基于改进下垂控制的主从微电网无差调频策略
2018-11-13肖迎群
高 佳, 肖迎群
(1. 贵州大学 电气工程学院,贵州 贵阳 550025; 2. 贵州理工学院 大数据学院,贵州 贵阳 550003)
0 引言
微电网是实现分布式能源高效利用的一种解决方式。微电网具有双重角色,既能与主网并网运行,也能断开与主网的连接,转为孤岛运行。微电网不仅可以向主网提供功率支撑,满足对主网辅助服务的需要,也是优良的电能供给者,作为一个可定制电源,满足用户多样化的用电需求,这些优势的发挥依赖于微电网控制技术的完善。频率特性是微电网的重要特性之一,微电网在并网运行时,主网运行的频率即是微电网频率。孤网运行时,微电网频率由多个微电源的调频特性共同决定。不同微电源的原动机利用能源类型不同,同时原动机对微电网的接口也有差别,一般微电源的基本接口有3种:即逆变器接口、同步发电机接口和异步发电机接口。而主网中原动机基本上为同步发电机,主网的频率与有功功率存在着一次调频关系,微电网同主网的原动机类型差异,使得不能直接将主网功频特性的分析方法运用于微电网,因此有必要对微电网有功功率和频率关系进行深入研究,由于一般光伏发电、风力发电和潮汐能等可再生能源发电都广泛地应用了逆变器接口,因此本文讨论了逆变器接口的控制方法,主要目的是通过控制逆变器来控制有功功率的输出,从而达到调节系统频率的作用,文献[1]用自适应控制方法调整有功功率,沿着均方误差梯度负方向寻找最合适的下垂系数,使微电网频率控制在允许范围内。文献[2]采用鲁棒控制方法优化了下垂控制,提高了在下垂控制策略中电压和频率的精度。文献[3]引入电压补偿环节和频率补偿环节,改进了功率环反馈控制器,降低了系统频率和母线电压误差。本文在分析了逆变器的有功功率—频率下垂曲线的基础上,在功率反馈环前加入了PI控制环节,改进了下垂控制策略的传递函数,并且将采用改进下垂控制的DG作为主源,实现了主从控制的微电网无差调频。
1 逆变器控制策略
1.1 改进下垂控制原理
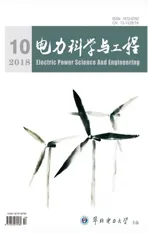
下垂控制模拟了主网发电机的调频特性,人为地在逆变器控制策略中加入了有功功率—频率下垂曲线,不断地微调逆变器输出的频率,从而满足负荷有功功率的需求。下垂控制结构如图1所示。图中Udc为逆变器直流电压,Vn为逆变器输出电压,in为逆变器输出电流,R、L和C为滤波器的等值电阻、电感和电容,Un为电网电压,iL为负载电流,ic为电容电流,功率检测模块通过测量逆变器输出的瞬时电压和电流计算出瞬时功率P,将瞬时功率同给定的参考功率P0相比较,可得到扰动功率ΔP。
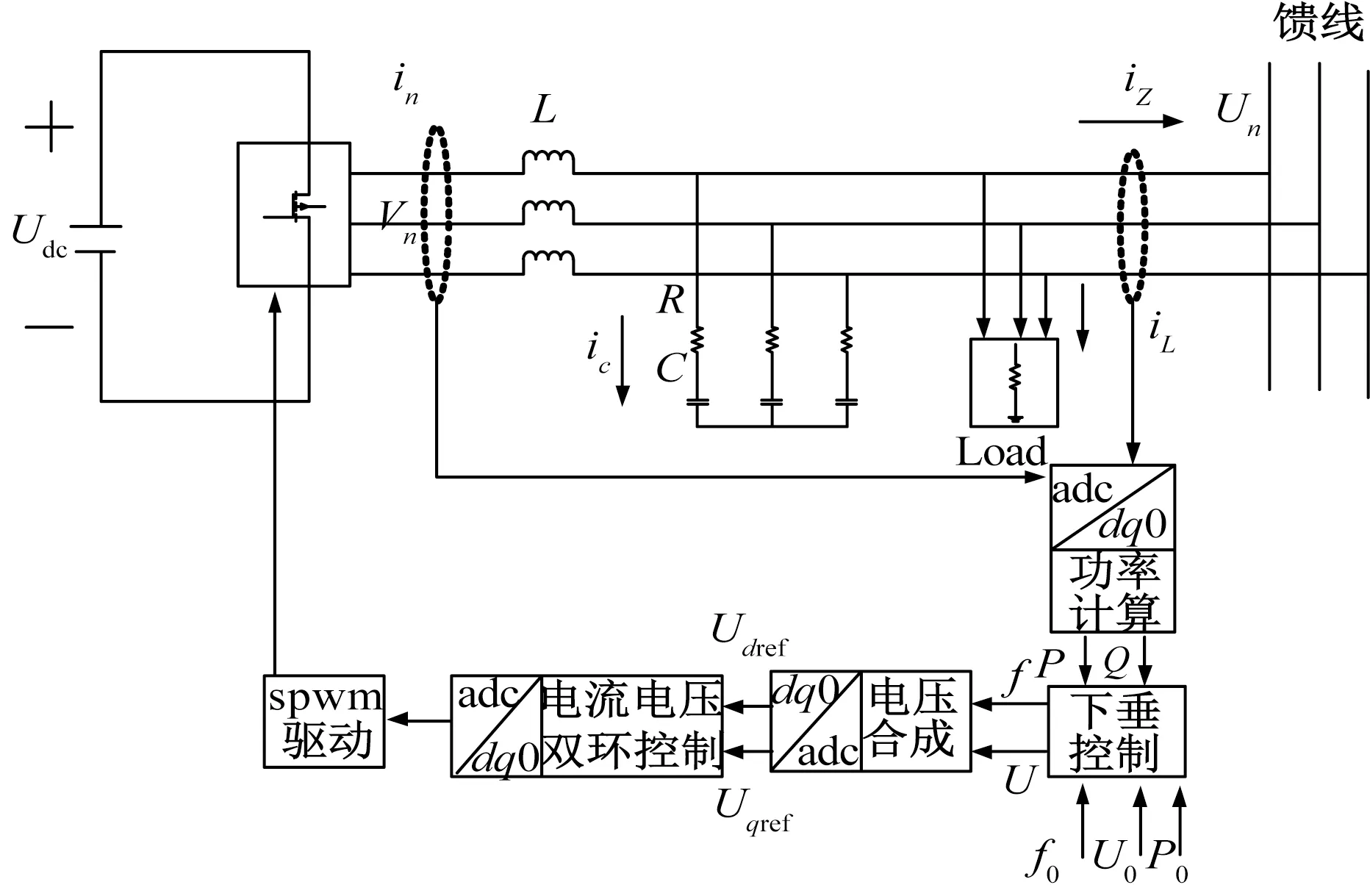
图1 下垂控制结构图
通过图2所示的下垂特性曲线1可以直观地展现出频率的调整过程。
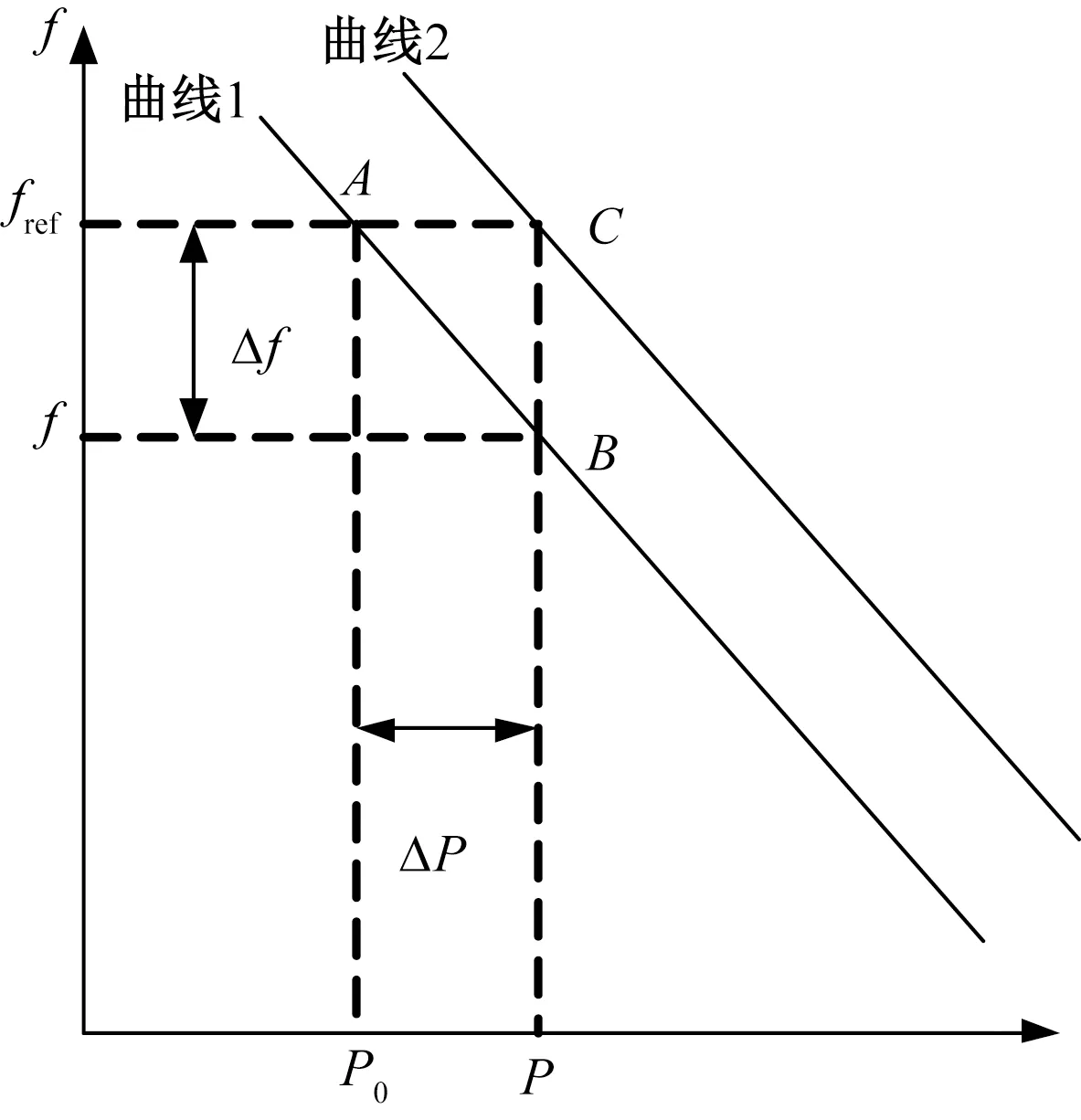
图2 下垂特性曲线
逆变器初始工作在A点,此时输出的有功功率为额定功率,频率为额定频率fref,当负荷发生变化增加ΔP,此时由于下垂控制作用工作点沿着下垂曲线移动到B点,输出的频率下降Δf,达到新的稳定工作点时的频率为f,由此实现了系统有功功率的合理分配,调整输出的有功功率P必须满足条件:0≤P≤Pmax,频率下垂系数可以表示为下式:
(1)
其中,Pmax为逆变器频率下降最大时允许输出的最大有功功率,P0为逆变器工作在额定频率时输出的有功功率,fref为微电网的额定频率,P、f为系统在实际工作点的参数。可见,这种人为的下垂控制可以实现逆变器功率跟随负载功率的自动调整,最终达到功率平衡,但是牺牲了系统频率的稳态指标,而且传统下垂系数是一个常数,对于环境适应性较差,不能够满足微电网负荷扰动变化较大的情况。如果此时将下垂曲线1保持斜率不变向右平移,使逆变器的工作点变为C点,由下垂曲线2可知,可使频率恢复到fref,这样,当负荷发生变化时,不断地修正P0的值,使逆变器的工作点平移到下垂曲线2的C点,即可以实现无差调频。本文在功率反馈前加入了PI控制器,设计的无差调频控制策略的传递函数如图3所示。
(2)
式(2)即是起到无差调频作用的比例积分控制环节,其传递函数用图3中的虚线部分表示。在负载功率变化的过程中,实时检测逆变器的输出频率,作为反馈信号同参考频率作比较,得到的误差信号经过PI控制器调整,用于补偿系统频率,直到微电网输出功率同负载功率达到平衡,频率恢复到额定值。
图3 无差调频策略传递函数
下垂控制结构图1中的PWM逆变器一般采用图4所示的电压电流双闭环控制,外环控制回路电压,调整电压波形的影响,内环是电流控制环,用于提高系统的动态性能,电压控制环将逆变器输出的瞬时电压同电压参考值相比较,得到的误差信号通过比例积分控制器调节后作为电流控制环的参考值,电流控制环将逆变器输出的瞬时电流同参考电流相比较,得到的误差信号经过比例控制器运算,得到内环的控制信号,然后送入PWM调制器产生PWM波。
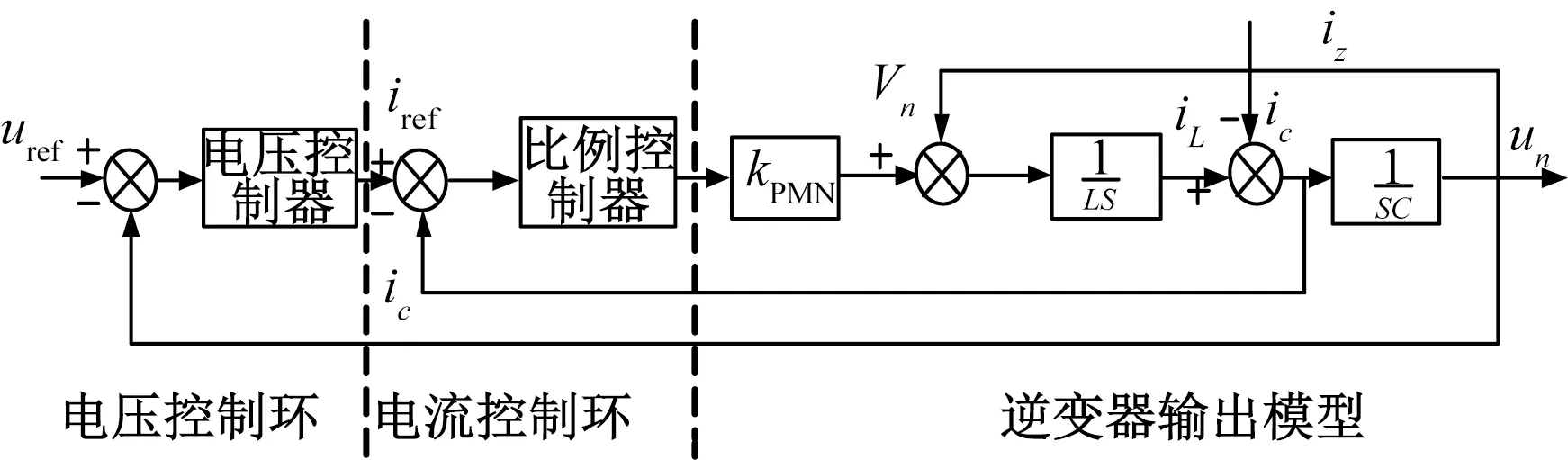
图4 逆变器电压电流双环控制
1.2 PQ控制原理
PQ控制(恒功率控制)是指逆变器按照参考功率值输出有功功率和无功功率,分布式发电系统被处理为恒功率输出,采用PQ控制的DG不参与电压和频率调节,并网时其电压和频率由主网提供刚性支撑,孤网运行时电压和频率由主控微源提供支撑。逆变器通过控制输出电压来控制输出电流,进而控制逆变器输出的有功功率和无功功率,同时用锁相环节获得电网频率。PQ控制框图如图5所示,图中Vn为逆变器输出电压,in为逆变器输出电流,R、L和C为滤波器的等值电阻、电感和电容,Pref、Qref为给定的参考有功功率和无功功率。
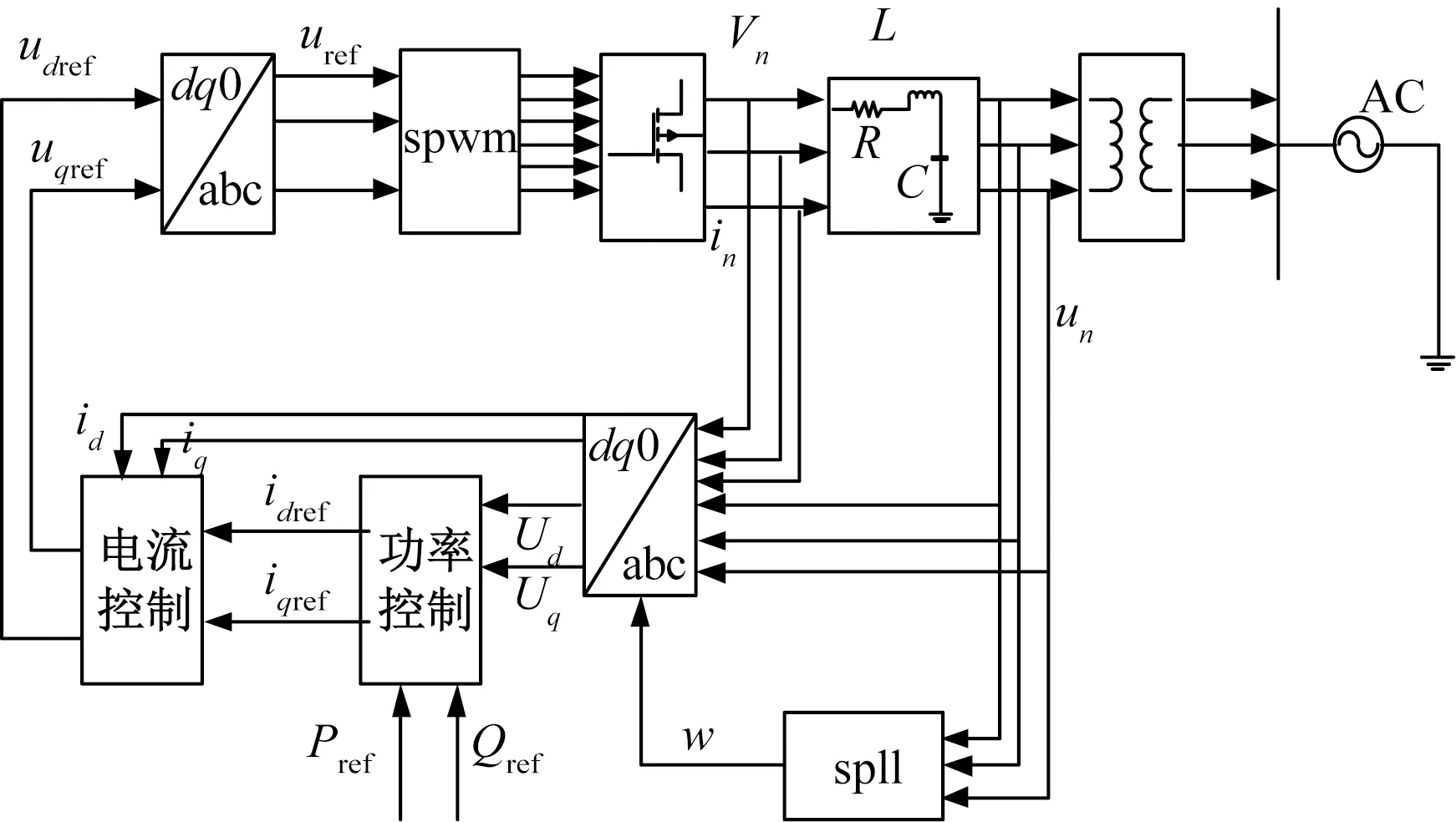
图5 PQ控制框图
根据图5可以写出逆变器输出电路的电压方程如下式:
(3)
对式(3)用Park变换将abc坐标系变换到dq轴旋转坐标,得到逆变器的输出电路电压方程为:
(4)
式中:ωLiq和ωLid为微分环节在Park变换过程中的dq交叉耦合项,电网电压un可以表示为下式:
(5)
将电网电压式(5)进行Park变换:
(6)
逆变器输出的有功和无功可以表示为:
(7)
将式(6)代入式(7)中,可以得到
(8)
从上式(8)可以看出,如果电网电压保持恒定,有功功率P跟d轴电流成线性关系,无功功率Q跟q轴电流成线性关系,控制dq轴的电流就可以实现功率的控制。将电网电压u和dq轴交叉耦合项整合为Vd2和Vq2,重新定义公式(4)为:
(9)
从上式(9)可以看出,分别控制dq轴上的电流就能控制电压Vd1和Vq1,根据这个关系可以设计电流内环控制器,通常采用PI控制器。
(10)
由此可以得到功率控制环和电流控制环的结构框图如图6所示。输出的有功功率P和无功功率Q与参考功率相比较,经过PI控制器调节后作为电流控制环的参考电流idref,再同逆变器输出电流id相比较,得到的误差电流经过PI控制器调节后加上dq交叉耦合项,可得到参考电压,反Park变化后,三相参考电压送入PWM产生器后便可形成控制逆变器的PWM波。
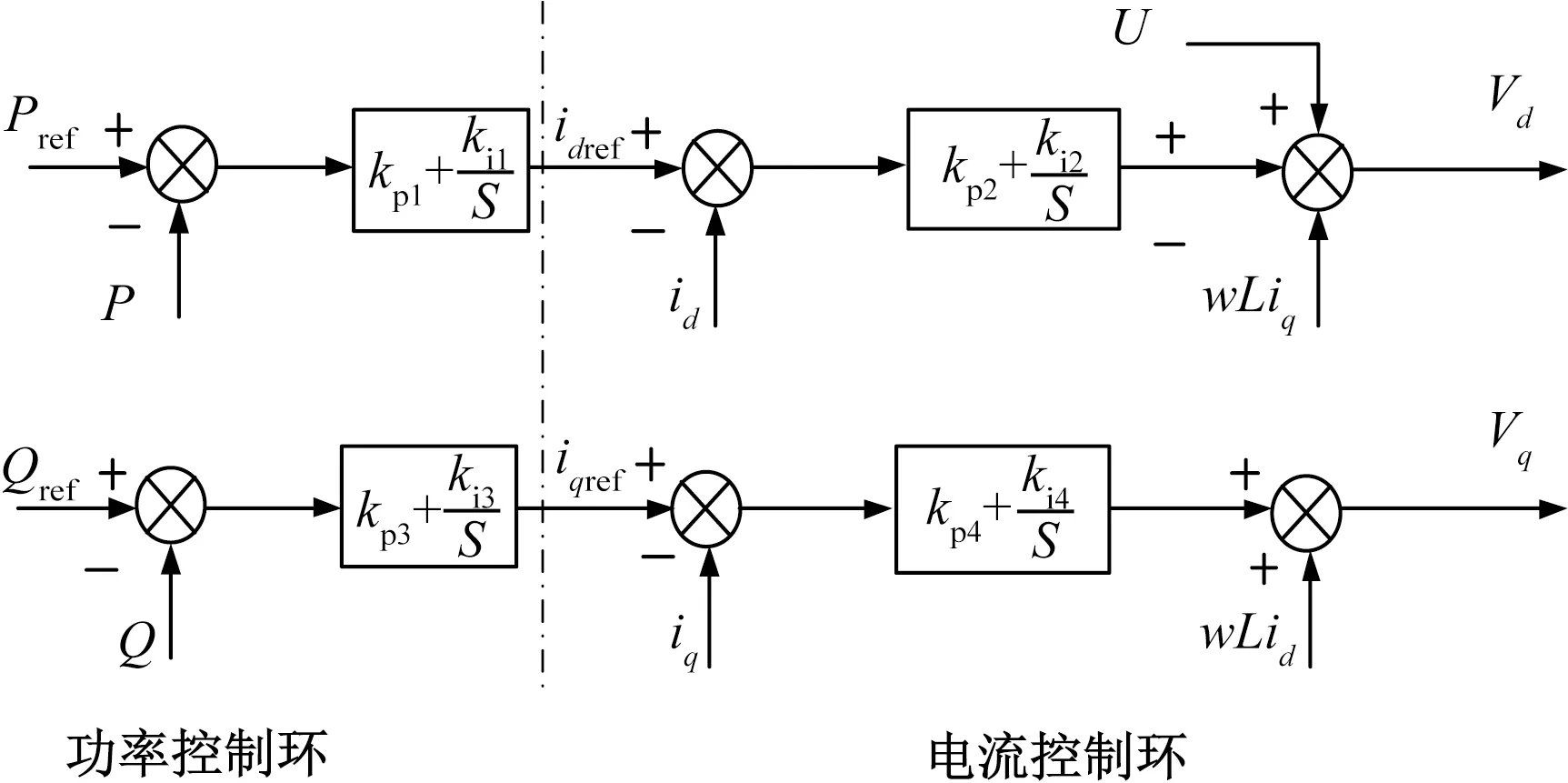
图6 功率电流双环控制的结构框图
2 微电网的主从控制策略
主从控制策略是微电网主要控制方式之一,当微电网并网运行时,所有的DG均采用PQ控制,向主网提供或者消耗功率,频率和电压幅值由主网提供刚性支撑。离网运行时将微电网中一个或者几个DG作为主控微源,通常主控微源都采用V/F控制,本文中的主控DG采用改进下垂控制,为孤网中的其他DG提供频率和电压支撑。由于负荷的瞬时波动一般都是由主控DG出力来达到功率平衡,所以要求主控DG有充足的容量,文中主要研究改进下垂控制的主控DG能否实现微电网内部的无差调频,不研究微源内部情况,所以文中的微源都用直流电源代替。为了验证改进下垂控制在微电网运行的有效性,设计了含有3个微源的主从控制结构如图7所示。负荷1、负荷2为可变负荷,负荷3为可中断负荷,当微电网运行在高峰时段或者紧急状况时可以切断。
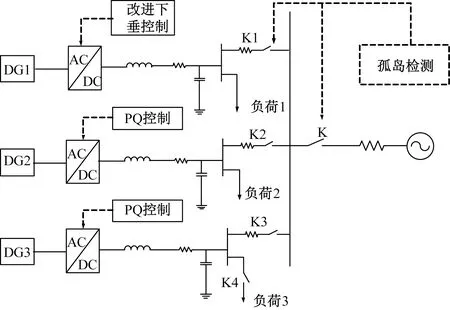
图7 主从控制结构
微网并网运行时,并网开关K、K2、K3闭合, DG2、DG3采用PQ控制。开关K断开,K1闭合,这一动作看成微网运行状态由并网切换到孤网,DG1设置为主源,采用改进下垂控制,DG2、DG3控制方式不变。微电网主从控制开关详细动作设置及其负荷有功功率变化如表1所示。
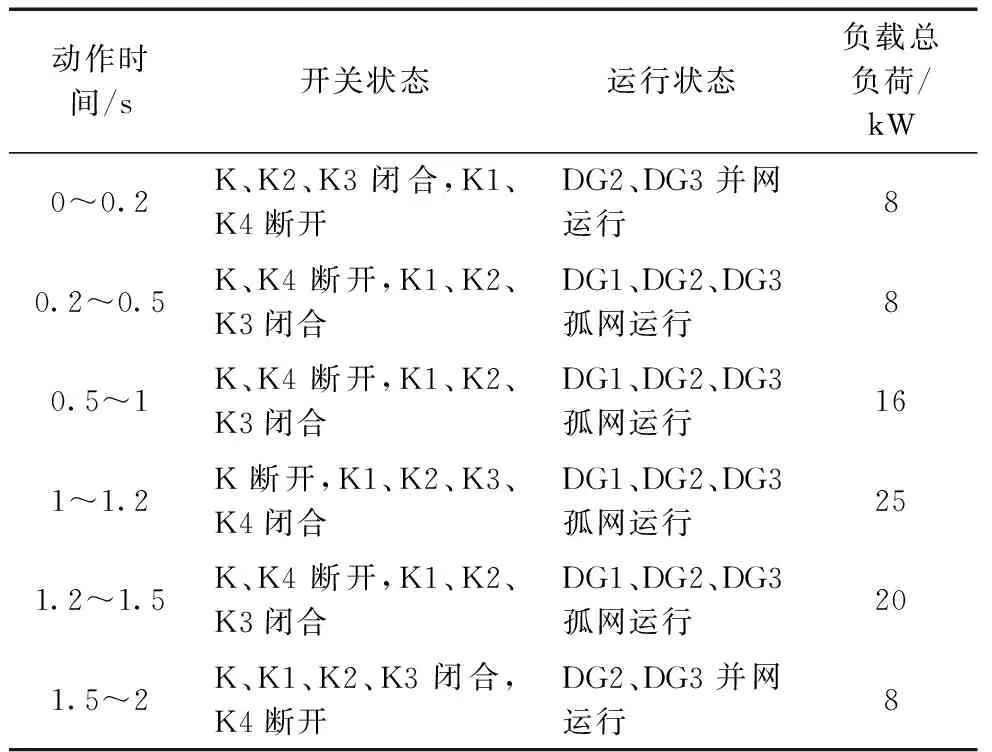
表1 主从微电网运行状态
3 仿真分析
为了验证主源采用改进下垂控制的主从控制策略能实现微电网孤网运行的无差调频,基于图7和表1所示微电网的结构和运行状态,在MATLAB/SIMULINK仿真平台上建立了如图8所示的微电网模型。微电网的参数见表2。
(1)0.2 s时开关K动作,微电网由并网切换到孤岛运行模式。
在0.2 s微电网与配电网断开连接,输出功率变化如图9所示。微电网进入孤网运行后,主源DG1跟踪负荷变化,输出的有功功率降低。 DG2、DG3由于采用PQ控制,输出的有功功率不变。微电网频率波形变化如图10所示,当主控微源DG1采用传统下垂控制时,微电网由并网运行向孤岛运行切换的过程中,系统频率会有细微波动,在0.1 s频率达到稳定状态后偏离频率额定值。当主控微源DG1采用改进下垂控制时,微电网由并网运行向孤岛运行切换的过程中,系统频率几乎没有变化。

图8 微电网仿真模型

DG1Vdc=800 V,R=0.01 Ω,L=0.6×10-3 H,C=1.5×10-3 H,fref=50 Hz,V0=380 V,Pn1=0.6×104 WDG2Vdc=800 V, R=0.01 Ω,L=3×10-3 H,C=10×10-6 F,Pn1=6.5×103 W,Qn1=0 VarDG3Vdc=800 V, R=0.01 Ω,L=3×10-3 H,C=10×10-6 F,Pn2=5×103 W, Qn2=0 Var下垂控制电流电压双环控制器:kp=10,ki=100下垂系数:kpf=×10-5改进下垂控制PI控制器:kp=0.01,ki=1 500电流电压双环控制器:kp=10,ki=100下垂系数:kpf=8×10-5PQ控制SPLL:kp=60,ki=1 400内环PI控制器参数:kp=12.5,ki=1 800
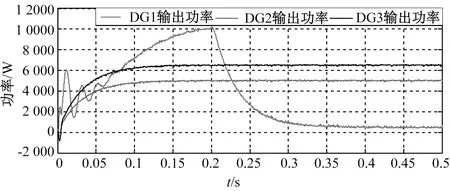
图9 并网切换到孤岛各DG有功功率变化
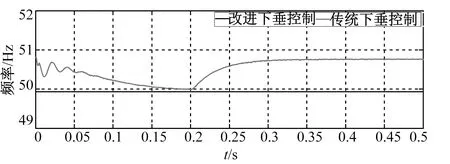
图10 并网切换到孤岛微电网频率变化
(2)0.2~1.5 s过程中微电网工作在孤网运行模式,变化负荷功率模拟快速投切负荷。
在孤岛运行时,负载功率变化完全由主控微源DG1跟踪,在0.5 s、1 s时切换负荷开关,向系统投入负荷,1.2 s时快速切除可中断负荷,主源DG1输出功率由图11可知,在投入负荷时DG1输出有功功率增加,切除负荷时DG1输出有功功率减少,可知DG1下垂控制模型能够较好地跟随负荷扰动,保证了孤岛运行的功率平衡。DG2,DG3由于采用PQ控制,其有功功率仍然按照参考功率输出,在投切负荷时输出的功率不发生变化。
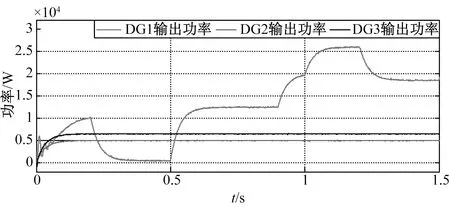
图11 孤网运行下投负荷时各DG有功功率变化
频率变化如图12所示,当主控微源DG1采用传统下垂控制时,根据下垂特性曲线在投入负荷的过程中,为了实现逆变器输出功率和负载功率相平衡,频率不断在额定值附近波动,虽然能够使频率控制在允许范围内,但是稳态时频率存在着静态误差,当主控微源DG1采用含有积分控制的改进下垂控制,频率变化由图12可以看出,在外部快速投切负荷的过程中,频率稳定在额定值,在微电网孤网运行时频率保持稳定实现了无差调频。
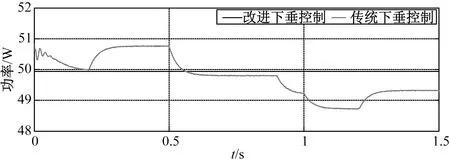
图12 孤网运行下投负荷时频率变化
(3)1.5 s时使开关K闭合,微电网由孤网运行方式切换到并网运行。
如图13所示,在运行模式切换过程中,DG1输出有功功率波动较大,约在0.3 s后达到稳定状态,主控微源DG1在孤网运行到并网运行切换的过程中输出的有功功率明显减少,说明了并网后一部分负荷由主网承担。而DG2、DG3仍然采用的PQ控制,输出的功率维持不变。主控微源DG1分别采用传统下垂控制和改进下垂控制的系统频率仿真曲线如图14所示,微电网在并网运行时的频率由主网提供支撑,主源在采用传统下垂控制时,在运行模式切换过程中频率波动较大,约在0.4 s过后达到稳态。改进下垂控制在运行模式切换过程中仍然能够保证系统频率的稳定,进一步说明了改进下垂控制在微电网中的可靠性。
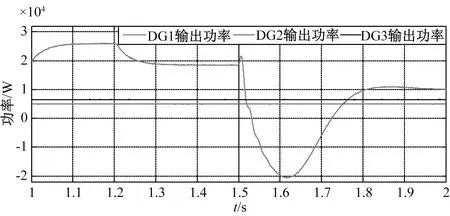
图13 孤网切换到并网各DG有功功率变化
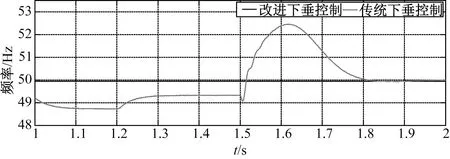
图14 孤网切换到并网各DG频率变化
4 结论
本文针对传统的下垂控制策略的不足,改进了下垂控制策略,在有功功率反馈前加入了PI控制环节,并且将主从控制的主控微源采用改进下垂控制,仿真了微电网的并网、快速投切负荷、孤网几种运行状态,下垂控制模型能够很好地跟踪到负荷变化,保证微电网运行的功率平衡。主控微源采用改进下垂控制与采用传统下垂控制方式相比较,前者不仅消除了孤岛运行时投切负荷的频率静态误差,实现了频率的无差调节,而且在微电网并网和孤网运行模式切换过程中,很大程度地降低了频率波动。由于本文主要研究微电网的无差调频控制策略,直接将微源等效为直流电源,忽略了微电源运行特性对微网的影响,下一步有待展开对微电源原动机运行特性的研究。