新型钢管打捆机械手的结构设计及仿真分析
2018-11-09柴晓艳
李 震,柴晓艳
(1.天津理工大学 天津市先进机电系统设计与智能控制重点研究实验室,天津 300384;2.机电工程国家级实验教学示范中心(天津理工大学),天津 300384)
0 前言
随着我国工业的产业结构逐渐升级,国内的钢材用量增长迅速,特别是钢管行业取得了长足发展,我国的钢管产量多年来稳居世界首位,国内相关行业对于钢管生产设备的性能提出了更高的要求。传统的钢管打包机设备体积大,且无法对废旧钢带进行利用,新型钢管包打捆机械手将钢管包打捆动作与机器人技术有机的结合起来,使用废钢带对钢管包进行打捆,不仅提高了打捆机械手的工作效率,且降低了生产成本[1]。
1 新型打捆机械手的整体设计分析
新型打捆机械手机械结构的设计关系到后续的仿真分析和优化设计,特别是对关键部件的设计对机械手的有限元轻量化和美观性有着重要影响。对机械手进行完整的结构设计后,需要根据设计的尺寸和装配方式对机械手进行三维建模,应用三维设计软件soildworks对机械手进行三维模型设计。
1.1 现有钢管打捆设备
我国钢带打捆设备的研制起步较晚,但经过近30年的发展,已研制出暂时适合国内使用的打捆设备。如图1、图2所示为国内目前使用较为广泛的两款打捆设备。
图1为采用标准钢带包打捆的打捆设备,这款设备稳定性好,而且标准成捆的钢带厚度较小、较易弯折,打捆过程中将标准成捆的钢带包首先放置在打捆设备上,然后再使用该设备进行拉紧动作。图2为目前国内使用较多的简易打捆设备,这款设备可以使用废旧钢带进行打捆,采用人工打包方式在钢管槽中进行打包,降低了生产成本,但是在打捆过程中的打捆动作需要很大部分的人工参与,自动化程度较低。
图1 采用标准钢带的钢管打捆机
图2 废带打捆简易设备
针对以上两种使用较多的打捆设备,存在明显缺陷,图1中设备采用标准钢带进行打捆,成本较高;图2中设备虽然使用了废钢带,但设备自动化水平较低,又不利于生产效率的提高。针对目前国内存在的情况,本文设计的钢带打捆机械手从实际生产出发,将废旧钢管进行重新利用,裁剪成标准长度钢带,在打捆过程中使用废钢带进行打捆,并利用机器人技术完成打捆动作,具备了较高的自动化程度。
1.2 新型打捆机械手的结构设计与分析
在实际生产中,六角形钢管包相比于其他形状的钢管包型,钢管之间更加紧密、运输过程更加平稳,新型的钢管包打捆机械手主要针对六角形钢管包进行打捆。在对打捆机械手进行设计之前需要对钢管包的尺寸进行分析计算,钢管包的周长和高度会对钢带长度和机械手的运动产生影响,由于在对钢管包完成打捆后,所有钢带应有30~70 mm的重叠部分来完成后续的焊接工作,本文主要针对常用外径21.3~114 mm系列共9种型号的钢管包进行分析,各型号钢管包的主要参数经计算后如表1所示。
表1 六角钢管包主要参数
针对钢管包打捆任务的工作要求,新型打捆机械手需要具备以下两个功能:对废钢带的抓取动作、带动钢带跟随机械臂对钢管包进行打捆夹紧,与传统的钢管包打捆设备不同,新型打捆机械手实现了对废钢带的重新利用。
新型打捆机械手机械臂和末端抓取机构的结构简图如图3、图4所示,其中L1、L2、L3分别为机械手的基杆、中间杆和末端执行杆,各杆件之间由转动关节连接,由伺服电机(图中未画出)进行转动角度的控制,实线L1、L2、L3表示机械臂运动的初始位置,粗点画线L1′、L2′、L3′表示机械臂运动的末位置;钢带右端的A点为末端抓取机构对钢带的抓取点,x0、y0分别为基座的横坐标、纵坐标,H为钢管包的高度,C为表1中钢管包的周长,S1、H1分别为基座在X、Y方向的结构所需长度,根据伺服电机尺寸大小,本文分别取220 mm、195 mm,S2为末位置时末端抓取机构的抓取点与中心线的距离,这个距离既需要保证打捆机械手在运行即将结束时不发生碰撞,也要给后续的焊接工作留有足够的操作空间,这里取40 mm作为工作空间。
末端抓取机构是新型打捆机械手对钢带进行打捆动作时的关键部位,末端抓取机构主要是要完成对钢带的夹紧动作。夹紧机构为左右对称结构,选择气缸驱动的方式。当气缸活塞杆下移时,带动连接件1向下运动,在连杆4(5)和副杆2(3)的共同作用下,推动连杆6(7)绕铰链E(F)旋转,推力进入夹紧钳8(9);随后夹紧钳8(9)绕着固定铰链C(D)进行回转运动。当连接件1下移到一定的位置时,在整个增力机构的作用下,完成对钢带AB的夹紧动作。
图3 新型钢带打捆机械手机械臂结构简图
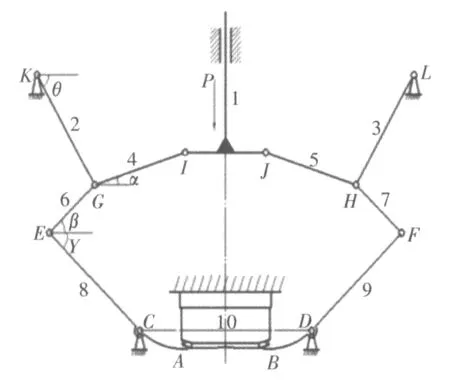
图4 压紧状态下末端抓取机构简图
在初始位置时根据不同钢管包型的钢带长度,调节三机械臂的位置使得两侧末端抓取机构恰好处于钢带的首末两端(即图3中A点)。打捆机械臂和末端抓取机构的整个运动过程分为“夹紧”、“打捆”、“复位”三个行程。首先,两端抓取机构在气缸的作用下,通过自身增力机构获得夹紧钢带所需的夹紧力,将钢带牢牢夹紧,保证在运动过程中钢带不会脱离机械手;随后,三个机械臂在各自关节伺服电机的作用下,各自完成需要转过的角度,到达机构运动的末位置,使得钢带两端重叠在一起,进而进行焊接作业,完成“打捆”动作。最后,在完成对钢带的焊接工作后,气缸活塞杆收缩,带动末端抓取机构松开钢带,机械手完成“复位”。至此,打捆机械手进行了三个工作行程,完成了对钢管包的打捆[2]。
在打捆机械手机构设计中,由于最大包型与最小包型之间的钢带长度与钢管包高度之间的差距较大,所以为安全起见按照最大包型设计的设备尺寸在打捆较小包型时,会显得杆件过长,整体尺寸过大,不利于现场工作空间的合理利用,因此针对这9种包型设计出两套打捆机械手来完成作业任务,两套设备的主要结构尺寸参数见表2,打捆完成后效果图如图5所示。在soildworks中按照各杆件的尺寸以及相对位置完成装配,如图6所示为打捆机械手的示意图[3-6]。
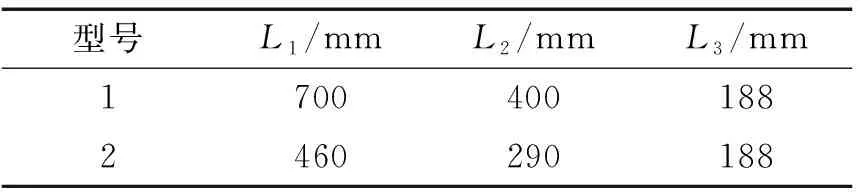
表2 两种型号的打捆机械手各杆件的长度
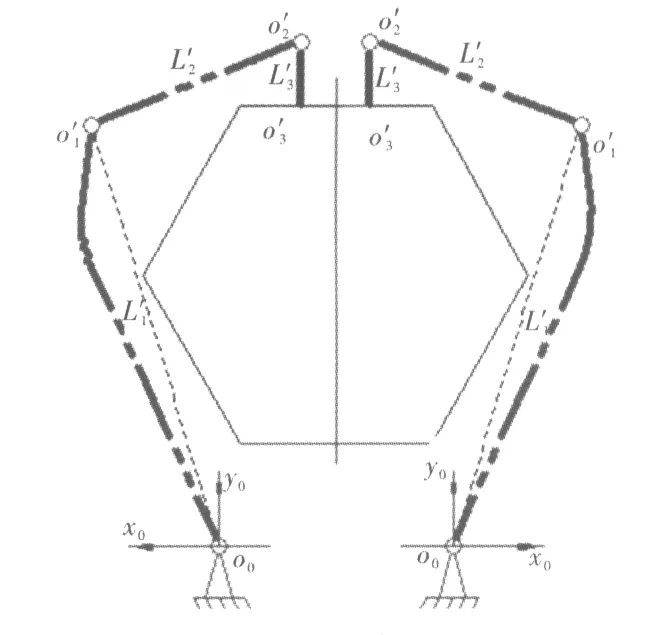
图5 打捆完成示意图
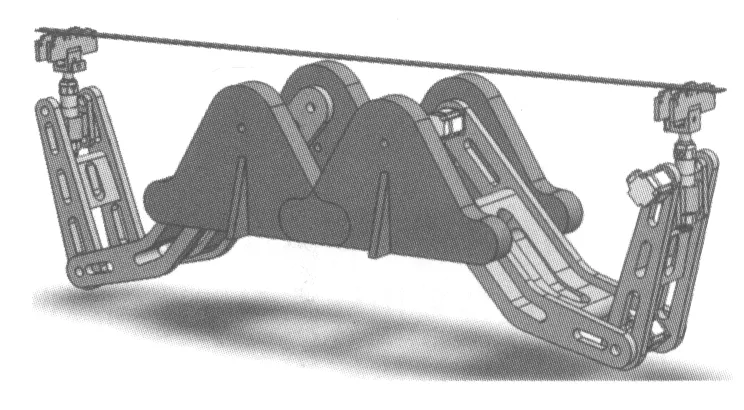
图6 新型打捆机械手示意图
2 基于ADAMS的新型打捆机械手建模及仿真分析
ADAMS是目前国内使用较为广泛的虚拟样机技术软件,可以对实体模型进行仿真运行、结构优化、数据处理等操作,但ADAMS也存在着建模功能差等缺点,所以本文采用soildworks与ADAMS联合建模的方法对打捆机械手进行建模,并使用ADAMS中自带的离散型柔性体建模方法对打捆用钢带进行建模,最后在ADAMS中进行仿真分析[7]。
对打捆机械手进行仿真分析,首先可以验证根据运动学方程编制的驱动函数是否合理,即各关节能否协调整个机械手完成打捆动作。其次,由仿真后得出的速度和加速度图像可以预测出实际运行时的振动情况,为驱动函数的改进提供数据参考。最后,由仿真得出的各关节力矩值,可以为后续对初步设计后的关节电机和减速器进行重新选型提供数据支持,进一步改进设备结构。
2.1 新型打捆机械手模型的建立
Adams中的模型在仿真过程中有时需要发生变形才能完成任务动作,构件的变形需要建立柔性体构件来完成。ADAMS中有两种柔性体建模方法:一是离散型柔性体建模法,这种方法是将一段刚性构件分割成有数段的刚体,小刚体中间用柔性力来连接,由此来模拟柔性体的变形,适用于大变形的简单构件;二是使用ADAMS/Flex建立柔性体,适用于较复杂的构件。由于打捆机械手使用的钢带需要发生较大变形才能将钢管包捆住,且钢带外形简单,因此在建立废钢带柔性体模型时选择离散型柔性体建模法进行建模[8]。
对于φ21.3~φ114 mm系列共9种型号的钢管,考虑到新型打捆机械手可以完成对最大周长的钢管包进行打捆时,就可以完成所有型号钢管包的打捆,两套设备需打捆的最大包型分别为φ88.9 mm和φ42.4 mm型钢管包,考虑到φ42.4 mm型钢管包与φ88.9 mm型钢管包建模及仿真方式完全相同,因此本文只对φ88.9 mm型钢管包进行建模,φ42.4 mm型钢管包的仿真只给出仿真结果。在对打捆机械手进行建模之前,首先应完成钢管包模型的建立。
在打捆机械手仿真运行时由于钢带和钢管要发生接触,最终钢带将钢管贴紧完成打捆动作,因此应在钢带和钢管之间添加接触力,否则钢带和钢管之间会发生干涉,无法完成整个动作仿真。钢带与钢管包之间只要完成与六个边角钢管的接触就可以保证贴紧六个边的所有钢管,因此根据钢管包的边长计算出与六个边角钢管相接触的钢带段即可[9],如图7所示。
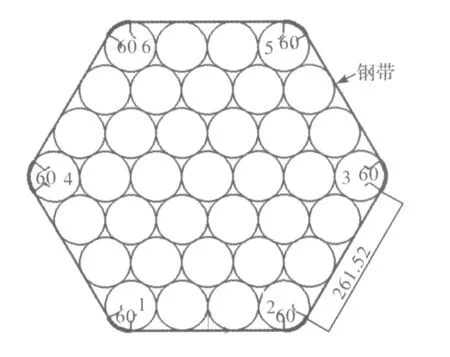
图7 边角钢管示意图
在soildworks中完成了对新型打捆机械手的三维建模后,将三维模型导入ADAMS中,并完成对主要零部件材料的定义。在ADAMS中用转动副和转动驱动的形式来代替伺服电机模拟打捆机械手的运行。由离散法建立的钢带模型两端需要与两侧的末端抓取机构同步运动,完成最终的打捆动作,这里将两端抓取机构和两端钢带段之间建立固定关系,以模拟实际运行中夹持的动作[10、11]。最终仿真结果如图8所示。
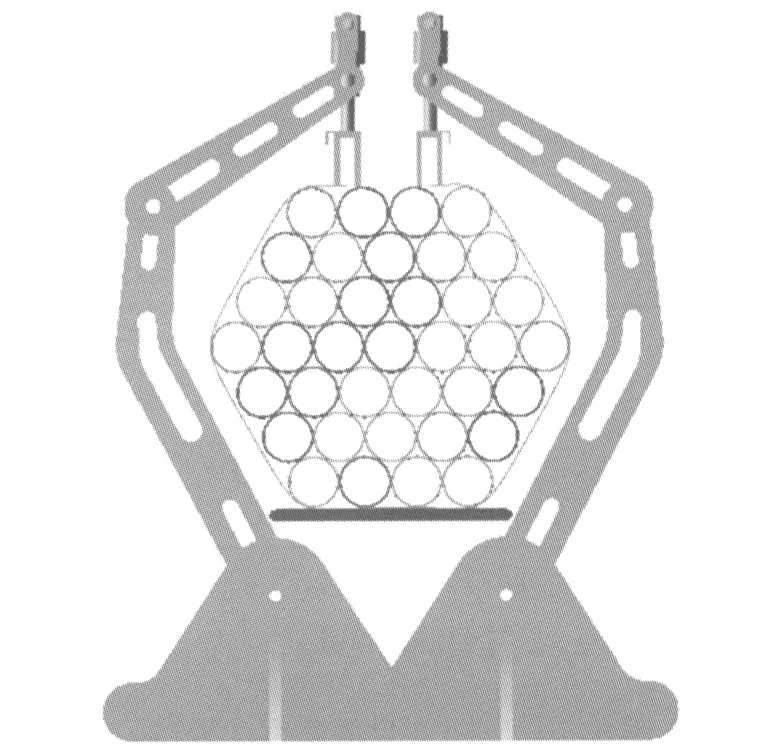
图8 新型打捆设备三维仿真模型
2.2 基于ADAMS的新型打捆机械手仿真分析
ADAMS是专门用于机械系统动态仿真分析软件,具有强大的数值分析和求解功能,可以对系统进行运动学和动力学的深入分析,其结果可以用动画和图表等形式展现出来,方便更加直观的读取所需数据。
2.2.1 基于D-H法的关节驱动函数设计
在参考文献[2]中对机构运动进行了基于D-H法的运动学反解计算,得到了在MATLAB中计算出的各关节转角,针对于φ88.9 mm型钢管包模型,三个关节转过的角度分别125.22°,-55.71°,-110.49°,利用STEP函数结合D-H法求出的关节角度编写出六个关节的转角函数。

(1)
根据式(1)中的六个STEP函数,在Adams中完成关节驱动函数的设计。
2.2.2 打捆机械手仿真结果的处理
在ADAMS/PostProcessor后处理模块中对机构仿真结果进行分析,将机构仿真运行后的参数输出为曲线图表的形式,通过这些曲线图可以直观地观察到各个仿真参数与运行时间之间的关系。因为左右两侧机械臂的运动相同,因此本文只研究右侧三机械臂关节的运行结果。
(1)关节角速度-时间图像。关节角速度是在对机器人进行运动学分析时非常重要的参数,因此在对打捆机械手进行仿真分析后需要对各关节的角速度进行深入分析。在后处理模块得到各关节z方向旋转角速度-时间图像如9所示。
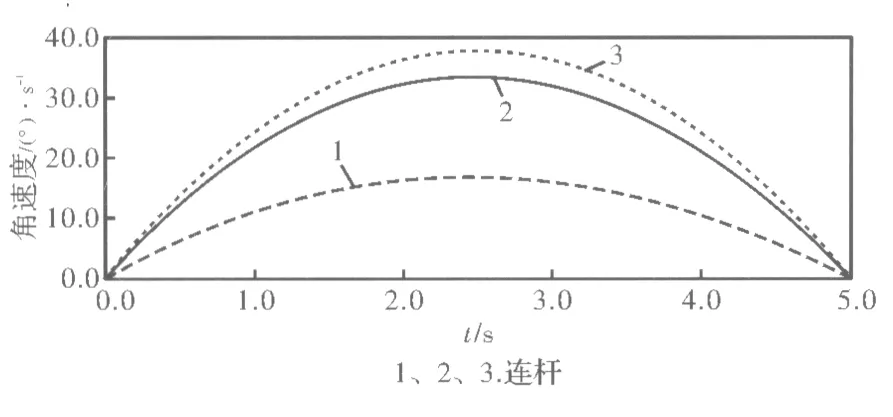
图9 三连杆关节角速度曲线图
由图9中可得三个关节的角速度曲线运行的比较平稳,打捆过程中机械臂运行轨迹合理,未触碰到钢管,运行中三机械臂相互之间也未发生干涉,且最终完成了对钢管包的打捆,因此由运动学公式所求得的运动规律符合实际的任务要求。三个关节角速度都在2.5 s时达到最大值,在数值上最大值分别为37.64 (°)/s、17.01 (°)/s、33.38 (°)/s,平均速度分别为24.97 (°)/s、11.28 (°)/s、22.14 (°)/s,为后续对杆长进行优化提供了所需数据。
(2)关节角加速度-时间图像。关节角加速度是在对机器人进行运动学分析时不可或缺的重要参数,可以直观地反映各关节的运动特性,角加速度曲线的变化也可以体现出机构的振动情况,对于机构的整体运行情况有着重要意义。各关节的角加速度图像如图10所示。

图10 末端执行杆关节角加速度
对各关节角加速度图像进行分析可以得到,角加速度整体变化较为稳定,虽然初始阶段都有一定的突变,但在此前已经完成对于钢带的抓取,并不影响整个机械手的打捆任务,且运行曲线末端并没有波动现象。对整个机械手各关节的速度与加速度的分析可知,由D-H法编制的关节驱动函数比较适合整个机械手的打捆任务,而且运行过程也没有较大的振动,符合预期目标[11]。
2.2.3 运动学方程的验证
参考文献[2]中的运动学分析对打捆机械手末端位移与各个关节变量之间的关系进行了理论验证,进而可以根据ADAMS的仿真和后处理功能,进一步对打捆机械手运动学方程的解进行验证。根据运动学公式的理论推导过程,末端抓取机构z方向的位移始终为零,因此只要已知各关节任意时刻的θ′角就可以求出末端抓取机构的位姿px、py。在Adams中添加各关节的转角和末端抓取机构的横纵坐标变化到同一张曲线图,如图11所示。

图11 各关节转角与机械手末端位移曲线图
如图11中所示,横轴表示时间,左纵坐标为关节旋转角度,右纵坐标为末端抓取机构的位移,从图中既可以读出各关节的旋转角度也可以读出末端抓取机构的位姿。这样就可以利用图11的数据来验证运动学方程的正确性,即在仿真的任一时刻,都可以利用各关节旋转角求出末端位姿,也可以利用末端位姿求出各关节旋转角。例如在2 s时,φ1=-44.16°,φ2=19.96°,φ3=39.16°,px=685.93 mm,py=338.43 mm,可得θ1′=3.6°,θ2′=81.03°,θ3′=75.95°,进而求得px=683.27 mm,py=337.15 mm,仿真值与理论值误差在允许范围内。通过对图11的分析可知,D-H法建立的运动学公式是正确的,符合实际情况[2、12]。
2.2.4 打捆机械手关节驱动力矩分析
对打捆机械手进行仿真运行后可以在Adams/PostProcessor中读出各关节驱动力矩的变化。图12是在忽略关节运动副间摩擦力的前提下,关节驱动力随时间的变化曲线,通过对关节驱动力的分析,可以为关节驱动部件的选型提供可靠依据。
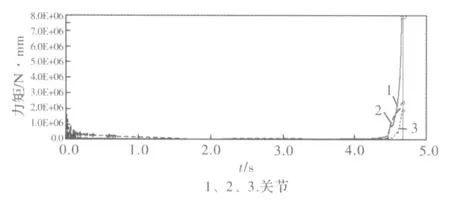
图12 三关节驱动力矩曲线图
图12中横轴表示时间,纵轴表示各关节的驱动力矩值,图12中各关节在初始阶段都有一定的波动现象,是设备受到的惯性力引起的冲击。由参考文献[2]中的分析可知,新型打捆机械手驱动部件是根据静力学分析进行初步选型的,选型时的参数多数是经估算得到的,会造成一定的误差,因此应根据仿真时的具体数值选出更为适合打捆设备的驱动部件,由图中可以读出各关节的最大力矩值。将两套设备打捆各自最大包型时的各关节最大力矩值汇总到表3中,为后续驱动部件的进一步选型提供了精确的数据参考。

表3 各关节最大力矩值
3 结论
本文以外径φ88.9 mm的六角钢管包作为主要研究对象,针对设计出的打捆机械手简图,使用Soildworks和Adams联合建模,通过新型钢管打捆机械手的三维实体模型,在Adams软件中利用建立的运动函数对模型进行了仿真分析,仿真过程中各杆件运行平稳,且相互之间无干涉,通过关节驱动函数的作用最终完成对钢管包的打捆。通过仿真实验,验证了机械结构和运动学驱动函数的合理性,根据仿真结果的各关节力矩变化,为各关节驱动部件的选型提供了参考数据。
