PLC在智能机械控制上的应用与关键技术分析
2018-11-15薄润芳
薄润芳
(鄂尔多斯职业学院, 内蒙古 鄂尔多斯 017010)
引言
在知识经济发展背景下,基于新一代信息技术创新发展与应用下的智能制造已经成为社会现代化建设与发展的新主题、新动力、新趋势。基于此,在当前提倡构建网络强国、制造强国,重视信息化、自动化、智能化建设的背景下,有必要加强PLC在智能机械控制上的应用与关键技术分析,推动智能机械优化发展。
1 PLC控制系统概述
PLC控制系统最早形成于20世纪60年代的美国,是在传统继电器控制原理创新的基础上得以发展,并随着信息处理技术、网络通信技术、计算机技术、控制技术的创新与应用得到强化与完善,并逐渐取代传统继电器控制系统,在逻辑控制、过程控制以及运动控制等领域得到广泛应用。
通常情况下,PLC控制系统主要由可编程逻辑控制器(PLC)、逻辑组态软件以及监督管控组态软件等共同组成,能够执行系统中已经存储的逻辑运算、计算、定时、顺序操控等指令,并在数据信息采集、输入、输出下,依据工艺流程操作要求进行实践操作,完成各类机械装置控制任务[1]。就可编程逻辑控制器而言,编程逻辑控制器是PLC控制系统的核心部分,是在通信技术、控制技术、通信技术等结合应用下形成的数字化控制设备,主要由电源板块、中央处理器板块、I/O((input/output,输入/输出端口)板块、功能与通信板块等共同组成,用以促进用户与系统的连接,并在现场总线技术应用下,实现现场设备之间、设备与系统之间的通信;就逻辑组态软件而言,是系统监控层中的重要组成部分,主要运行在上位机开发环境中,以实现在线诊断、监控、逻辑翻译控制、离线仿真等功能;而监控组态软件侧重于数据采集与机械过程控制,能够科学控制需求灵活组态,系统控制要求,提升控制系统监控水平[2]。因此,PLC控制系统在智能机械控制中的应用,可有效提升系统运行的安全性、稳定性、可靠性,并在模块化设计中提升系统维护管理的便捷性。
2 PLC在智能机械控制上的应用——以智能机械手臂控制为例
智能机械手臂是应用较为广泛的典型智能机械控制系统,以智能机械手臂为例,分析PLC在智能机械控制系统中的应用及其关键技术,具有代表性。由图1可知,智能机械手臂在日常运行过程中,当通电启动后,检测装置依托传感技术进行工位到位检测,并根据检测结果发送信号,当信号传递到PLC控制系统中时,系统依据信号执行“下降”指令,实现机械下降操作;当机械下降到指定位置后,PLC检测到“下降到位”信号,并发出“下降停止”指令,机械停止下降操作,依据“抓紧”操作指令,进行工件抓紧;待完成抓紧操作后,PLC控制系统发出“上升”指令,当上升到一定位置后,根据实际需求,发出左右移动指令,当系统检测到“到位”信号后,停止移动并执行“放松”指令;检测到工件到位后,执行“上升——停止”指令,形成循环作业模式[3]。
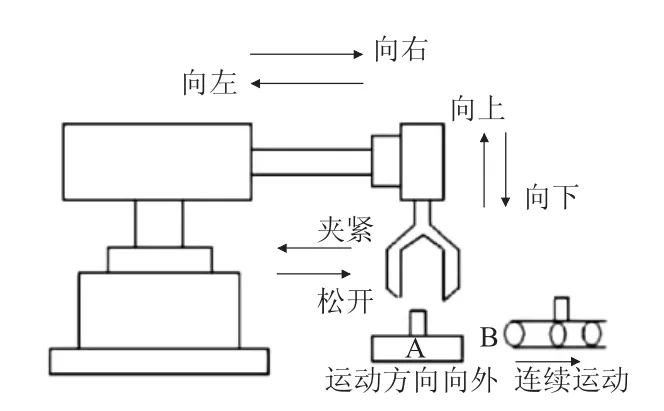
图1 智能机械手臂工作流程图
从智能机械手臂系统组成结构出发,PLC应用下的关键技术主要体现在以下几个方面。
1)主控系统中的关键技术:主控系统是智能机械手臂控制系统中的重要组成部分,也是PLC控制系统应用的核心所在。其主要功能在于通过应用可编程存储装置,实现编辑程序的内部存储,并进行逻辑运算、定时、顺序操控等指令的发出与执行。与此同时,系统中配有自动程序与手段程序处理板块,能够依据控制编程原则实现机械动作的自动与手段管控,实现系统运行故障自动检测。在此过程中,需以先进的 CPU(Central Processing Unit/Processor,微处理器)技术为支撑,提升系统可控性。
2)电气系统中的关键技术:电气系统侧重于系统中和电气设备的有效管控,如继电器、电源装置、I/O设备等,实现电气设备自身功能在系统中的充分发挥,保证系统稳定与正常运行。在此过程中,需配置电气设备检测技术、信号转换技术、继电器控制技术等关键技术,实现各种信号的有效检测、输入、输出与监控。
3)机械系统中的关键技术:机械系统是指令执行的重要载体,主要由机械手、机械臂、机械身、机械腕等硬件组成。其“向上、向下、向左、向右、放松、抓紧、工件到位”等功能的实现,需依托DCS(Distributed Control System,分布控制)技术、OS(OperatingSystem,操作系统)软件技术来实现。通过模块化、系统化、规范化、开放化设计,实现信息实时更新与传输,提升系统控制可靠性,简化控制系统结构,提升操作灵活性。
3 PLC在智能机械控制上的发展趋势
随着新一代信息技术的创新发展与应用,PLC在智能机械控制系统中的应用将得到进一步优化,呈现出更智能、更安全、更可控的发展趋势。
例如,在PLC控制系统研究过程中,面对越来越复杂的智能机械执行任务以及控制要求,需实现PLC控制系统“认知——决策——监控”多功能一体化操作,在网络协同、分布式管控下进行多设备、多控制装置的完美连接,做到集成化、标准化、智能化管控,以提升系统运行要求,实现智能化发展。与此同时,随着网络开放程度的不断提升,网络环境通讯安全、系统设备运行稳定成为PLC在智能机械控制系统中应用所需关注与研究的重点问题。对此,应促进PLC技术与网络安全技术的有机融合,利用安全密钥技术,提升PLC系统网络终端通信的安全性、真实性、准确性;通过构建系统运行状态安全评估模型,加强系统网络安全风险的识别、防范能力,实现PLC系统故障与状态运行稳定的科学诊断与处理,在保证系统结构简单的同时,提升操作行为、信息存储能力与资源配置的可信性,推动系统向更安全的方向发展。此外,相关工作人员需加强PLC控制系统编程组态软件、可编程逻辑控制器以及逻辑组态软件的自主研发能力,实现可编程逻辑控制器以及软件在系统环境中的自适应性。同时,基于数据库、微处理器芯片、操作系统、现场总线布局、机械设备等核心技术与基础设施的完善,形成能够完全自主管控的生态链,以推动PLC控制系统向更可控的方向发展。
4 结语
可编程控制器作为自动化系统控制体系中的重要组成设备,随着智能制造系统的不断优化以及先进信息技术的不断创新,已经得到进一步发展并广泛应用于智能机械控制中,提升智能机械控制质量与运行安全。与此同时,PLC与新技术的有机结合,将推动智能机械控制系统向更智能、更安全、更可控等方向发展。本文以智能机械手臂为例,通过分析PLC在智能机械控制上的应用与关键技术,旨在加强对PLC的认知与理解,为智能机械控制系统优化设计提供有益参考。