无人水下航行器声通信系统设计与应用
2018-11-09温梦华孙宗鑫池庆玺李志强
马 璐, 温梦华, 乔 钢, 孙宗鑫, 池庆玺, 李 珊, 李志强
无人水下航行器声通信系统设计与应用
马 璐1,2,3, 温梦华1,2,3, 乔 钢1,2,3, 孙宗鑫1,2,3, 池庆玺4, 李 珊4, 李志强4
(1. 哈尔滨工程大学 水声技术重点实验室, 黑龙江 哈尔滨, 150001; 2.海洋信息获取与安全工信部重点实验室(哈尔滨工程大学), 工业和信息化部, 黑龙江 哈尔滨, 150001; 3. 哈尔滨工程大学 水声工程学院, 黑龙江 哈尔滨, 150001; 4. 北京机电工程研究所, 北京, 100074)
声波是迄今为止人类发现的唯一能在水下远距离传播信息的载体, 为了对无人水下航行器(UUV)进行遥控和监测, 建立一条UUV和水面指挥平台之间的无线通信链路, 文中设计了一套UUV通信系统, 该系统采用声波作为载体实现远距离无线通信。由于水声信道具有明显的多径干扰、多普勒频偏等特性, 该系统采用非相干多载波频移键控(MFSK)技术保证声通信链路的稳定性。为了进一步加强遥控指令、状态信息等的可靠传输, 采用停止等待自动要求重发(ARQ)协议对通信过程进行差错控制。所有控制算法均在低功耗数字信号处理器(DSP)硬件平台下实时实现。通过南海试验测试, 验证了该系统的实用性和稳定性。
无人水下航行器; 水声通信; DSP硬件平台; 多载波频移键控; 停止等待ARQ协议
0 引言
当今世界, 各国对海洋资源的开发越来越重视, 各种型号和用途的无人水下航行器(underwater unmanned vehicle, UUV)也进入了飞速发展的时期, 当前UUV主要分为遥控水下航行器(remotly operated vehicle, ROV)和自主水下航行器(autonomous underwater vehicle, AUV)2种[1],而ROV使用有缆遥控居多, 使用无缆遥控的少。文献[2]提出了一种基于以太网协议的光纤通信系统。美国伍兹霍尔海洋研究所(Woods Hole Oceanographic Institution, WHOI)研制的“海神”号也是通过光纤微缆与水面母船建立实时通信连接[1], 但是光纤通信等有缆通信系统不适合用于远距离和复杂地形, 其活动范围和自由度会受到限制。文献[3]、[4]和专利[5]采用的是无线电通信系统, 但是无线电在水中无法远距离传播, 也无法胜任在水下作业的UUV的通信需求。2010年, 法国海洋研究所研制成功的“阿丽亚娜”号UUV当以自主方式运行时, 可通过水声通信将采集到的数据传至水面[1], 文献[6]和文献[7]中设计的UUV都采用的是水声通信, 其中, 文献[6]使用差分脉冲位置调制技术, 这种调制技术抗多径能力差, 不适合用于多径效应明显的水声信道中, 文献[7]采用正交频分复用(orthogonal frequency division multiplexing, OFDM)通信技术, 该技术一般适用于数据帧长长、对通信速率要求高的场合。然而在水下, UUV的控制信号往往比较短, 对通信速率要求不高, 但对通信的稳健性要求比较高, 这种情况更适合用低速、稳健、复杂度低的水声通信技术, 所以文中把多载波频移键控(multiple frequency shift keying, MFSK)水声通信技术用于水下UUV通信系统, 是对当前现有的几种水下UUV通信系统的一个很好的改进。
文中设计的UUV通信系统以数字信号处理器(digital signal processor, DSP)作为硬件平台, 采用MFSK通信技术[8-9]和停止等待自动要求重发(automatic repeat request, ARQ)协议[10-11], 可以实现水面指挥平台和UUV之间的通信连接建立、操作指令传输、任务数据装订、位置状态上报以及通信机参数设置等多种功能, 可以全方位地对UUV进行遥控和监测。
1 系统设计概述
该系统的功能主要是建立水面指挥平台和UUV之间的通信链路, 分为水上机和水下机, 水上机位于水面船或岸基, 如图1(a)所示, 可连接 PC (personal computer)机进行操作指令的下发和UUV状态信息显示。水下机位于UUV舱体内, 如图1(b)所示, 可与UUV内部综合控制平台进行信息交互。
水面指挥平台把要发送的控制指令通过串口发送给水上机, 水上机通过MFSK调制方式把串口收到的指令调制成能够在水声信道中传输的带通信号, 并通过数模转换器(digital-to-analog converter, DAC)、功放、换能器转换成声信号发送出去, 水下机会通过换能器、前放、模数转换器(analog-to-digital converter, ADC)把接收的声信号转换成数字信号, DSP对接收的数字信号进行解调和解码处理, 获得水面指挥平台通过水上机给水下机发送的指令, 并把指令发送给UUV。这样, UUV就收到了水面指挥平台的指令, 达到了遥控的目的。同理, UUV也可以用同样的方式通过水下机给水上机发送位置状态数据包, 达到了监控的目的。系统结构框图如图2所示。
系统功能主要分为以下几个方面。
1) 通信连接建立(测距)
指挥平台在发送数据前建立起和UUV的通信链路, 检测UUV之间是否在正常的通信范围内, 以及信道条件是否良好。同时, 水上机会根据测出的声信号传输延时来测量水面指挥平台和UUV之间的距离(测距方法详见第3.3节)。
2) 操作指令传输
水面指挥平台把要控制UUV执行的操作指令(例如开始游动等)发送给UUV, 操作指令一般比较短。
3) 任务数据装订
水面指挥平台把一些执行任务相关的较长数据(例如游动路线轨迹等)发送给UUV, 和操作指令相比, 任务数据装订发送的数据包比较长。
4) 位置状态上报
UUV周期性地把自己的位置状态发送给水面指挥平台, 以便其实时地对它进行监控。
5) 通信机参数设置
设置通信机的发射信号幅度和前放接收增益, 在不同的通信距离和通信环境下, 可以给通信机设置合适的参数。
该系统全面考虑了长指令和短指令的传输、控制信号和监测信号的传输等各种不同的情况, 能满足UUV遥控领域的各方面需求。除此之外, 其还考虑了UUV设备的低功耗需求, 所以, 处理器平台采用低功耗TMS320C6748, 功耗可低达0.49 W, 是业界功耗最低的浮点型DSP。
2 多载波MFSK通信技术
水声信道具有严重的多径干扰和多普勒频偏等问题, OFDM可以有效克服多途干扰, 但易受到多普勒频偏的影响, 且所需接收信噪比较高[12-14]。非相干MFSK通信方式虽然通信速率上性能一般, 但是通信质量稳定可靠[15-16]。而多载波MFSK通信很好地兼容了以上2个特点: 利用多载波特点将符号周期加长, 在不过分降低通信速率的同时, 利用循环前缀克服码间干扰影响; 同时, 带宽内占用的多个有效频点相邻间隔较大, 具有一定的多普勒频偏容限, 因此达到了通信速率和稳定性的折中。
多载波MFSK水声通信技术的基本原理和框图如图3所示, 在发送端将输入比特流经过编码之后, 作为频域信息, 利用傅里叶反变换调制到一定带宽的多个子载波上并进行传输, 得到发送的时域波形。在接收端利用傅里叶变换将叠加在一起的时域波形信息转化到频域进行处理, 结合Hadamard(20,5)码字, 计算出每5 bit的对数似然比软信息,然后进入信道译码器得到比特流信息。
2.1 Hadamard-OOK-IFFT技术
交织之后的比特流要进行基带上的数字调制, 然后上变频到通带, 之后发射出去。该设计利用Hadamard-OOK-IFFT技术进行调制, Hadamard码的码字中0和1的个数相同, 能够在低信噪比下提高编码增益, 赋予水声通信系统更强的抗噪声、抗衰落性能。该系统采用的是Hadamard(20,5)码字格式, 即将交织后每5 bit映射成20 bit。然后将映射后的比特流放置于通带信号相应频点上, 通过逆快速傅里叶变换(inverse fast Fourier transform, IFFT)即得到时域波形, 完成了调制过程。原理图如图4所示。
2.2 多普勒估计与补偿
设计水声多载波MFSK通信帧结构如图5所示。

3 停止等待ARQ协议
由于水声信道的复杂性, 水声通信链路的稳定性相对于陆地无线电通信较差。所以, 建立1个接收端向发送端的通信结果反馈机制极为必要, 文中系统采用停止等待ARQ协议。
3.1 协议描述
发送端每发送一个数据包后, 都会等待接收端的确认(acknowledgement, ACK)回复, 收到正确的ACK之后, 才能发送下一个数据包。如果在规定的等待时间内没收到接收端回复的ACK, 或者收到校验错误的ACK, 发送端都会重传。程序流程图如图6所示。
通过这种反馈重传机制, 发送端可以通过接收端反馈的通信结果来判断通信是否成功, 当通信不成功时, 可以自动进行重传, 多次重发的成功率必然会比一次发送的成功率高, 所以, 文中系统通过停止等待ARQ协议可以进一步提高通信的可靠性。
3.2 帧结构
数据包由一个发送请求(request to send+, RTS+)控制帧和若干个数据帧组成, 应答包由ACK控制帧组成[17], 如图7所示。
数据包中的RTS+控制帧包含发送序列号、数据包类型、数据包帧数、数据包比特长度等信息, 如图8所示。其中, 控制包类型的作用是标识控制包是RTS+还是ACK, 此位是1代表RTS+, 是0代表ACK。
发送序列号的作用是识别一条指令是否重发, 重发数据包的发送序列号相同, 这样就可以避免一条指令被接收端重复响应。
数据包类型的作用是标识第1节中提到的不同功能下发送的数据, 包括通信连接建立、操作指令、数据装订、位置状态上报和参数修改。
数据包帧数的作用是标识数据包被调制的帧数, 物理层的解调算法需要用到这个信息。
数据包比特长度的作用是标识数据包承载的比特数, 在通信机与水面指挥平台或UUV的通信协议中, 需要用到此信息。
应答包的ACK控制帧包含校验结果、应答延迟、信噪比和信道评价等信息。如图9所示。
校验结果的作用是接收端向发送端反馈校验结果, 如果校验错误发送端会重传。
应答延迟的作用是标识接收端自收到全部数据包的时间到发出ACK应答包的时间之差, 发送端可以根据此信息来计算发送端到接收端的距离。
信噪比和信道评价的作用是接收端根据收到的信号向发送端反馈信道的情况, 用以辅助发送端调整通信参数。
3.3 延时时间计算
发送端发出数据包之后, 开始计时并等待接收端应答ACK信号, 收到ACK信号之后就可以利用所计的时长来计算发送端到接收端的距离, 如果收不到ACK, 也不能无限制地等待下去, 所以需要计算最长的等待时间。当超过最长等待时间后, 就认为此次发送失败, 需要重发。
所以, 发送端在发送完数据包之后的等待应答时间为


4 试验验证
该系统选用的多载波MFSK通信参数如表1所示。该系统于2018年4月在三亚日月湾海域进行了距离100 m的功能测试, 2级海况, 水上机给水下机发送数据包, 水下机的接收信号时域波形图如图11所示。

表1 多载波MFSK通信参数列表
接收信号的信噪比较高, 约为13 dB, 用接收的帧头LFM估计得到信道冲激响应如图12所示。
从图11可以看出, 接收信号有因多径反射引起的严重拖尾现象。从图12可以看出信道的多径时延扩展约50 ms。
以MFSK信号前60个子载波为例对多径衰落影响进行分析。水声MFSK信号发射和接收子载波幅度对比如图13所示。
从图13可以看出, 经历了接近50 ms的多径时延扩展信道后, 接收的MFSK信号的前60个子载波发生了不同程度的衰落, 尤其在图中圆圈内的子载波发生了深度衰落, 如果直接采用门限硬判决会导致解码错误。而该系统通过计算接收子载波处的对数似然比软信息, 并利用Hadamard (20,5)码字和1/2码率信道编码的纠错能力, 提升了MFSK信号的抗多径、抗噪声能力, 处理后的误码率为0。
比较采用停止等待ARQ协议与不采用停止等待ARQ协议的结果如下:
停止等待ARQ协议可以在数据包发送失败之后自动重发, 可以提高数据传输的可靠性, 在距离100 m, 2级海况下, 共进行了12个数据包的传输试验, 其中某个数据包在第一次传输时解调错误, 但可通过停止等待ARQ协议进行重传, 使数据包在重传过程中传输成功; 而如果不采用停止等待ARQ协议, 该数据包就无法传输成功。表2比较了采用停止等待ARQ协议与不采用的效果。
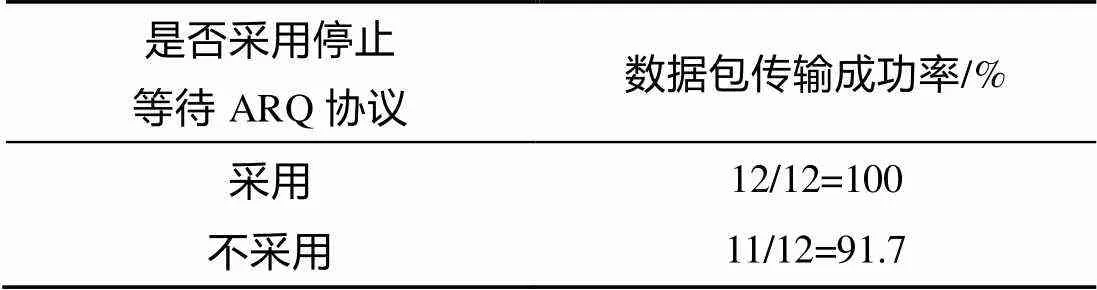
表2 停止等待ARQ协议效果分析表
由表2可知, 采用停止等待ARQ协议可以提高通信成功率。
此外, 在1 km距离, 3级海况下进行了20个数据包传输试验, 有4个数据包在首次传输时出现错误, 则不采用停止等待ARQ协议的数据包传输成功率为16/20=80%, 若采用, 则传输成功率可达100%。
5 结束语
文中设计了一种UUV声通信系统, 具有通信连接建立、操作指令传输、任务数据装订、位置状态上报和通信参数设置等5种功能, 实现了对UUV的遥控和监测。该系统采用的多载波MFSK通信技术可以有效克服多途干扰, 通过停止等待ARQ协议又可以进一步提高通信系统的可靠性。最后通过外场试验数据验证了该系统在多途效应比较严重的情况下仍然能够达到较高的通信成功率。在以后的工作中, 拟扩展水下自组织网络协议, 从而可以实现对UUV编队的遥控及编队内部的自主协同[19]。
[1] 李一平, 李硕, 张艾群. 自主/遥控水下机器人研究现状[J]. 工程研究-跨学科视野中的工程, 2016, 8(2): 217-222.Li Yi-ping, Li Shuo, Zhang Ai-qun. Research Status of Autonomous & Remotely Operated Vehicle[J]. Journal of Engineering Stadies, 2016, 8(2): 217-222.
[2] 郭威, 崔胜国, 赵洋, 等. 一种遥控水下机器人通信系统[J]. 电气自动化, 2008, 30(5): 34-35.Guo Wei, Cui Sheng-guo, Zhao Yang, et al. A Kind of Communication System in Underwater ROV[J]. Electrical Automation, 2008, 30(5): 34-35.
[3] 曾俊宝, 李硕. 水下机器人便携式遥控单元设计[J]. 微计算机信息, 2010, 26(2): 132-133.Zeng Jun-bao, Li Shuo. The Design of UUV Portable Remote Control Unit[J]. Control & Automation, 2010, 26(2): 132-133.
[4] 郭晶. 潜水器用远程遥控系统研究[D]. 大连: 大连海事大学, 2010.
[5] 河海大学. 自主导航式水下机器人运行异常自检及数据传输系统: CN102999047A[P]. 2013-03-27.
[6] 饶芊. 水下机器人控制与通信系统研究[D]. 杭州: 浙江大学, 2008.
[7] 何永江. 水下机器人通信系统设计与实现[D]. 成都: 电子科技大学, 2013.
[8] Scussel K F, Rice J A, Merriam S. A New MFSK Acoustic Modem for Operation in Adverse Underwater Channels[C]//Oceans’97. MTS/IEEE Conference Proceedings. Halifax: IEEE, 2002: 247-254.
[9] Cai X, Wan L, Huang Y, et al. Further Results on Multicarrier MFSK Based Underwater Acoustic Communications[J]. Physical Communication, 2016, 18(P1): 15-27.
[10] Lin S. Automatic-repeat-request(ARQ) Error-Control Schemes
[J]. IEEE Communications Magazine, 1984, 22(12): 5-17.
[11] Zorzi M, Rao R R, Milstein L B. ARQ Error Control for Fading Mobile Radio Channels[J]. IEEE Transactions on Vehicular Technology, 1997, 46(2): 445-455.
[12] Li Y, Cimini L J J, Sollenberger N R. Robust Channel Estimation for OFDM Systems with Rapid Dispersive Fading Channels[J]. IEEE Transactions on Communications, 1998, 46(7): 902-915.
[13] Ma L, Zhou S L, Qiao G, et al. Superposition Coding for Downlink Underwater Acoustic OFDM[J]. IEEE Journal of Oceanic Engineering, 2017, 42(1): 175-187.
[14] Ma L, Qiao G, Liu S Z. A Combined Doppler Scale Estimation Scheme for Underwater Acoustic OFDM System[J]. Journal of Computational Acoustics, 2015, 23(4): 1540004.
[15] 覃杰莉. 水声通信系统多载波MFSK技术设计与实现[D]. 哈尔滨: 哈尔滨工程大学, 2009.
[16] 吴翊洲, 周新志. 一种多载波MFSK信道编码方案[J]. 通信技术, 2011, 44(2): 6-9.Wu Yi-zhou, Zhou Xin-zhi. A Multicarrier MFSK Channel Coding Scheme[J]. Communications Technology, 2011, 44(2): 6-9.
[17] 王季煜, 朱敏. 区域性海洋观测水声通信网数据链路层研究[J]. 声学技术, 2011, 30(4): 373-378.Wang Ji-yu, Zhu Min. A Study and Simulation of Data Link Layer Protocols for Underwater Acoustic Networks of Area Monitoring[J]. Technical Acoustics, 2011, 30(4): 373-378.
[18] 汪安民, 周慧, 蔡湘平. TMS320C674xDSP应用开发[M]. 北京: 北京航空航天大学出版社, 2012: 224-227.
[19] 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106.Shen Xin-rui, Wang Yan-hui, Yang Shao-qiong, et al. Development of Underwater Gliders: An Overview and Prospect[J]. Journal of Unmanned Undersea Systems, 2018, 26(2): 89-106.
Design and Application of Acoustic Communication System for Unmanned Undersea Vehicle
MA Lu1,2,3, WEN Meng-hua1,2,3, QIAO Gang1,2,3, SUN Zong-xin1,2,3, CHI Qing-xi4, LI Shan4, LI Zhi-qiang4
(1. Acoustic Science and Technology Laboratory, Harbin Engineering University, Harbin 150001, China; 2. Key Laboratory of Marine Information Acquisition and Security(Harbin Engineering University), Ministry of Industry and Information Technology, Harbin 150001, China; 3. College of Underwater Acoustic Engineering, Harbin Engineering University, Harbin 150001, China; 4. Beijing Research Institute of Mechanical & Electrical Technology, Beijing 100074, China)
To remotely control and monitor an unmanned undersea vehicle(UUV), it is necessary to establish a communication link between the UUV and the surface control platform. In this study, a telecommunication system adopting acoustic wave as the carrier is designed for the UUV. Because the underwater acoustic channel has the significant characteristics of multipath interference and Doppler shift, this system uses incoherent multi-carrier frequency shift keying (MFSK) technology to ensure the stability of acoustic communication link. In order to further strengthen the transmission reliability of telecontrol instruction and status information, the stop-and-wait automatic repeat request(ARQ) protocol is used for error control. All of the control algorithms are timely realized on the low-power digital signal processor(DSP) hardware platform. Tests in South China Sea verify the practicability and stability of the present system.
unmanned undersea vehicles(UUV); underwater acoustic communication; digital signal processor(DSP) hardware platform; multi-carrier multiple frequency shift keying(MFSK); stop-and-wait automatic repeat request(ARQ) protocol
TJ630.34; U674.941; TN929.3
A
2096-3920(2018)05-0449-07
10.11993/j.issn.2096-3920.2018.05.012
2016-11-19;
2016-12-18.
国家自然科学基金项目(61431004, 61601136, 61501134).
马 璐(1987-), 女, 博士, 副教授, 主要研究方向为水声通信技术.
马璐, 温梦华, 乔钢, 等. 无人水下航行器声通信系统设计与应用[J]. 水下无人系统学报, 2018, 26(5): 449-455.
(责任编辑: 许 妍)
