 网络建立的转矩观测器实时检测电机的电流信号来观测电机的准确转矩;最后,把观测到的转矩信号与转矩信号进行比较,并进行 PI 调节控制,实现控制系统的闭环控制。IPMSM 模型及所建立的 CNN 转矩观测器的结构如图 5 所示。

图5 IPMSM 与转矩观测器的结构Fig. 5 The structure of IPMSM and torque observer model
在测试集中,对基于 CNN 的电机转矩观测器的准确性进行验证。图 6 为散点图,表示不同转矩命令下 CNN 转矩观测器观测到的转矩与电机的真实转矩的重合程度。其中,x坐标代表不同的转矩命令;y坐标表示转矩值;橙色“●”为下达转矩命令的电机实际转矩;蓝色“+”为通过CNN 网络观测器观测到的电磁转矩值。如果橙色和蓝色的散点重叠得好,表明所建立的转矩观测器的观测能力强。图 6 显示,橙色“●”与蓝色“+”重合度高,表明通过所建立的 CNN 模型观测转矩准确。

图6 CNN 预测值与真实值对比Fig. 6 The accuracy of predicted and standard values
把训练好的神经网络放到测试集进行测试,以检验网络模型的转矩预测能力。经过与输出的真实转矩对比发现,所建立的神经网络误差较小,泛化能力较强,预测转矩精确,能满足实际转矩观测器的要求,误差结果如图 7 所示。

图7 测试集中的样本误差Fig. 7 Sample error in test set
为检测所建立网络模型的预测能力,将本文的 CNN 神经网络与传统的后向传播算法(Back Propagation,BP)神经网络进行对比分析。其中,BP 神经网络有很多优点,数学理论证明三层的神经网络就能够以任意精度逼近任何非线性连续函数。这使得其特别适合于求解内部机制复杂的问题,即 BP 神经网络具有较强的非线性映射能力。作为本文参照对比的 BP 神经网络采用3 层神经网络,神经元个数为 20 个,最后经过调节参数,使 BP 神经网络参数达到最优,计算发现该网络的均方根误差和均方误差分别为 1.609、1.253。最终,两种神经网络在测试集中的误差对比结果(图 8)显示,CNN 模型观测到的转矩误差明显比 BP 网络观测到的转矩要小。

图8 CNN 与 BP 神经网络的误差大小对比Fig. 8 The error comparison of CNN and BP network
图9两为种神经网络(CNN 和传统的 3 层BP)设计的转矩观测器在所设计的转矩控制IPMSM 系统中的转矩控制性能比较。结果显示,通过 CNN 网络设计的转矩观测器能很好地识别出转矩命令,而 BP 网络设计的转矩观测器识别的转矩并不精准。
对比两种神经网络模型发现,CNN 比传统的 BP 神经网络的预测能力更强。分析原因,CNN 的网络结构更加接近人脑,更能理解输入信号的特征关系。因此,CNN 网络可以很好地刻画闭环控制系统中电机参数随参数与时间的关系。
将在 tensorflow 平台上训练好的 CNN 神经网络移植到 simulink 上,并把该网络封装转矩观测器,进行仿真验证。图 10 结果显示,当对永磁同步电机给出一个转矩命令(转矩从 0 跳转到20 N.m 并稳定在 30 N.m)时,所建立的转矩观测器快速响应能力好、跟随能力强,能快速准确地估计出当前时刻的转矩,满足实际控制系统的应用。

图9 CNN 与 BP 神经网络转矩观测器在转矩控制系统中的对比Fig. 9 Comparison of performance when the torque observer based on CNN and BP network
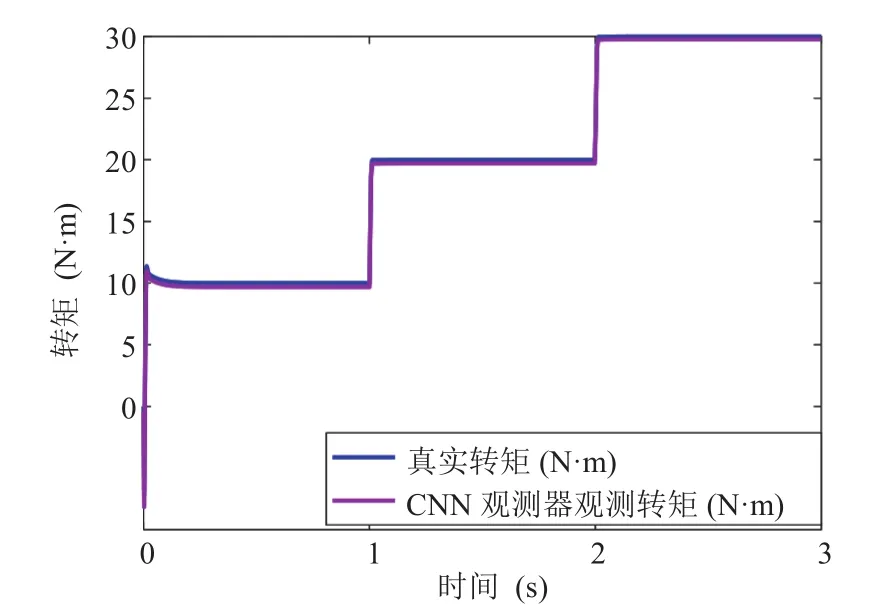
图10 CNN 转矩观测器在 simulink 中的表现Fig. 10 The CNN torque observer in simulink
5 与国内外相似研究的对比分析
转矩观测器在内嵌式永磁同步电机控制中具有重要作用。近年来,随着人工智能的兴起,很多模糊控制策略与人工智能策略广泛应用到电机控制领域,为其提供了良好的方法和智能化的控制策略[21]。
在转矩观测器方面,目前较流行的转矩控制方法有电流双幅斩波控制、微步控制和转矩矢量控制等。这些策略有效地解决了电机换相时转矩脉动过大的问题,但这些策略计算复杂、相应速度慢,不适合需要高精度转矩控制的场合[22]。随着人工智能的发展,外国学者 Abdel-Hamid 等[23]提出了基于 BP 神经网络的转矩观测器,依据内嵌式永磁同步电机信号输出特性从而非线性地分析出电机的转矩。虽然这种方法要求的计算量不大,同时转矩响应时间快,但转矩脉动大,同样不适合高精度的转矩控制。
为了解决转矩波动过大的问题,本文把卷积神经网络引入到电机控制策略上:通过卷积神经网络强大的特征提取能力和非线性拟合能力对神经网络模型进行改进。结果表明,改进后的模型具有良好的转矩脉动抑制作用,且时间响应快,能适用于高精度的转矩控制中。
6 结 论
本文基于 IPMSM 的d-p轴电流与转矩的序列关系,提出了一种基于卷积神经网络(CNN)的 IPMSM 电磁转矩估计的新方法。实验发现,基于深度学习的 CNN 算法估算的转矩精度高于传统的神经网络的计算精度,克服了预测转矩谐波大的劣势。这表明可以用结构简单的 CNN 网络来代替复杂的转矩计算。电磁转矩观测器对IPMSM 的控制具有较大的实际意义,把训练好的 CNN 网络制作成电机电磁转矩观测器,移植到转矩控制 IPMSM 的系统中,可以代替传统的电机电磁转矩观测器,同时具有结构简单、精度高、反应速度快等优点。在未来的研究中,将考虑并使用 CNN 网络或更多优秀的深度学习算法到永磁同步电机控制中,以进一步提高电机控制精度。
