应用于PEMFC的DC/DC变换器数字化控制电路研究
2018-11-22石治国陈向锋
石治国, 陈向锋
(92853部队,兴城 125106)
0 引言
PEMFC氢能发电机因其无污染、高效率、无噪声和具有连续工作和模块化的特点,特别是具有不受“卡诺”循环限制、工作温度低、热辐射小等优点[1,2],在军用和民用领域都具有十分广阔的应用前景。
由于PEMFC发电机发出的是一种电特性独特的电压相对偏低的直流电,不仅动态情况下输出电压变化剧烈,静态情况下的负载电压与空载电压之间也存在很大的差异,在PEMFC发电系统中通常需要一个前级DC/DC变换器[3]将其输出电压提升和稳定在一个所需要的电压, 以满足后级单相逆变器的供电要求,同时实现高频电气隔离。
1 PEMFC发电机的输出特性
实验所得的PEMFC发电机动态特性曲线如图1、图2所示。

图1 突增直流负载(从空载到4.07 kW)

图2 突减直流负载(从4 kW到空载)
从所测得的动态电压波形可以看出,负载发生变化时,PEMFC发电机输出电压也随之改变,增大负载时电压先降低后升高且有波动,减小负载时电压升高的速度较快。这就要求在PEMFC发电系统中,需要一个前级DC/DC变换器将其输出电压提升和稳定在一个所需要的电压, 以满足后级单相逆变器的供电要求。
2 PEMFC发电机DC/DC变换器数字化控制电路结构
本文所设计的数字控制系统是通过DSP将信号采集电路采集到的电压电流信号进行转换和处理,产生PWM脉冲波形,经脉冲隔离驱动电路分别给移相全桥电路的四个功率管提供PWM信号,其硬件结构如图3所示[4-7]。
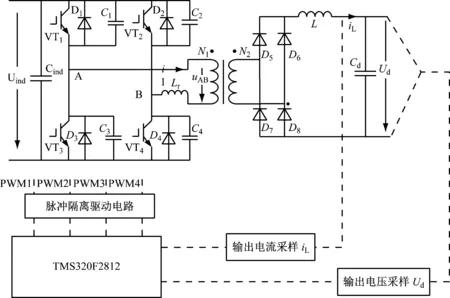
图3 移相全桥数字控制系统结构图
其中,电压、电流传感器采用南京茶花VSM025A和CSM025A ,DSP选用美国TI(德州仪器)公司的TMS320F2812,功率管驱动芯片选用IR公司的IR2113,下面将对各个器件在不同模块中的应用进行具体分析。
3 基于DSP全比较单元的移相脉冲生成原理与设计
3.1 移相脉冲的生成原理
目前,常见的移相脉冲生成方法主要有:基于EPROM存储器的移相PWM脉冲生成方法,基于DSP和CPLD的移相PWM数字实现方法和基于DSP全比较单元的移相脉冲生成方法[8-9]。对于基于EPROM存储器的移相PWM脉冲生成方法,一般是在EPROM中开辟出n个连续的数据块,每个数据块有m个字,这种方法增加了硬件成本,控制的实现较难,不具有应用的普遍性。对于基于DSP和CPLD的移相PWM数字实现方法,其是以DSP里的通用定时器为基础产生PWM波形,每个通用定时器可以提供一路单独的指定周期和脉宽的PWM输出通道,而同侧桥臂的开关器件的死区时间设置通过CPLD来实现,这种方法不需要改变硬件电路,实现起来比较简单,但是不够灵活,而且增加了外围电路成本。TMS32OF2812 DSP具有两个事件管理器(EVA和EVB),每一个都有3对全比较单元,每个比较单元都有两个互补的PWM输出,其死区和输出极性可编程。因此,本文采用基于DSP全比较单元的移相脉冲生成方法,下面将对该方法的生成原理和设计过程进行详细分析。
对需要产生的PWM信号具有如下要求:
1.上下桥臂两管的驱动信号相差180°,设置相应的死区时间。
2.四路PWM信号的占空比固定,考虑到死区时间的存在,设置实际输出占空比0.45。
3.对角桥臂上的两个功率管的驱动信号存在移相角,超前管超前于滞后管一个移相角,移相角的范围为0~180°。
根据上面的要求生成相应的移相脉冲,原理如下:利用事件管理器EVA中的全比较单元1和2,产生4路PWM脉冲。通过全比较单元1,产生超前桥臂的两路脉冲,通过全比较单元2,产生滞后桥臂的两路脉冲。按照反馈的电压电流采样值,在两次比较中断时不断更新两个全比较单元的比较寄存器(CMPR1)的值。当比较单元1产生比较中断时, 如果此时通用定时器T1CNT减计数,则赋给比较寄存器CMPR1新的比较值Valu1,该值使计数器产生计数增; 如果此时通用定时器T1CNT增计数,则赋给CMPR1新的比较值Valu2,该值使计数器产生计数减。基于DSP全比较单元的移相脉冲生成原理如图4所示。

图4 基于DSP全比较单元的移相脉冲生成原理
通用定时器T1CNT按照连续增/减计数方式计数,计数器的计数周期为脉冲周期。死区时间通过可编程死区控制单元DBTCONA来设置,比较寄存器影子寄存器的装载条件为下溢或周期匹配中断。实际编程时,需要按照实际的PWM周期设置对称波形的计数周期。
使用EVA比较单元产生PWM波形,需要对EVA进行如下配置:
1.设置和装载ACTRA;
2.使能死区功能,设置和装载DBTCONA;
3.初始化CMPR1;
4.设置和装载COMCONA;
5.设置和装载T1CON,启动操作;
6.更新寄存器CMPR1的值。
已知输出的移相脉冲频率为20 kHz,TMS320F2812的时钟频率为150 MHz,指令周期为6.67 ns,由此可得计数周期T=150×106/20×103=7500,而通用定时器按照连续增/减方式工作,故设置通用定时器的计数周期值为3 750。
根据上面的参数,可得:最小移相角:θmin=180/3750=0.048°;
从上面的计算可以看出,采用基于DSP全比较单元生成的移相脉冲和模拟芯片相比,具有更高的精确度,能够更好的达到控制的要求。
3.2 移相脉冲的仿真实现
通过前面对移相脉冲的生成原理分析可知,移相PWM是通过DSP的全比较单元来实现的,其流程图如图5所示。

图5 移相脉冲生成流程图
将电压电流调节器输出的信号与固定频率(f=20 kHz)的台阶锯齿波信号进行比较,通过逻辑运算,产生相应开关管的驱动信号。
根据移相脉冲的生成流程图在MATLAB中建立移相脉冲生成模块,如图6所示。

图6 移相脉冲产生模块
其中,Pluse1幅值为1,周期0.000 025 s,脉冲宽度占周期的90%,延迟相位0s;Pluse2幅值为1,周期0.00005 s,脉冲宽度占周期的50%,延迟相位-0.00005 s;固定延时TD延迟时间0.000025 s,可变延时VTD1和VTD的输入为Angle,延迟时间初始值0,最大延迟时间0.000025 s,最后输出频率为20 kHz(周期0.00005 s)、幅值为1的4个可移相脉冲序列PWM1、PWM2、PWM3、PWM4,通过仿真得移相脉冲波形如图7所示。



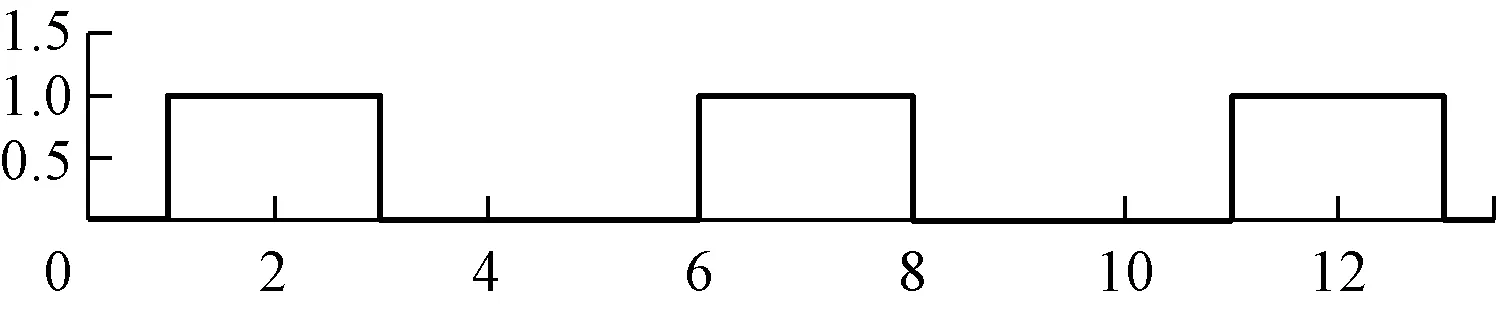
图7 移相脉冲的仿真实现
从仿真波形可以看出,开关管的驱动脉冲PWM1和PWM4,PWM2和PWM3实现了移相,同桥臂上下管驱动脉冲PWM1和PWM3,PWM2和PWM4实现了互补,并且实现了死区时间的设置。
4 电压电流采样电路的设计
为了实现输出电压和电流达到预期值,本变换器采用电压外环电流内环双闭环控制,这就需要对输出电压和电流进行采样控制。而出于对电路可靠性的要求,电压、电流的采样要与控制电路隔离,以避免主电路中大电流流过地线时压降带来的干扰。
霍尔电流、电压传感器具有优越的电性能,是一种先进的、能隔离主电路回路和控制电路的电检测元件,因此本机选用电压、电流霍尔元件进行电压电流的检测。霍尔电压传感器的工作原理:传感器的原边串入大电阻,得到原边电流,该电流在副边产生一定比例的副边电流,副边电流流过电阻产生的压降能够反映主电路的电流值。霍尔电流传感器的工作原理是:原边电流在副边产生一定比例的副边电流,副边电流流过电阻产生的压降能够反映主电路的电压值。
本机选用的霍尔电压传感器为南京茶花VSM025A,原、副边匝数比为3000∶1200,霍尔电流传感器为南京茶花CSM025A,原、副边匝数比为1∶1000。电压采样电路如图8所示。
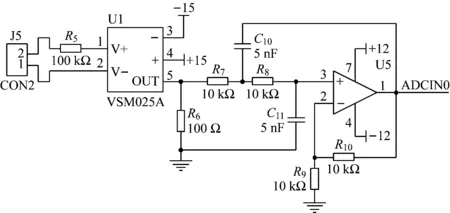
图8 电压采样电路
其中:Ud为主电路电压。
电流采样电路如图9所示。

图9 电流采样电路
从上面的分析可以看出,经过霍尔电压、电流传感器的隔离和运放电路的处理后,采样输出电压不仅满足了DSP中AD模块0~3 V的电压要求,还实现了主电路和控制电路的电气隔离,提高了系统的抗干扰能力。
5 系统的仿真与结果分析
为了验证所设计的主电路和控制电路的可行性,本节利用MATLAB的Simulink平台对该系统进行了仿真研究[10-11],仿真电路如图10所示。
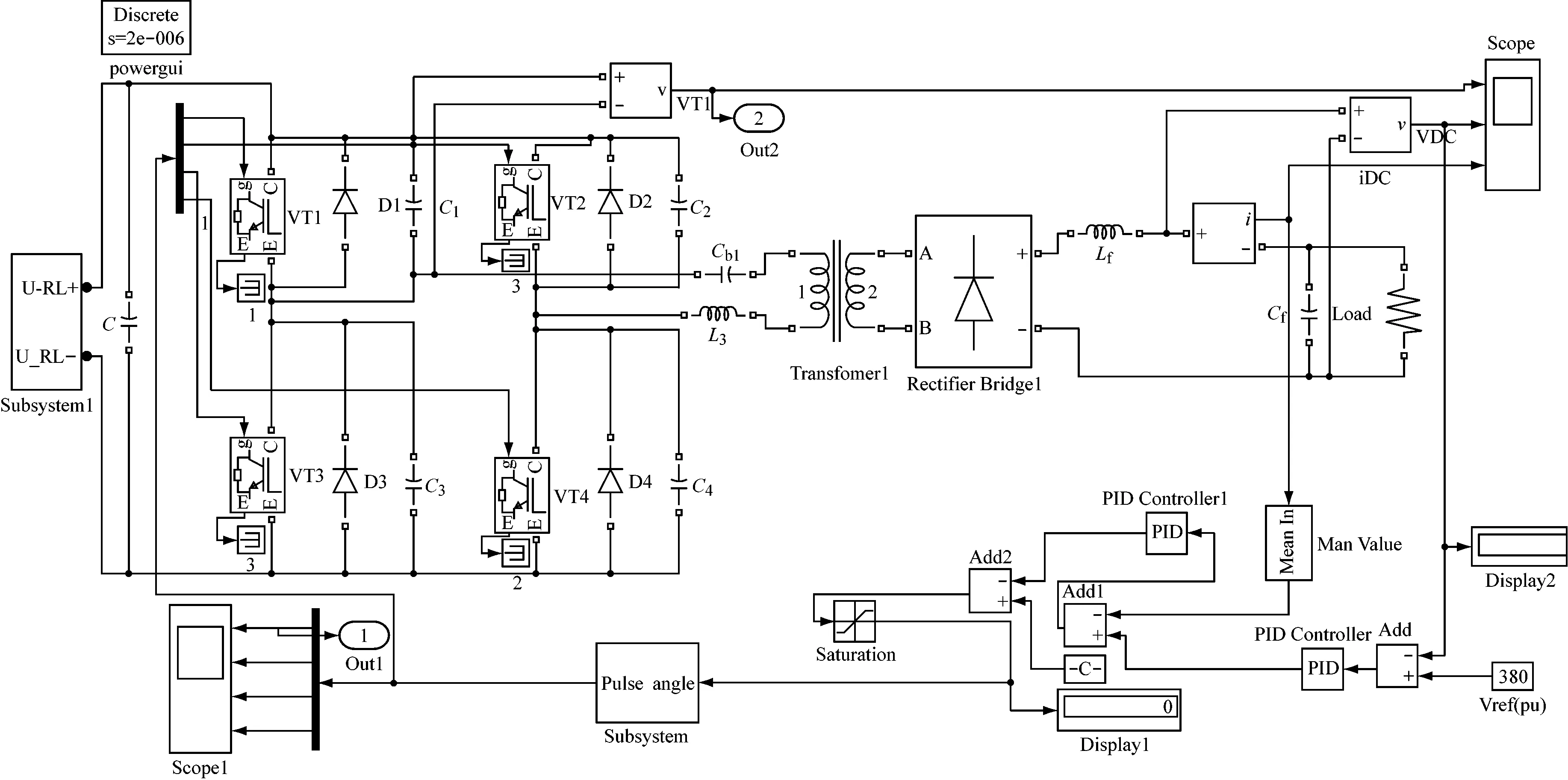
图10 系统仿真电路原理图
仿真电路参数设置如下:输入电压源为Subsystem1加载模型;高频逆变桥采用四个IGBT/Diodes塔接而成,IGBT功率开关管参数按FGA180N30D的参数设置,漏源级间电容为3420pF;单相高频变压器,容量5 kVA,频率20 kHz,变比为5/48;高频整流桥采用Diodes结构,并采用默认参数;隔直电容Cb=930 μF,谐振电感L3=0.9μH,滤波电感Lf=630 μH,滤波电容Cf=2 200 μF;中间直流参考值380 V;电压外环PI调节器比例系数10,积分系数0.005,输出限值-100到100;电流内环PI调节器比例系数为100,积分系数为0.0005,输出限值-25e-6到25e-6;采样时间2 μs。
得到满载情况下系统的仿真波形如下所示,超前桥臂和滞后桥臂的软开关波形,如图11、图12所示。
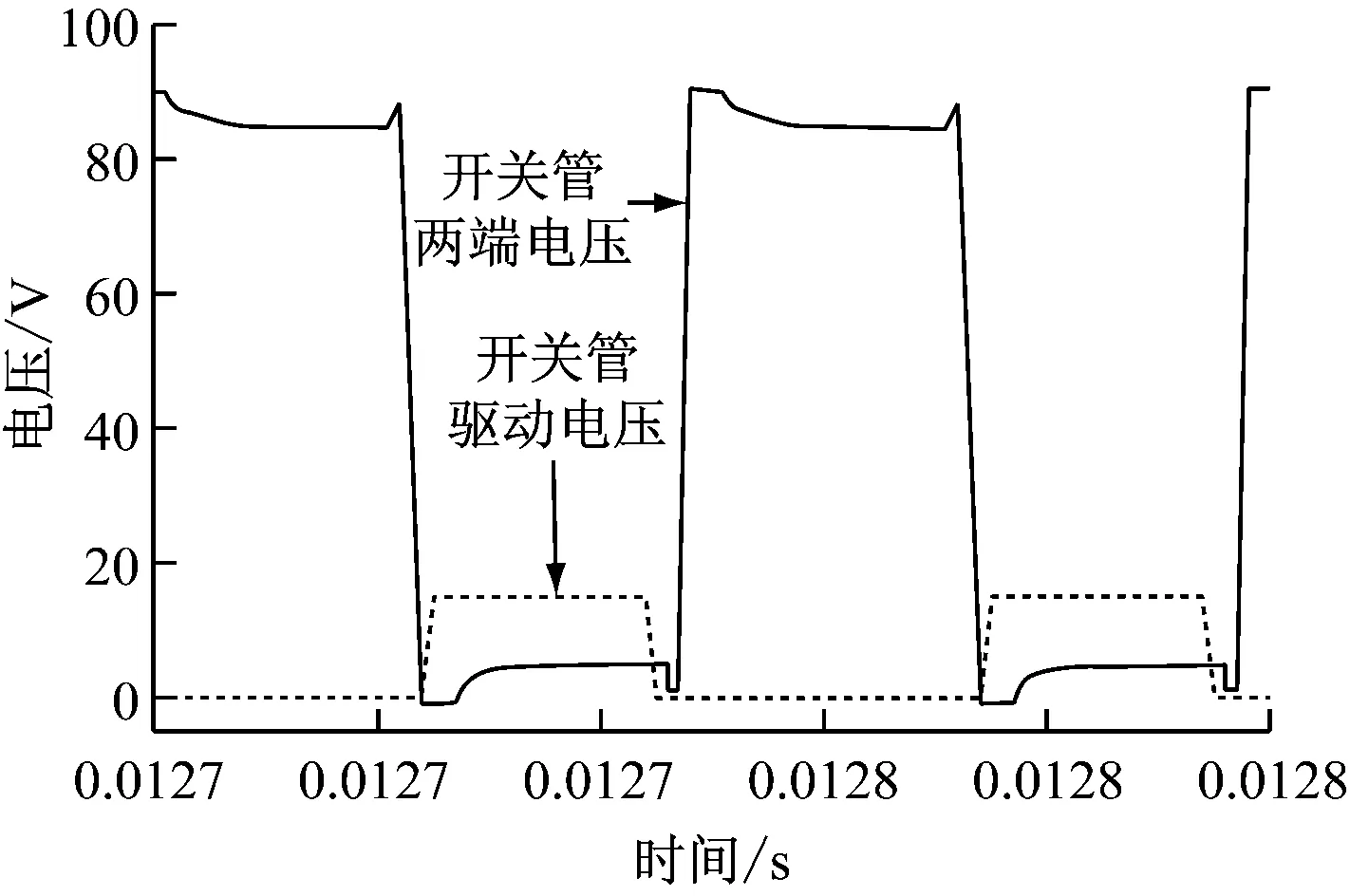
图11 超前桥臂ZVS软开关
从图11和图12中可以看出,当驱动电压加在开关管上时,开关管两端的电压下降到零,这说明系统实现了ZVS软开关。
变压器初级侧和次级侧两端的电压波形,如图13、图14所示。
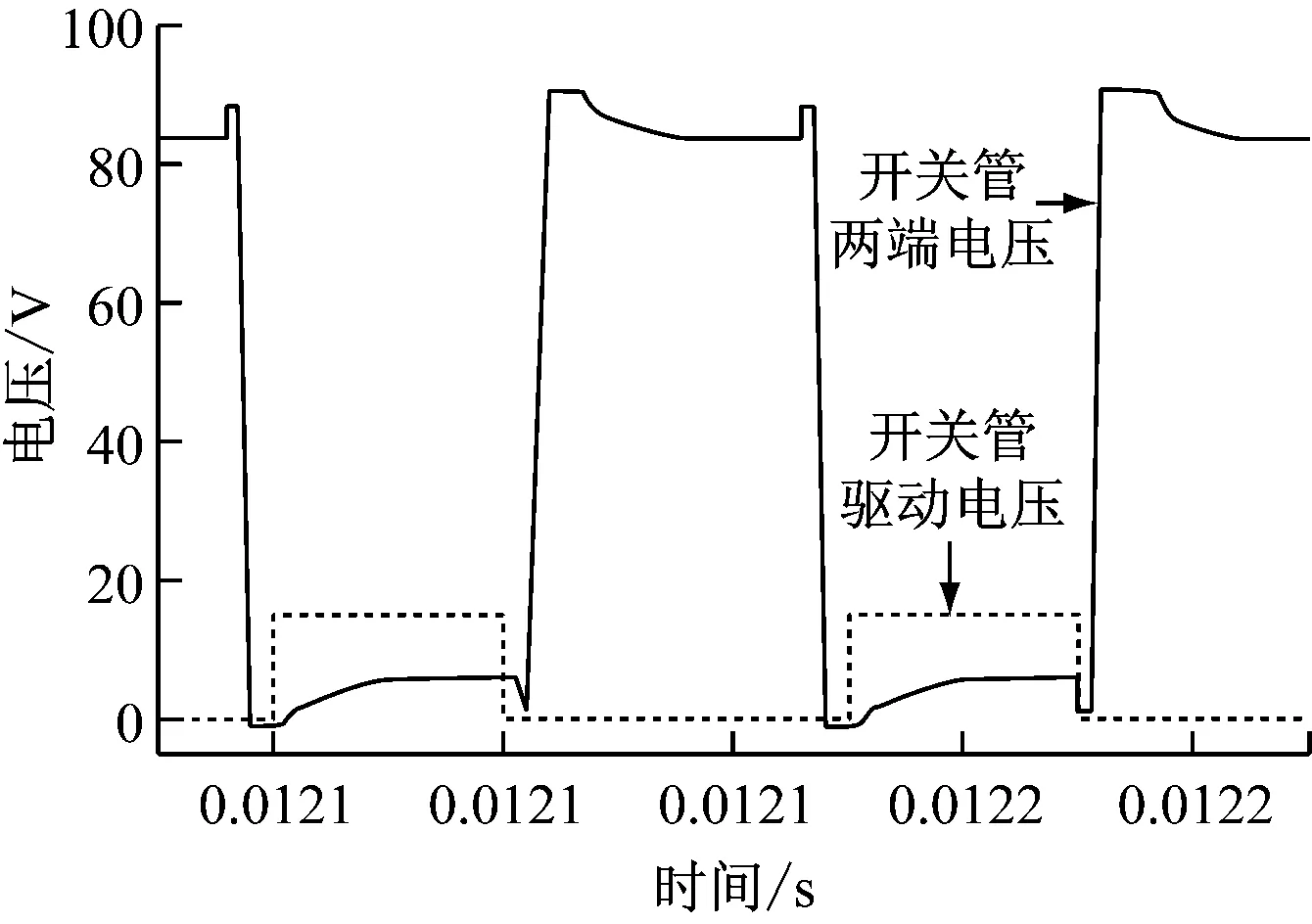
图12 滞后桥臂ZVS软开关

图13 变压器初级侧电压波形
从仿真波形图可以看出,两者均为正负交变的方波电压,幅值均能达到要求,但电压波形的毛刺较大,产生了振荡,这是由于变压器漏感与IGBT的输出电容谐振造成的,为解决这个问题,在实际电路的设计中,应注意给IGBT加吸收电路。
系统突加负载和突减负载时的输出电压波形,如图15、图16所示。

图14 变压器次级侧电压波形
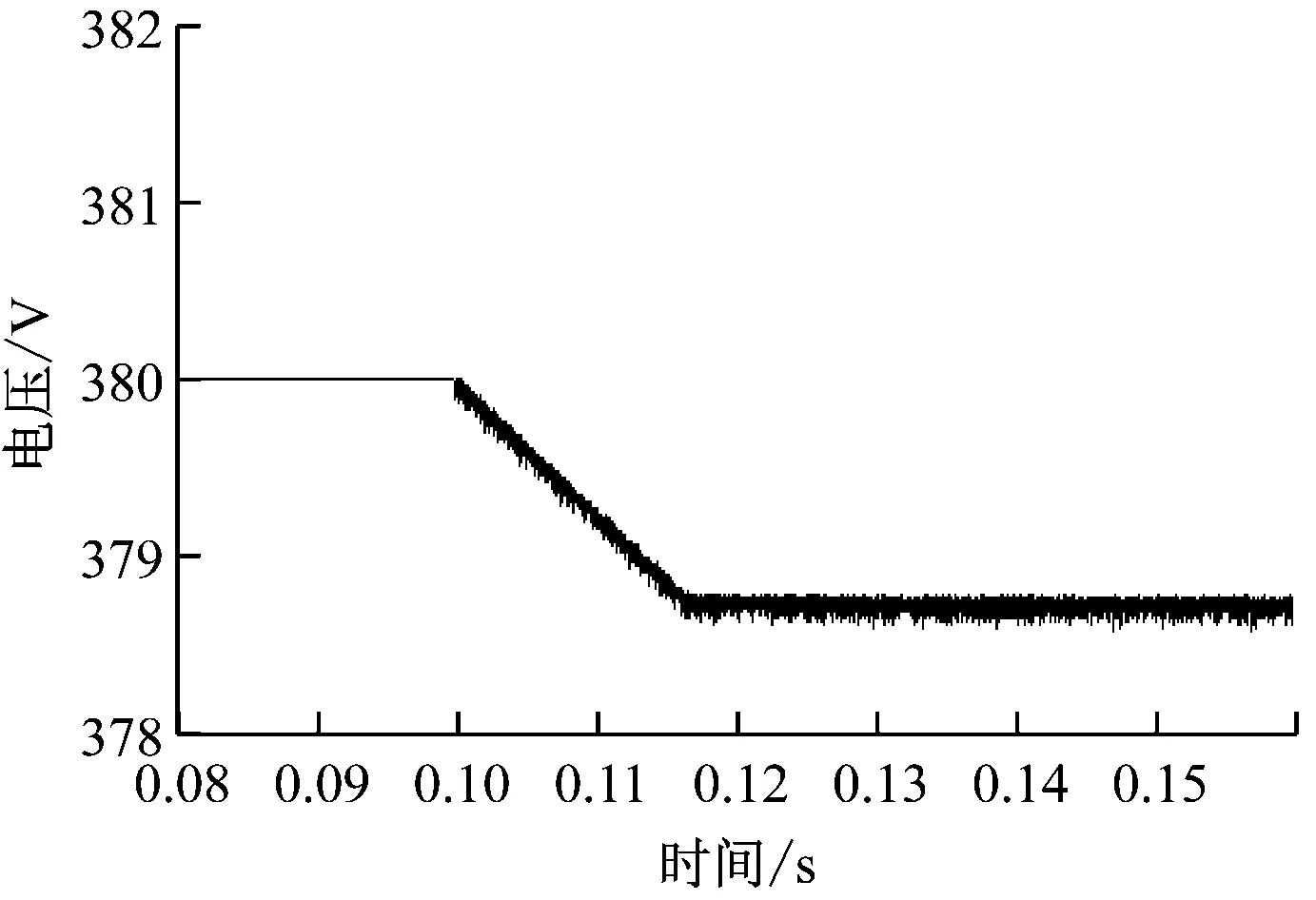
图15 突加负载时的输出电压波形

图16 突减负载时的输出电压波形
从图中可以看出,输出电压在突加负载时电压略有跌落,突减负载时电压突升,但电压跌落和突升小于1.4V,这说明所设计的DC/DC变换器能很好的改善PEMFC怪异的动态输出特性。
7 总结
本文确定了数字控制系统的实现方案,介绍了基于DSP全比较单元的移相脉冲生成方法,仿真实现了移向脉冲的生成。设计了DSP的相关硬件电路和电压电流采样电路,确定了数字控制系统的控制参数,通过MATLAB的Simulink平台对所设计的系统进行了仿真分析,验证了所设计的主电路和控制电路对于PEMFC发电机的适应性。
