海洋声学目标探测技术研究现状和发展趋势
2018-11-09杨益新韩一娜赵瑞琴刘雄厚
杨益新, 韩一娜, 赵瑞琴, 刘雄厚, 汪 勇
海洋声学目标探测技术研究现状和发展趋势
杨益新, 韩一娜, 赵瑞琴, 刘雄厚, 汪 勇
(西北工业大学 航海学院, 陕西 西安, 710072)
海洋声学目标探测——这一覆盖甚广的研究领域, 其具有多种研究思路和技术途径, 而利用水声通信组网技术将主被动探测节点连接成水声探测网络, 并对获取的多源信息进行融合, 是海洋声学目标探测技术发展的重要途径之一。基于此, 文中分别从被动探测技术、主动探测技术、水下通信组网和多源信息融合4个方面, 对海洋声学目标探测技术的发展脉络进行梳理, 介绍了相关理论方法的特点, 指出了各自的优缺点, 同时阐述了海洋声信道对目标探测的影响。最后, 从以上4个方面对海洋声学目标探测技术的未来发展趋势进行了展望: 被动探测技术从空域处理角度出发, 将会朝着大孔径阵列的稳健阵列处理技术、新型传感器及其阵列的研制, 以及信号处理与水声物理模型的充分结合这3个方面发展; 主动探测技术则会继续发展低频大功率探测技术、多基地组网探测技术和新体制主动探测技术, 同时智能化主动探测技术和生态友好型主动探测技术也将是其发展趋势; 水下通信组网技术未来将侧重发展如何利用网络协议提高通信可靠性、跨介质组网协议、面向任务的网络资源调度以及标准化水声网络实验平台建设; 多源信息融合探测技术则更多的是要进一步深入进行测量信息与信息间互补关系的建模研究。
声学目标探测; 被动声呐; 主动声呐; 水声通信; 信息融合
0 引言
海洋声学目标探测技术对于维护国家主权, 保障国家海洋环境安全, 促进海洋探索与开发至关重要。近年来, 水下目标隐身技术不断进步, 给水声探测技术带来了巨大挑战。针对这一挑战, 低频、移动、多节点水声探测技术日益受到重视, 同时, 探测隐身目标的多源声学网络也应运而生。由此可见, 通过水声通信组网技术将主被动探测节点连接成水声探测网络, 并对获取的多源信息进行融合, 是海洋声学目标探测技术发展的一个重要途径。该文将重点从被动探测、主动探测、水下通信组网和多源信息融合探测等4个方面, 对海洋声学目标探测技术的研究现状和未来发展趋势进行阐述。
1 国内外研究现状
1.1 被动探测技术
海洋声学目标被动探测是应用最为广泛的技术之一, 其主要利用水听器及其阵列接收目标自身辐射噪声或信号, 如潜艇辐射的螺旋桨转动噪声、艇体与水流摩擦产生的流噪声、以及各种发动机机械振动引起的辐射噪声等[1], 同时结合信号处理技术以提取有用信息, 如目标信号特征、方位、距离和深度等。由于被动探测系统本身并不发射信号, 所以目标不易察觉其存在, 具有较强的隐蔽性。
水听器及其阵列构成了被动探测的硬件基础, 而被动声呐系统则是水听器及其阵列的主要安装平台, 其形式、尺寸及安装形式等都对信号接收产生直接影响; 信号处理部分则构成了软件基础, 决定了信息提取的有效性, 是被动声呐系统的大脑。硬件和软件基础共同决定了被动探测技术的性能。
1.1.1 典型被动声呐平台
典型被动声呐平台主要包括岸基平台、舰船与潜艇平台以及航空飞行器平台, 其包含的水听器主要有标量的声压水听器和矢量水听器[2-3]2种, 阵列形式可分为线型、面型和体积型, 实际中可依据不同的应用环境选择不同的阵型。
岸基声呐是固定式水声监听系统的一种, 一般以海岸为基地, 在大陆架或者海岛周边大型布放水下基阵, 用于警戒和监视海峡、港口、航道以及敏感水域的敌方水下潜艇活动, 是反潜预警系统的重要组成部分。一般由线性水听器基阵、海底电(光)缆、岸上终端电子设备以及电源系统等组成。岸基声呐中较为典型的是美国在冷战时期部署的声音监控系统(sound surveillance system, SOSUS), 该系统采用子阵技术, 将一条长线阵分成2~3个子阵单独处理, 再结合起来进行波束形成, 从而得到较窄的波束和更好的指向性。
船用被动声呐主要包括拖曳阵声呐和舷侧阵声呐等。其中拖曳阵声呐具有2个显著的特点: 基阵孔径不受舰(艇)空间尺度的限制, 可比一般的舰(艇)载声呐基阵孔径大1个数量级以上, 因而它在极低频段仍有较高的空间增益, 适合在低频工作; 基阵远离其拖曳平台, 并可选择在最有利的深度工作, 背景干扰大为减小, 传播条件相对有利。基于这两大特点, 拖曳阵声呐与其他常规声呐相比, 探测能力大为提高。拖曳阵声呐作为平台声呐中工作频率最低、作用距离最远的设备, 已经成为舰船的主要声呐装备之一[4], 典型的有美国潜用粗线拖曳阵声呐TB-16(相对于直径小于40 mm的细线阵而言), 以及后续改进的细线型TB-29A[5], 如图1所示[6]。
航空声呐是海军反潜直升机和反潜巡逻机的主要反潜探测设备。用于搜索、识别和跟踪潜艇, 保障机载反潜武器的使用或引导其他反潜兵力实施对潜攻击, 主要分为吊放式声呐和声呐浮标系统2种[7]。
吊放式声呐装备于反潜直升机, 一般采取跳跃式逐点搜索。当直升机飞临某一探测点, 低空悬停, 将换能器基阵吊放入水至最佳深度, 以主动或被动方式全向搜索; 对某一点搜索完毕后, 即将基阵提出海面飞向另一探测点搜索。典型的吊放声呐有法国的FLASH[8]和美国的HELRAS系统[9], 其被动接收水听器基阵均是体积型阵列, 如图2所示。
声呐浮标是一种抛弃式航空声呐系统, 一般装备于固定翼反潜飞机上, 包含浮标投放装置、无线电信号接收机和信号处理显示设备等。使用时, 反潜机先将浮标组按一定的阵式投布于搜索海区, 然后在海区上空盘旋以接收由不同浮标经无线电调制发射的目标信息。典型的声呐浮标有澳大利亚的BARRA[10]和美国的ADAR系统[11], 前者包含的水听器阵列是一个5×5的多环平面阵(见图3), 后者则包含一个40元的体积型水听器基阵。
1.1.2 被动信号处理技术
被动探测中, 信号处理技术的主要任务是利用各种技术手段提高输出信噪比, 将目标信号从噪声和干扰中区分开来, 进而实现水下目标的检测、定位和识别。现阶段, 提高信噪比主要有时域、空域处理和后置处理等技术途径。限于篇幅, 文中将主要从空域处理的角度进行介绍。
1) 波束形成技术
波束形成是被动声呐系统中的重要部分, 其功能主要有: 抑制环境噪声, 提高输出信噪比; 实现对目标信号波达方向的估计; 检测和分辨多个不同方位到达的平面波信号。波束形成技术主要包括数据独立和自适应波束形成两大类[12]。
① 数据独立波束形成技术
数据独立波束形成方法的权值向量是固定的, 不随接收数据的变化而变化, 其形成的波束响应同样是固定的。延迟求和方法以及各种加窗处理技术[13]都是具有代表性的固定权值波束形成方法, 如Chebyshev窗、Hanning窗和Hamming窗等。在数据独立波束形成方法中, 获取更高的指向性, 以提高检测微弱信号和分辨紧邻目标的能力, 一直是其主要的研究方向, 由此催生出了“超指向性”方法[14]。Doclo和Crocco等[15-16]提出和完善了一种基于误差统计特性的超指向性方法, 该方法通过引入误差统计特性, 提高了超指向性方法的稳健性。Meyer等[17-18]较早针对球形和圆环形阵列提出了基于相位模态理论的波束形成方法, 从另一个角度获得了超指向性的解。针对理想圆环阵, 马远良等[14, 19-20]提出的一种特征波束分解与综合模型, 能够提供超指向性的精确闭式解, 更利于工程实现。随后, 汪勇等[14, 21]针对任意阵型提出了Gram-Schmidt模态波束分解与综合超指向性模型, 同样给出了超指向性的精确闭式解。此外, 利用各种优化方法提出的波束形成方法[22-24], 可以灵活地在指向性、稳健性、主瓣宽度和旁瓣级等性能之间折中, 获得满足不同要求的优化波束。
② 自适应波束形成技术
自适应波束形成技术, 也可称之为数据驱动波束形成技术, 其权值向量随接收数据的变化而自适应调整, 所获得的波束响应也随之变化。自适应波束形成器可以在干扰方位自适应产生凹槽, 从而提高信干噪比(signal to interference and noise ratio, SINR), 其中最典型的是Capon于1969年提出的最小方差无失真响应(minimum variance distortionless response, MVDR)波束形成技术[25]。该技术在保持波束指向方向信号无失真的条件下, 通过使基阵输出功率最小来实现对干扰的有效抑制, 具有较好的方位分辨能力和较强的干扰抑制能力。然而, MVDR方法的稳健性较差, 当出现阵列流形误差时, 如波达角(angle-of-arrival, AOA)误差[26-27]、阵形校准误差[28]、平面波假设的失配[29]等, 其性能会急剧下降。为了减小MVDR方法对各种误差失配引起的性能下降, 人们提出了各种稳健算法, 而对角加载类方法是最常用的一种。Cox等[30]最早通过增加白噪声增益的方法推导出对角加载算法的表达式, 提高了MVDR波束形成器对阵列流形误差的稳健性。白噪声增益约束方法和另一种常见的加权值范数约束方法[31], 均可等效为对角加载方法。然而, 对角加载算法很难给出合适的对角加载量的值, 从而给该方法的实用带来一定的限制。Vorobyov[32], Li[33-35]、Lorenz[36]和Kim[37]等先后提出了基于阵列流形不确定集来选取参数的稳健波束形成方法, 其中阵列流形的不确定集上限取值具有明确物理意义, 较对角加载算法中对角加载量的选择更加容易。
2) 方位估计技术
基于传感器阵列的方位估计(direction of arrival, DOA)技术是被动声呐的重要研究内容, 目前主要的方位估计方法可以分为以下3类: 波束扫描类算法、子空间类算法和稀疏信号处理类算法。
①波束扫描类方位估计算法
常用的方位估计技术主要有波束形成方法和高分辨方位估计方法。最早的基于阵列的DOA算法为常规方法[38], 也称为Bartlett方法。由于常规方法易于实现、稳健性好及对信号之间的相干性不敏感, 很多声呐系统均采用此种技术预成多波束来实现对目标方位的估计。但常规方法的角度分辨能力受瑞利极限的限制[38], 无法分辨2个在方位上靠得较近的信号源。
②子空间类方位估计算法
自20世纪70年代以来, 空间谱估计研究方面涌现出大量文献, 这些理论克服了方位分辨的瑞利准则, 获得了超过常规方法的方位分辨能力。其中以美国的Schmidt等[39]提出的多重信号分类(multiple signal classification, MUSIC)算法最为著名, 它的提出促进了特征子空间类算法的兴起。这类算法的共同特点是通过对阵列接收数据特征分解或奇异值分解等, 将接收数据划分成2个相互正交的子空间, 即信号子空间和噪声子空间。子空间分解类算法从处理方式上可分为2类: 一类是以MUSIC为代表的噪声子空间算法, 另一类是以旋转不变子空间(estimation of signal pa- rameters via rotational invariance techniques, ESPRIT)[40-41]为代表的信号子空间类算法。MU- SIC算法是利用导向矢量与噪声子空间的正交特性, 而ESPRIT算法则是利用数据协方差矩阵信号子空间的旋转不变特性。与MUSIC算法相比, ESPRIT算法计算量小, 不需要进行谱峰搜索。
③稀疏信号处理类方位估计算法
稀疏信号处理类算法是近十年发展起来的DOA估计算法。此类算法首先将空间扫描方位离散化, 信号分布于有限数目的扫描方位位置上, 没有信号的扫描方位上信号参数为零。通常目标空间方位分布模型具备稀疏性[42], 利用信号的稀疏信息可以提高DOA估计性能。
稀疏信号处理类算法主要包括稀疏信号重构类算法、稀疏协方差拟合类算法和非正则参数或非人工参数类算法。稀疏信号重构类算法如多测量向量的欠定系统局域解法(multiple measurement vectors focal underdetermined system solver, M-focuss)[43]和基于奇异值分解的1范数稀疏方法(1-singular value decomposition,1-SVD)[44], 利用扫描网格点信号波形的l(0<≤1)范数和信号重构模型误差的2范数联合最小化来实现信号方位估计[42]。稀疏协方差拟合类算法如稀疏谱拟合算法(sparse spectrum fitting, SpSF)[45], 其思路与稀疏信号重构类算法一致, 利用基阵输出数据的2阶统计量信息, 通过扫描网格信号功率的1范数和协方差矩阵拟合误差的2范数联合最小化来实现信号方位估计。上述2种算法的共同弊端是均需预先给定正则参数, 然而正则参数很难做到恰当的选择[46]。非人工参数类算法如协方差稀疏迭代估计(sparse iterative covariance-based estimation, SPICE)算法[47-49]和稀疏近似最小方差(sparse asymptotic minimum variance, SAMV)算法[50]并不是从1,2范数联合最优化入手, 而是从最大似然估计的角度, 利用采样协方差与期望信号模型协方差的关系给出信号的参数估计准则, 并在此估计准则下得到扫描网格点的信号功率谱估计, 算法过程无需提供任何正则参数。
对于宽带信号, 波束扫描类方位估计算法如宽带稳健Capon波束形成方法[51], 利用不确定集约束提高有限快拍数量Capon波束形成算法的稳健性, 具有一定高分辨能力; 宽带信号的子空间方位估计算法分为非相干信号子空间(incoherent signal subspace, ISS)算法和相干信号子空间(co- herent signal subspace, CSS)算法[52-53]。ISS算法通过子频带非相干叠加实现宽带信号方位估计, 但只能处理非相干信号; CSS算法将宽带信号映射到某个参考频点上, 再利用窄带子空间类算法估计目标方位, 具有相干信号方位估计能力, 但该算法需提前给出目标方位的预估角度, 且预估角对算法性能影响较大。对于稀疏信号处理类算法,1-SVD算法已经被应用于宽带信号方位估计, 取得较好DOA估计性能[44], 然而2-SVD算法待优化的参数较多, 计算量庞大, 正则参数选取困难; 宽带信号协方差矩阵稀疏表示算法[54]无需将接收信号变换到子带进行处理, 而是利用宽带信号的时延信息和协方差矩阵的稀疏性, 在时域实现目标的方位估计, 但该方法要求入射信号必须具有相同的自相关函数, 从而建立协方差矩阵内部元素与信号时延的线性映射关系, 应用面较窄。
1.2 主动探测技术
主动探测技术所涉及的范围很广, 所探测的目标有潜艇、蛙人、无人水下航行器(unmanned underwater vehicle, UUV)、水雷、沉船等, 据此所使用的频率有几百赫兹、几千赫兹、几十千赫兹、几百千赫兹等。文中主要聚焦于工作频率为几百赫兹到几千赫兹的对潜主动探测技术。
过去几十年来, 潜艇减振降噪技术的发展, 使得潜艇辐射噪声大约以每年平均1dB的速度降低, 这给被动探测技术带来了很大挑战, 同时促使主动水声探测技术得到了足够的重视和充分的发展。
在主动水声探测技术的发展方面, 低频大功率探测技术[55-60]和不断涌现的新式探测技术(双/多基地探测[61-62]、前向散射探测[63]和多输入多输出(multiple-input multiple-output, MIMO)探测[64-66]等)形成了主要的技术发展脉络。
1) 低频大功率探测技术
主动声呐自诞生以来, 就一直向低频大功率方向发展。低频大功率探测技术逐渐成为探潜的主流技术之一, 其核心之一是低频大功率发射换能器技术。国际上, 低频大功率发射换能器已经运用于美国的监视拖曳阵传感器系统(survey- llance towed array sensor system, SURTASS)主被动联合探测系统(见图4)[59]和HELRAS吊放声呐系统(见图2(b))[55]、欧洲Thales公司的CAPTAS系列声呐(见图5)[56, 60]及Atlas公司的LFTAS声呐[56]。SURTASS系统、CAPTAS系列声呐和LFTAS声呐均采用给拖曳线列阵声呐配备低频大功率发射换能器的技术方案, 其中SURTASS系统发射频率范围覆盖100~500 Hz, 声源级可达235 dB。CAPTAS系列声呐采用2只或4只的大功率溢流环换能器组成不同的子型号以满足不同需求, 工作频段可覆盖900~2000 Hz。LFTAS声呐工作频段为1400~2400 Hz。这些系统在使用低频大功率发射换能器或换能器基阵的前提下, 同时采用大孔径拖曳线列阵声呐进行被动接收, 从而获得接收大孔径、深度可变化等优点, 显著提高了探测性能。与拖曳的工作方式不同, HELRAS吊放声呐系统由直升机携带, 工作频段为1000~2 000 Hz, 可单独进行探测, 也可以和浮标等组合, 辅以相应的数据共享与联合处理软件, 从而拓展成双基地、多基地探测系统, 具有灵活的探测方式。这些低频大功率探测声呐代表了目前的国际先进水平。
国内主要由中科院声学所[57]、哈尔滨工程大学[59-60]、杭州应用声学研究所[58]等机构对低频大功率发射换能器技术进行了深入研究, 并已经制作了相应的部分换能器样机。随着低频大功率发射换能器技术逐渐成熟, 将其与拖曳线列阵声呐结合以进行主被动联合探潜, 是我国低频大功率探测技术未来的发展方向之一。
2) 新体制探测技术
在新体制探测技术方面, 主要包括双/多基地探测技术、前向散射探测技术和MIMO探测技术等。双/多基地探测技术和前向散射探测技术具有一定的类似之处, 均可归类为收发分置声呐探测技术。双/多基地声呐探测技术强调声呐发射部分和声呐接收部分相互分离甚至远离, 而前向散射探测技术则进一步要求大分置角下对目标进行探测。为了说明其中的相似和区别之处, 典型的单基地声呐、双基地声呐、多基地声呐和前向散射声呐的发射与接收配置及目标探测示意图如图6所示, 其中T代表声呐发射部分, R代表声呐接收部分。
国际上, 双/多基地探测技术、前向散射探测技术均发轫于欧美等发达国家, 取得了长足的进步。国际上双/多基地探测技术研究较早, 并已经在部分国家得到应用, 如美国的HERALS吊放声呐可以与释放的浮标形成双基地探测模式。加拿大Ultra电子海洋系统公司可以将低频主动拖曳声呐与舰壳声呐、浮标等多种装备进行整合,形成多基地探测模式。在国内, 双/多基地探测技术和前向散射探测技术得到了一定的重视, 有了初步的技术积累并进行了一定程度的工程验证, 但还未形成相关装备。
另一个值得关注的新体制探测技术即MIMO声呐探测技术。MIMO声呐即采用多输入多输出体制的探测声呐, 其可分为分布式MIMO声呐(类似于多基地声呐)和密布式MIMO声呐(类似于单基地声呐)2种[67]。分布式MIMO声呐采用与多基地声呐类似的广域布阵方式获得空间分集增益, 从多个不同方向照射、接收目标回波, 并通过联合处理抑制目标闪烁。密布式MIMO声呐采用与单基地声呐类似的布阵方式, 利用正交发射波形获得波形分集增益, 从而在一定条件下改善对目标的探测性能。
国际上, 以色列的Bekkerman[68]首先给出了MIMO声呐在窄带信号模型下的虚拟阵元坐标解析解, 推导了MIMO声呐的克拉美罗界(CRB: Cramér-Rao Bound), 指出当发射波形完全正交时可获得最优性能。新加坡的Ma[69]研究了频率分集增益, 并设计了最优接收滤波器。在国内, 中科院声学研究所的李宇等[70]指出MIMO声呐可利用空时分集技术获得更好的检测性能。王福钋等[71]采用利用MIMO声呐有效提高了对弱目标的分辨能力。蔡龙等[72]对MIMO声呐的正交波形设计进行了研究。西北工业大学黄建国团队[73-74]对MIMO声呐DOA估计进行了深入研究。刘雄厚等[75]深入研究了MIMO声呐高分辨成像方法。浙江大学的郭小虎等[76]详细研究了MIMO声呐的小目标探测性能。哈尔滨工程大学的张友文等[77]利用MIMO技术提高了声呐抗强干扰的能力。滕婷婷等[78]研究了不同发射信号下MIMO声呐的二维扇扫成像性能。此外, 与MIMO雷达相关的研究成果也可作为MIMO声呐的研究基础, 此处不做过多介绍。
1.3 水下通信组网技术
将水面和水下各种探测平台连接成水声探测网络, 对获取的多源信息进行融合, 是海洋声学目标探测技术发展的一个重要途径。海洋声学目标探测中, 水声通信网络将多探测平台互联, 为不同探测平台间目标特征信息的交互建立传输通道, 同时也为各个探测平台提供地理位置与时间信息。水声通信网络技术是实现水下目标多源声学信息融合探测的关键技术之一。
1.3.1 国外发展现状
水声通信网络的研究起步于20世纪90年代。随着水声通信技术及水声Modem技术的不断发展, 在实现了点对点的实时通信之后, 美国、欧盟、中国和日本等国家和地区相继开始了水声通信网络技术的研究, 诞生了一些具有代表性的研究项目, 典型的如美国的海网(Seaweb)项目和近海水下持续监视网(persistent littoral undersea sur- veyllance network, PLUSNet), 欧盟的研究与开发框架计划(framework programmes for research and technological development)和“地平线2020”计划(horizon 2020)等。
Seaweb项目[79-80]关注水下固定部署节点实际组网的可靠性, 验证长时间部署网络的可行性, 推动了水下通信节点研制和组网技术的发展。
该项目的网络节点分布在100~10 000 km2的范围内, 提供声学通信、探测、定位与导航功能, 由固定的水面浮标节点、水下固定节点和水下移动节点构成自主水下网络系统, 并采用先进的组网协议来完成给定的任务。Seaweb项目早在1998年就开始实际的水下组网试验, 到目前为止已经进行了十几年, 是目前试验时间最长、规模最大的水下网络。Seaweb98’采用多频移键控(multiple frequency-shift keying, MFSK)调制技术、频分多址(frequency division multiple access, FDMA)方式、二叉树形式的拓扑结构和静态路由, 验证了存储转发、自动重传及简单的路由等网络概念。Seaweb99’增加了节点和网关, 增加了运行在网关上的Seaweb服务器。Seaweb98’和Seaweb99’暴露了FDMA方式的不足, 推动了通信节点硬件的改进。Seaweb2000’采用混合码分多址/时分多址(code division multiple access/time division multiple access, CDMA/TDMA)的复用方式, 设计与实现一个紧凑的结构化网络协议, 新增加了协议的控制功能, 通过使用握手方式来避免网络通信中的数据冲突。Seaweb2001’用潜艇作为移动节点, 潜艇不仅能够和Seaweb网络的控制中心通信, 甚至实现了与海上巡逻飞机之间进行通信[81]。Seaweb 2003’~2005’使用1~3个UUV作为移动节点, 如图7所示[82], 与多个固定在水下的节点协同工作。Seaweb 2004’布设了约40个节点, 测试了分布式拓扑结构和动态路由协议。Seaweb2005’还开展了利用固定水下节点为UUV提供导航功能的试验。表1给出了Seaweb2006’~2010’试验的关键技术以及取得的主要成果[83]。
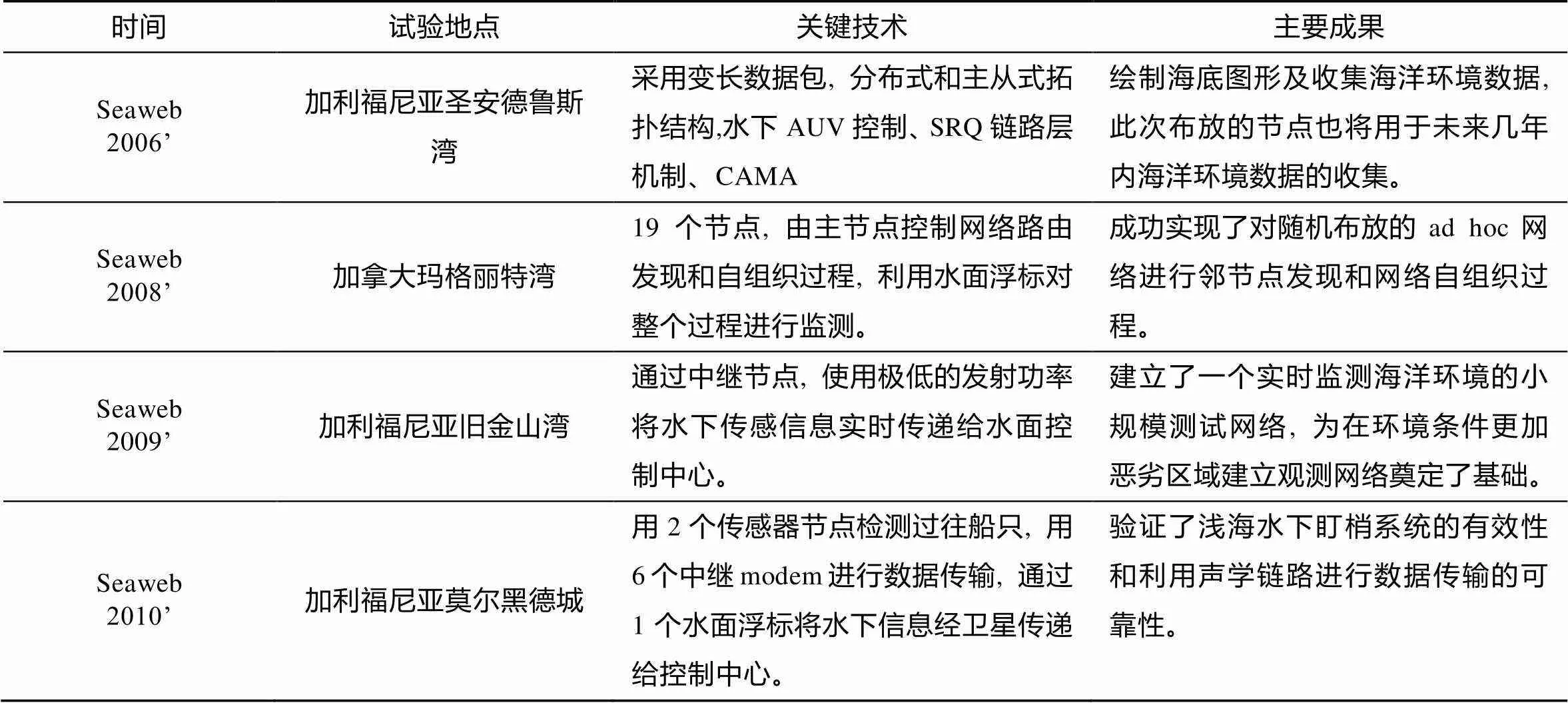
表1 Seaweb试验介绍
Seaweb的成功带动了美国多种水声通信网络应用计划。依据Seaweb的概念, 军事应用上可构建可部署自主分布系统(deployable autonomous distributed system, DADS), 使得水下的军事任务能以跨系统、跨平台、跨国家的协作方式进行, 还推动了舰队作战实验(如印度舰队作战实验(fleet battle experiment India, FBE-I))、浅海反潜战(anti- submarine warfare, ASW)(如分布式敏捷反潜项目(distributed agile submarine hunter, DASH))、水下通信(如Sublink项目)以及UUV命令与控制等计划, 用于沿海广大区域的警戒、反潜战和反水雷系统, 实施命令、控制、通信和导航功能。2006年, 于美国海军潜艇联合会-潜艇技术论坛披露了PLUSNet, 它是一种半自主控制的海底固定加水中机动的网络化设施, 由携带半自主传感器的多个潜航器组成。这些潜航器能够互相通信, 并在没有人为指令的情况下做出基本决策, 从而履行多种功能, 包括对温度、水流、盐度、化学成分及其他海洋元素进行取样, 密切监视并预测海洋环境变化。
欧盟第四框架(1994~1998年)计划支持下的海洋科学技术项目(marine science and technology, MAST)发展了一个系列化的水声通信网络研究计划。第五框架(1998~2002年)支持下的水声网络项目(acoustic communication network, ACMEnet)[84-85]是一个以长期、实时进行沿海环境观测为目的构建的水声通信网络, 分别于2002年9月和2003年9月进行了2次海试。ACMEnet采用基于MFSK/ TDMA的主从式网络协议, 主节点可调整网络的调制方式和声源级, 用轮询或定时方式直接或经过中继获得节点的数据, 中继通信采用静态路由。
欧盟第七框架(2008~2011年)计划支持下的水声网络(underwater acoustic network, UAN)项目[86], 其目标是在海上开发和测试一个创新且可运行的联合地面和空中传感器的网络系统以保护关键基础设施, 如离岸平台和能源工厂等。UAN着重于建立通过水声通信实现面向安全的水下无线网络基础设施, 通过收集声传播过程中海洋环境信息预测在任何给定时间上的声传播状况和可获得的最优化网络通信性能的研究方法。第七框架计划支持下的基于联合架构的水下感知、监测和管控项目(sensing, monitoring and actuating on the underwater world through a federated research infrastructure extending the future internet, SUN- RISE)[87]应用了物联网的理念, 提出了水下物联网(internet of underwater things, IOUT)的构想, 通过联合现有的水下基础设施对水下世界进行感知、监测和开发来扩大未来的互联网世界[88-89]。该项目是由欧洲多所科研院校和机构共同合作建立的水声通信网络联合试验项目。该项目新开发了网络协议SUNSET和水下航行器等平台, 在欧洲范围内建立了5种工作于不同水域环境(地中海、海洋、黑海、湖泊、运河)下的水声通信网络, 并可通过统一门户访问[83]。
欧盟“地平线2020”(2015~2018年)计划支持下的空地海未来网络试验(road-, air-, and water- based future internet experimentation, RAWFIE)项目, 旨在构建涵盖陆地、空中和水下的无人驾驶平台未来物联网的试验系统[90]。“地平线2020”计划支持下的水下机器人智能联合组网项目(sm- art and networking under water robots in cooperation meshes, SWARMs)[91-92]项目, 其基本概念如图8所示, 通过构建基于UUV的合作网络以降低海上作业的成本, 提高作业的安全性。
Seaweb项目从最初的可行性验证, 到不断的功能性扩展, 再到大规模分布式的组网试验研究, 有力地推动了水声通信网络的发展。其组网协议随着研究的深入不断得到优化和提升, 网络节点呈现出从静态到动态再到多平台联合的发展趋势。欧盟的水声通信网络系列化研究逐步推进, 其网络协议从简单的主从模式到依据信道动态优化方式, 组网节点从静态到覆盖陆地、空中和水下的多种平台。从美国和欧盟在水声通信网络领域的发展现状可以看出, 适应水下环境特点深入优化网络协议和实现水下与水面、空天多平台互连将是未来重要的发展趋势。
1.3.2 国内发展现状
我国水声通信网络的研究仍处在初步阶段, 西北工业大学、哈尔滨工程大学、厦门大学、中国海洋大学、中国科学院声学所和中国船舶重工集团公司第715研究所是我国进行此项研究较早的单位[93-94]。目前, 国内在水声通信组网的仿真研究较为广泛, 长持续时间海上试验较少[83], 具有代表性的国内水声通信网络研究项目主要有以下几个方面。
1) 在十二五国家重大专项子课题“隔水管疲劳监测系统研究”支持下, 西北工业大学航海学院研制了5节点的隔水管疲劳监测网络, 5个水下节点固定部署于隔水管上, 实时采集隔水管疲劳相关参数, 以水声通信方式传输数据, 采用TDMA方式接入水面处理节点。该网络分别于2012年、2014年在海洋石油“981”平台, 2015年在兴旺号石油平台完成了3次海上试验, 试验结果表明, 该系统能够长期有效地进行隔水管疲劳参数的采集与传输[95-97]。图9为该项目2014年在海洋石油“981”平台海试时其中2个节点的布放场景。
2) 在国家自然基金项目支持下, 西北工业大学航海学院研制了海空天跨介质通信网络, 该网络由5个水下节点和1个水面节点构成。5节点水下通信网络已具备网络自定位功能[98-99]。
3) 在863课题“OFDM水声通信及组网关键技”支持下, 哈尔滨工程大学于2014年6~7月在南海陵水附近海域进行了15节点的大规模水声通信组网测试, 该网络物理层同时支持高速OFDM和低速多载波MFSK两种通信制式, 在组网过程中可以根据传输数据包类型和目标数据率的大小自适应切换通信制式, 在网络层可同时支持随机接入的Aloha协议和握手方式的MACAW协议, 可根据数据包的长度自适应切换[100]。
4) 在863课题“海洋环境监测传感器网络技术”支持下, 中国科学院声学研究所通过研制的小型化、低功耗及通用型水声通信网络声通信节点, 分别于2008年和2009年在浙江千岛湖进行了2次湖上组网测试, 以正交相移键控相干通信和直接序列扩频通信2种通信方式为基础, 完成了4~7节点的自组织组网, 实时端对端传输图像、语音以及传感器数据(深度信息)[83, 101-102]。
5) 在863课题“深海海洋环境监测传感器网络技术”支持下, 中船重工第715研究所进行了基于集中式拓扑结构的3节点组网试验, 验证了节点值班休眠模式、自适应功率/数据率调整、SW-HARQ~链路层协议等[83, 103]。
从上述国内研究现状可以看出, 国内目前已开展了多种物理层通信技术的试验研究, 对典型的MAC层接入技术也开展了初步的性能验证, 网络的应用场景呈现出多样化, 基于网络场景和水下环境的网络协议优化已经逐步开展。对比国外研究现状, 国内虽然已有相当规模的水声通信网络试验研究(最大包含15个节点), 但仍需要进一步加强长期大规模的试验研究。
综合国内外研究现状可以看出, 不断提升水声通信网络协议性能, 使其更好地适应水声信道和水下环境特点始终是水声通信网络的研究重点, 尤其需要针对性的开发适用于长传播时延、链路不可靠等环境的水声通信网络组网协议。
1.4 多源信息融合探测技术
多个固定和移动节点通过水下网络联接形成有机整体, 利用其进行稳健、高效的跟踪和融合处理对于提高目标探测性能至关重要。然而, 复杂水声环境和安静型目标所导致的杂波率高、目标声源级微弱以及多目标航迹交叉对多源信息融合带来很大挑战。
鲁棒和高效的跟踪和融合对于网络化的多基地声呐系统至关重要。定位误差和大量的虚警是其所面临的主要挑战。跟踪/融合通常可基于战术层、接触(contact)层或原始信号层3个层次[104]。接触即是指经波束成形和匹配滤波等处理且超过检测门限的信号。与原始信号相比, 其在通信负荷和虚警率方面有许多优良的特性。目前, 北约水下研究中心和美国海军水下战研究中心在多基地声呐接触层的跟踪/融合取得了显著的进步。此外, 2005年国际信息融合协会成立了多基地跟踪工作组(multistatic tracking working group, MSTWG), 着力研究多基地声呐网络中的多目标跟踪问题。
在多源网络中部署实施融合跟踪算法时, 可将多传感器数据以扫描或预探测融合的方式[105]提供给跟踪器。其中, 扫描融合方式是将个传感器逐一扫描生成的组测量依次提供给跟踪器。而预探测融合则先融合组测量以生成1个单独的集合, 然后再将其提供给跟踪器。MSTWG的基准评估实验[106]显示了预探测融合具有显著的技术优势, 主要表现在: 能够充分利用源自目标的测量比噪声或杂波在传感器间更具持久性的特点; 通过减少传感器的测量数可显著降低跟踪器的计算复杂度; 灵活地与各种跟踪器相结合, 使其从中受益。
多传感器系统的最优探测工作最早始于20世纪80~90年代, 典型的如文献[107]~[112]。其考虑1个具有个传感器的二值探测问题, 并隐含假设已知目标位置, 而探测器的目的即是在2个简单假设间基于似然比率进行最佳区分:
0: noise only
1: target present + noise
但在实际声呐探测中, 无法确知目标位置, 因此, 备择假设是复合的, 进而无法直接应用基于似然比率探测的方法。因此, 近年来的研究关注于目标位置未知的现实多基地声呐网络中的数据融合方法。
Theije等[113-114]提出了一种用于融合2组笛卡尔捕捉的算法, 来融合由2个主动声呐系统观测到的, 基于计算所得的最近邻捕捉对的关联概率, 一个捕捉来自于1个声呐系统。以逻辑“或”(OR)和“与”(AND)为融合准则, 通过各种受试者工作特征(receiver operating characteristic, ROC)曲线评估算法在存在观测位置误差时的性能。实验显示该融合算法虽然不能提高ROC意义上的探测性能, 但是能够增强捕捉位置信息。但该方法并不能直接推广到个传感器的情况。此外, 直观可见在具有大规模低探测率和高虚警率的传感器数据集上, 如Metron数据集, 该方法对跟踪器的性能提升不明显。
预探测融合技术的出现源自采用跟踪器进行大规模低质量传感器数据分析的需求。Krout[115]和Hanusa采用所提多种跟踪器对Metron数据集进行分析。在进一步采用联合概率数据关联(joint probabilistic data association, JPDA)跟踪器进行数据集分析时[116], 为了缓和算法产生的大量错误轨迹, 跟踪之前引入了一个预处理步骤, 即从所有接收器计算得到的似然面中, 提取前30个局部最大作为某一扫的测量信息, 送至JPDA跟踪器。该算法在Metron数据集的场景1和4上取得了令人满意的结果, 但是其跟踪碎片和探测概率仍有待提高。这可看作最早的预探测融合技术。
一种称之为跟踪前融合(fusion before tracking, FbT)的预探测结构第一次明确强调了如何最优处理由大量廉价但性能有限的传感器所组成的大规模传感器监测网络所产生的数据[117]。FbT通过静态融合操作来组合扫描所得的测量信息[118], 与之相应的是比基于扫描的处理更强大的批处理技术。接着, 对经静态融合所得的输出采用基于扫描的处理, 获取实时监测结果。仿真数据集上的实验结果证明, FbT处理能够带来比集中式跟踪更好的性能。但是FbT没有充分利用度量协方差信息, 因而无法区分空间距离近的目标。
由Guerriero等[119]提出的多假设广义似然比检验(generalize likelihood ratio test, GLRT)为处理大规模传感器网络中的数据融合问题提供了一种自然的方式。对每一个假定目标, 均需找到最大化位置估计的似然函数, 最后在关于各目标下的似然中选择最大似然。因为似然函数需同时对目标数和其所在笛卡尔坐标中的位置进行最大化, 所以计算负荷极高, 无法满足实际应用需要。对此, Georgescu等[105]提出一种更具实用性的方法, 首先采用度量协方差进行蒙特卡罗采样, 以此缓解低质量传感器所带来的问题, 接着进行捕捉筛选, 最后跟随一个期望最大化(expectation maximization, EM)算法融合测量, 以进一步提高探测估计位置的精确性。与GLRT相比, 该方法在显著提高计算效率的同时却带来不容忽视的性能损失。
为了平衡计算复杂度与性能, Georgescu和Willett[120]提出一种基于随机有限集马尔科夫链-蒙特卡罗(random finite set Markov chain Monte Carlo, RFS MCMC)方法。该方法将潜在目标及其测量看作是由有限个随机变量组成的集合, 该集合可由概率质量函数和联合概率密度完全刻画。然后通过MCMC采样依次估计目标的势(即目标数)和每一个目标的位置及其相应的协方差。与最优的GLRT相比, 其目标定位误差仍有待进一步提高。
国内关于双/多基地声呐的研究始于20世纪90年代。中科院声学所[121]、中船重工第715研究所[122]、青岛潜艇学院[123]、东南大学[124]、上海交通大学[125]、哈尔滨工程大学[126]、西北工业大学[127]等单位对多基地声呐的相关问题进行了深入研究且取得了一些关键性突破。此外, 在信息融合领域, 国内著名学者韩崇昭[128]、何友[129]、敬忠良[130]、潘泉[131]等近年来出版了多部专著, 为这一领域的发展做出了积极的贡献。然而, 尚未发现国内关于大规模低质量传感器组成的多基地声呐网络中的预探测融合技术的研究。
1.5 海洋声信道对目标探测的影响
海洋声信道在时间和空间上都存在着不均匀性, 直接影响到主被动探测、通信组网以及多源信息融合的性能。声在海洋中的传播对环境非常敏感, 这与电磁波在空气中的传播有很大区别, 也是造成声呐探测与雷达探测不同的原因所在。起伏多变的海底底质、变化频繁的声速和温度、复杂的海面风浪等, 都会使得海洋声信号不断发生折射、反射及散射等, 导致其传播模式变得十分复杂。虽然如此, 海洋声传播仍遵循一些特定的规律, 可归纳为以下8种模式: 直达波模式、表面波导模式、声道模式、半声道模式、海底弹射模式、汇聚区模式、可靠声路径模式和浅海传播模式, 其中除直达波模式和浅海传播模式, 其他均为深海特有的声传播模式。另外, 水声环境的复杂性, 也会产生不同类型的混响, 引起嘈杂的噪声和干扰, 给声探测带来难以忽视的影响。
随着对海洋声传播规律的研究不断加深, 人们开始逐渐将海洋信道的影响考虑到信号处理方法运用中。对于浅海环境的复杂性, 人们先后提出了匹配场处理[132-135]、时反聚焦处理[136-138]及其相关的通信技术[139-141], 很好地提高了浅海声学目标检测、定位和通信的性能。而对于深海环境, 利用不同传播模式的定位方法也不断被提出, 比较典型的有基于多途到达结构的定位方法[142-143]、基于干涉条纹的定位方法[143-145]等, 均取得了不错的效果。
现阶段, 关于海洋传播物理规律以及相关的探测定位方法的研究方兴未艾, 成果层出不穷, 对其发展情况的介绍可另著长文进行综述, 文中更侧重于信号处理方面的进展, 对声场相关的内容不再赘述。
2 未来发展趋势
基于以上对发展现状的介绍, 笔者认为海洋声学目标探测技术未来发展的趋势将会体现在以下几个方面。
2.1 被动探测技术
从空域处理的角度, 被动探测技术未来发展的趋势主要有以下几个方面。
1) 大孔径阵列的稳健阵列处理技术
水下目标减振降噪技术的发展, 使得预警探测声呐系统的处理频段逐渐下移, 能够提供更高处理增益的大孔径水听器阵列展示出了巨大的应用前景, 其主要应用场合有岸基预警声呐以及船用拖曳阵声呐等。考虑到低频段海洋环境噪声更加嘈杂, 同时大孔径阵列尤其是柔性阵列易受系统自身误差和环境因素的影响, 造成目标方位估计精度严重下降。因此, 大孔径阵列的稳健阵列处理技术变得十分重要, 也是未来的发展趋势之一。
2) 新型传感器及其阵列
现有水听器包含标量声压水听器和矢量水听器, 前者本身没有指向性, 而后者能够提供最高6 dB的指向性, 因此由矢量水听器构成的阵列将具有比声压水听器阵列更高的指向性[3]。然而, 矢量水听器及其阵列所能提供的指向性仍然有限, 研制具有更高指向性的小尺度水声传感器及其阵列, 对于进一步提升被动探测的性能具有重要意义。已有的关于高阶超指向性声学传感器及其阵列的研究成果证明了其存在的巨大潜力, 进一步将其应用于实际海洋环境中也将是提升被动探测性能的趋势之一。
3) 信号处理与水声物理模型的充分结合
现有被动探测的空域处理方法, 如波束形成、方位估计等, 大部分仍然基于平面波假设, 而实际海洋环境有时并不满足。水声信号在实际海洋中的传播, 会受到海底海面反射、波导效应, 以及锋面、涡旋、内波等物理现象的影响, 造成信号扩展、延迟叠加等畸变, 不仅使得平面波假设失效, 而且信号相干性也会受到很大影响。将信号处理方法与水声传播规律结合, 势必将大大提高被动探测的性能。现阶段, 相关研究虽已取得丰硕成果, 但仍存在很多基础问题有待深入研究, 与之相关的信号处理理论也需进一步研究。只有更加深入地理解水声传播的物理规律, 才能提出更适用的被动信号处理方法以提升被动探测性能, 这仍是未来需着重研究的一个方向。
2.2 主动探测技术
主动探测技术的未来发展趋势包括以下几个方面。
1) 继续发展低频大功率探测技术
低频大功率探测技术的发展趋势是继续往更小体积、更低频率及更大功率发展。随着探测距离要求的不断提高, 现有低频大功率发射换能器频率仍然需要进一步降低。同时, 低频大功率探测技术需要聚焦于如何在期望的工作频段上减小发射换能器体积、提高声能辐射效率等。
2) 继续发展多基地组网探测技术
为了更有效地探测隐身目标, 传统的单基地探测模式已经很难满足需求。随着作战环境的恶劣化、作战任务的复杂化, 传统的单基地主动水声探测技术正逐步往双/多基地探测模式转变。主要有2种技术方案实现双/多基地探测: ①在已有的单基地探测技术上, 对相关设备进行改造, 对处理技术进行升级, 从而使其获得双/多基地探测能力, 满足多样化探测的需求; ②根据相关的任务需求, 研究全新的双/多基地探测技术, 并据此研制全新的双/多基地探测系统。
3) 继续研究新体制主动探测技术
主动声呐技术的发展过程中, 新体制探测技术可在较小的代价下获得优于传统探测技术的探测优势, 从而成为探测性能提高的倍增器, 理应受到未来持续不断的关注。因此, 未来需进一步研究新体制主动探测技术, 包括具有集成创新特色的多基地合成孔径声呐探测技术、MIMO合成孔径声呐探测技术、分布式MIMO声呐组网探测技术, 以及发展借鉴海洋生物探测功能的仿生探测技术等。
4) 发展智能化主动探测技术
主动探测技术性能受到使用环境的影响较大, 传统的参数固化的探测方法并不能适应复杂多变的海洋环境。未来需根据不同的使用环境(如不同的噪声背景、混响背景等)、不同的目标特性、不同的声呐类型(如浮标声呐、舰壳声呐、拖曳线列阵声呐等), 研究智能化的主动探测技术。通过在多次重复使用中不断积累对环境的认知信息, 抑或继承前序设备所累积的环境认知信息, 将这些认知信息融入到主动探测过程, 可随着使用环境的改变而智能地调整发射波形、接收滤波器参数、噪声/混响抑制方法等, 从而显著提高在不同环境下、不同海域中对不同类型目标的探测性能。
5) 发展生态友好型主动探测技术
由于主动声呐不断往低频大功率发展, 在使用过程中, 其较低的频率和较大的声源级已经对海洋生态环境造成了破坏, 对海洋生物尤其是使用生物声呐的哺乳动物(鲸鱼、海豚等)造成了伤害[56]。如何在使用低频大功率声呐过程中, 避免或减少对海洋生物的影响, 是需要研究的技术问题。因此, 发展可同时兼顾军事应用和生态保护的主动探测新技术, 是未来主动探测技术发展的方向之一。
2.3 水下通信组网技术
水下通信组网技术的未来发展趋势主要有:
1) 利用网络协议提高工程应用中复杂海洋环境条件下水声网络的通信可靠性。针对现有海洋环境的复杂特性, 研究面向实际应用及适用于长传播时延、链路不可靠等环境的水声网络组网协议, 利用水声网络协议提高水声通信可靠性, 从而实现可靠的水声通信, 降低复杂海洋环境对水声通信的影响, 是未来研究的重要方向。
2) 适合空天海跨介质组网协议的研究。从美国和欧盟在水声通信网络领域的发展现状可以看出, 适应水下环境特点深入优化网络协议和实现水下与水面、空天多平台互联将是未来重要的发展趋势之一。因此, 如何实现空天海跨介质网络高效、可靠无冲突的接入问题, 异构网络之间的可靠路由问题, 以及异构网络之间、不同网络层之间如何协作实现整体最优的问题, 是未来重要的研究方向。
3) 面向任务的网络资源调度。现有的水声网络协议致力于提高通用网络在吞吐量、端到端时延及网络生存周期等方面的性能表现, 但是在工程应用中, 需要针对不同的工程应用提供相应的网络资源调度策略。例如在快速反应网络中, 需要针对不同节点需要的反应时间进行带宽、信道等资源的分配, 从而实现网络在此种应用的特定性能表现。因此, 如何设计网络的资源调度策略, 使得可以适应于不同工程应用的水声网络是未来研究的重要方向。
4) 标准化水声网络实验平台建设。虽然过去几十年内国内水声网络建设已经得到了飞速发展, 但是主要还是集中在理论研究及仿真实现等方面, 即便已经实现的水声网络, 也主要针对简单的网络协议, 还不能很好地应对工程实际中的应用需求。为实现水声网络建设在工程实际应用中的快速发展, 标准化水声网络实验平台的建设迫在眉睫, 如何建设适用于不同网络协议, 不同工程应用, 不同海洋环境的标准化水声网络实验平台, 是现阶段一个重要的研究方向。
2.4 多源信息融合探测技术
现有的融合探测技术主要是基于概率的方法, 如求解融合探测的最优技术、GLRT方法[119]等。然而, 因GLRT需对似然函数关于目标数和目标在笛卡尔坐标上的位置分别最大化, 所以计算负荷极高。对此, 文献[105]提出了一种快速融合探测策略, 即测量筛选跟随一个期望最大化来改进探测估计的位置。在MSTWG所提供的标准数据集上, 该策略比GLRT快近4个数量级, 但同时也带来了1 000~2 000 m的定位误差。为了平衡计算效率与定位精度, 文献[120]提出一种基于随机有限集(random finite set, RFS)的方法, 由MCMC仿真实现, 即RFS-MCMC。采用相同的评估环境, RFS-MCMC取得了介于GLRT和FPF之间的性能; 但仍存在不可忽视的性能“鸿沟”: 比FPF慢2个数量级, 比GLRT增加500~1 000 m的定位误差。为弥补这一“鸿沟”, 需进一步深入测量信息与信息间互补关系的建模研究。
3 结束语
面向海洋环境安全保障的迫切需求, 构建由主被动探测节点组成的分布式水下探测网络, 进行多源声学信息融合, 是提升水下目标探测能力的有效途径, 也是海洋声学目标探测技术发展的重要思路之一。基于此, 文中从主被动探测、水下通信组网和多源信息融合等4个方面对海洋声学目标探测技术的现状进行了介绍, 给出了其未来的发展趋势。实际上, 海洋声学目标探测已发展成为一项跨学科、多信息相互交融的研究领域,文中从一个侧面进行了较详细的介绍, 挂一漏万, 希望能为感兴趣的读者提供有价值的参考。
[1] 杨益新. 声呐波束形成与波束域高分辨方位估计技术研究[D]. 西安: 西北工业大学, 2002.
[2] 杨德森, 洪连进. 矢量水听器原理及应用引论[M]: 科学出版社, 2009.
[3] 杨德森, 朱中锐, 田迎泽. 矢量声呐技术理论基础及应用发展趋势[J]水下无人系统学报, 2018, 26(3): 185-192. Yang De-sen, Zhu Zhong-rui, Tian Ying-ze. Theoretical Bases and Application Development Trend of Vector Sonar Technology[J]. Journal of Unmanned Undersea Systems, 2018, 26(3): 185-192.
[4] 刘孟庵. 拖曳线列阵声呐技术发展综述[J]声学与电子工程, 2006(3): 1-5.Liu Meng-an. Review of Technology Development for Towed Line Sonar Arrays[J]. Acoustics and Electronic Engineering, 2006(3): 1-5.
[5] 庞博. 国外潜用拖曳阵声呐简介[J]声学与电子工程, 2012(1): 44-46.Pang Bo. Introduction of Foreign Towed Line Sonars of Submarine[J]. Acoustics and Electronic Engineering, 2012 (1): 44-46.
[6] Lockheed Martin Space Systems Company. TB-29 series [EB/OL]. (2018-01-06)[2018-10-16]. http://www.lockhe- edmartin.com/.
[7] 田坦. 声呐技术[M]: 哈尔滨工程大学出版社, 2010.
[8] Thales Group. FLASH Dipping Sonar[EB/OL]. (2017- 5-18)[2018-10-16]. https://www.thalesgroup.com/en
[9] L3 Company. HELRAS Dipping Sonar[EB/OL]. (2016- 12-02)[2018-10-16]. https://www.l3t.com/
[10] DST. Barra Sonobuoy[EB/OL]. (2009-03-07)[2018-10- 16]. https://www.dst.defence.gov.au/innovation/barraso- nobuoy.
[11] Sonobuoy Tech Systems. ADAR Sonobuoy[EB/OL]. (2010- 06-17)[2018-10-16]. http://sonobuoytech-systems. com/.
[12] Veen B D V, Buckley K M. Beamforming: A Versatile Approach to Spatial Filtering[J]IEEE ASSP Magazine, 1988, 5(2): 4-24.
[13] Van Trees H L. Optimum Array Processing: Part Iv of Detection, Estimation, and Modulation Theory[M]. New York: John Wiley & Sons, Inc., 2002.
[14] 杨益新, 汪勇, 何正耀, 等. 传感器阵列超指向性原理及应用[M]. 北京: 科学出版社, 2018.
[15] Doclo S, Moonen M. Superdirective Beamforming Robust against Microphone Mismatch[J]. IEEE Transactions on Audio, Speech and Language Processing, 2007, 15(2): 617-631.
[16] Crocco M, Trucco A. Design of robust Superdirective Arrays with a Tunable Tradeoff between Directivity and Frequency-Invariance[J]IEEE Transactions on Signal Processing, 2011, 59(5): 2169-2181.
[17] Meyer J, Elko G W. A Highly Scalable Spherical Microphone Array Based on an Orthonormal Decomposition of the Soundfield[C]//IEEE International Conference on Ac- oustics, Speech, and Signal Processing(ICASSP), Orlando, FL, USA: IEEE, 2002.
[18] Meyer J. Beamforming for a Circular Microphone Array Mounted on Spherically Shaped Objects[J]. Journal of the Acoustical Society of America, 2001, 109(1): 185-193.
[19] Ma Y L, Yang Y X, He Z Y, et al. Theoretical and Practical Solutions for High-Order Superdirectivity of Circular Sensor Arrays[J]IEEE Transactions on Industrial Electronics, 2013, 60(1): 203-209.
[20] Wang Y, Yang Y X, Ma Y L, et al. Robust High-Order Superdirectivity of Circular Sensor Arrays[J]Journal of the Acoustical Society of America, 2014, 136(4): 1712- 1724.
[21] Wang Y, Yang Y X, He Z Y, et al. A General Superdire- ctivity Model For Arbitrary Sensor Arrays[J]Eurasip Journal on Advances in Signal Processing, 2015, 2015(68): 1-16.
[22] 鄢社锋, 马远良. 传感器阵列波束优化设计及应用[M]. 北京: 科学出版社, 2009.
[23] 马远良. 任意结构形状传感器阵方向图的最佳化[J]中国造船, 1984, 87(4): 78-85.Ma Yuan-liang. Pattern Optimisation for Sensor Arrays of Arbitrary Configuretion[J]. China Ship Building, 1984, 87(4): 78-85.
[24] Olen C A, Compton R T J. A Numerical Pattern Synthesis Algorithm for Arrays[J]. IEEE Transactions on Antennas and Propagation, 1990, 38(10): 1666-1676.
[25] Capon J. High-resolution Frequency-Wavenumber Spectrum Analysis[J]Proceeding of the IEEE, 1969, 57(8): 1408-1418.
[26] Godara L. The Effect of Phase-Shifter Errors on the Performance of an Antenna-Array Beamformer[J]IEEE Journal of Oceanic Engineering, 1985, 10(3): 278-284.
[27] Kim J W, Un C K. An Adaptive Array Robust to Beam Pointing Error[J]IEEE Transactions on Signal Processing, 1992, 40(6): 1582-1584.
[28] Jablon N. Adaptive Beamforming with the Generalized Sidelobe Canceller in the Presence of Array Imperfections [J]IEEE Antennas and Propagation Society, 1986, 34(8): 996-1012.
[29] Ringelstein J, Gershman A B, Bohme J F. Direction Finding in Random Inhomogeneous Media in The Presence of Multiplicative Noise[J]IEEE Signal Processing Letters, 2000, 7(10): 269-272.
[30] Cox H, Zeskind R M, Owen M M. Robust Adaptive Beamforming[J]IEEE Transactions on Acoustics, Speech and Signal Processing, 1987, 35(10): 1365-1376.
[31] Liu C, Liao G. Robust Capon Beamformer under Norm Constraint[J]. Acta Electronica Sinica, 2010, 90(5): 1573-1581.
[32] Vorobyov S A, Gershman A B, Luo Z Q. Robust Adaptive Beamforming Using Worst-Case Performance Optimization: A Solution to the Signal Mismatch Problem[J]. IEEE Transactions on Signal Processing, 2003, 51(2): 313-324.
[33] Li J, Stoica P, Wang Z. Doubly Constrained Robust Capon Beamformer[J]IEEE Transactions on Signal Processing, 2004, 52(9): 2407-2423.
[34] Li J, Stoica P, Wang Z. On Robust Capon Beamforming and Diagonal Loading[J]IEEE Transactions on Signal Processing, 2003, 51(7): 1702-1715.
[35] Stoica P, Wang Z, Li J. Robust Capon Beamforming[J]. IEEE Signal Processing Letters, 2002, 10(6): 172- 175.
[36] Lorenz R G, Boyd S P. Robust Minimum Variance Beamforming[J]IEEE Transactions on Signal Processing, 2005, 53(5): 1684-1696.
[37] Kim S J, Magnani A, Mutapcic A, et al. Robust Beamforming Via Worst-Case SINR Maximization[J]IEEE Transactions on Signal Processing, 2008, 56(4): 1539- 1547.
[38] Krim H, Viberg M. Two Decades of Array Signal Processing Research: The Parametric Approach[J]IEEE Signal Process Magazine, 1996, 13(4): 67-94.
[39] Schmidt R O. Multiple Emitter Location and Signal Parameter Estimation[J]. IEEE Transactions on Antennas & Propagation, 1986, 34(3): 276-280.
[40] Roy R, Paulraj A, Kailath T. ESPRIT-A Subspace Rotation Approach to Estimation of Parameters of Cisoids in Noise[J]IEEE Transactions on Acoustics, Speech, and Signal Processing, 1986, 34(5): 1340-1342.
[41] Roy R, Kailath T. ESPRIT-Estimation of Signal Parameters Via Rotational Invariance Techniques[J]IEEE Tran- sactions on Acoustics, Speech, and Signal Processing, 1989, 37(7): 984-995.
[42] Yardibi T, Li J, Stoica P, et al. Sparsity Constrained Deconvolution Approaches for Acoustic Source Mapping[J]Journal of the Acoustical Society of America, 2008, 123(5): 2631-2642.
[43] Cotter S F, Rao B D, Kjersti E, et al. Sparse Solutions to Linear Inverse Problems with Multiple Measurement Vectors[J]IEEE Transactions on Signal Processing, 2005, 53(7): 2477-2488.
[44] Malioutov D M. A Sparse Signal Reconstruction Perspective for Source Localization with Sensor Arrays[D]. Cambridge, MA: Massachusetts Institute Technology, 2003.
[45] Zheng J, Kaveh M. Sparse Spatial Spectral Estimation: A Covariance Fitting Algorithm, Performance and Regularization[J]IEEE Transactions on Signal Processing, 2013, 61(11): 2767-2777.
[46] Xenaki A, Gerstoft P, Mosegaard K. Compressive Beamforming[J]Journal of the Acoustical Society of America, 2014, 136(1): 260-271.
[47] Stoica P, Babu P, Li J. Spice: A Sparse Covariance-Based Estimation Method for Array Processing[J]IEEE Transactions on Signal Processing, 2011, 59(2): 629-638.
[48] Stoica P, Babu P, Li J. New Method of Sparse Parameter Estimation in Separable Models and Its Use for Spectral Analysis of Irregularly Sampled Data[J]IEEE Transactions on Signal Processing, 2011, 59(1): 35-47.
[49] Yang L, Yang Y, Wang Y. Sparse Spatial Spectral Estimation in Directional Noise Environment[J]Journal of the Acoustical Society of America, 2016, 140(3): EL263- EL268.
[50] Stoica P, Babu P. SPICE and LIKES: Two Hyperparameter-Free Methods for Sparse-Parameter Estimation[J]Signal Processing, 2012, 92(7): 1580-1590.
[51] Somasundaram S D. Wideband Robust Capon Beamforming for Passive Sonar[J]. IEEE Journal of Oceanic Engineering, 2013, 38(2): 308-322.
[52] Wang H, Kaveh M. Coherent Signal-Subspace Processing for the Detection and Estimation of Angles of Arrival of Multiple Wide-Band Sources[J]Acoustics Speech & Signal Processing IEEE Transactions on, 1985, 33(4): 823-831.
[53] 鄢社锋, 马远良, 侯朝焕. 宽带波束域相干信号子空间高分辨方位估计[J]声学学报, 2006, 31(5): 418-424.Yan She-feng, Ma Yuan-liang, Hou Chao-huan. Beampattern Optimization for Sensor Arrays of Arbitrary Geometry and Element Directivity[J]. Acta Acustica, 2006, 31(5): 418-424.
[54] Liu Z M, Huang Z T, Zhou Y Y. Direction-of-arrival Estimation of Wideband Signals via Covariance Matrix Sparse Representation[J]IEEE Transactions on Signal Processing, 2011, 59(9): 4256-4270.
[55] 王鲁军, 凌青, 袁延艺. 美国声呐装备和技术[M]. 北京: 国防工业出版社, 2011.
[56] 王鲁军. 国外低频主动拖曳声呐发展现状和趋势[J]水下无人系统学报, 2018, 26(3): 193-199.Wang Lu-jun. Current Status and Developing Trend of Low Frequency Active Towed Sonar Abroad[J]. Journal of Unmanned Undersea Systems, 2018, 26(3): 193-199.
[57] 莫喜平. 水声换能器发展中的技术创新[J]陕西师范大学学报(自然科学版), 2018, 46(3): 1-12..Mo Xi-Ping. Technical Innovations with Progress of Underwater Transducers[J]. Journal of Shaanxi Normal University(Natural Science Edition), 2018, 46(3): 1-12.
[58] 周利生, 胡青. 水声发射换能器技术研究综述[J]哈尔滨工程大学学报, 2010, 31(7): 932-937.Zhou Li-sheng, Hu Qing. Summarization of Underwater Acoustic Projector Technologies[J]. Journal of Harbin Engineering University, 2010, 317(7): 932-937.
[59] 李宽. 四边型弯张换能器研究[D]. 哈尔滨: 哈尔滨工程大学, 2015.
[60] 桑永杰. 低频宽带水声换能器研究[D]. 哈尔滨: 哈尔滨工程大学, 2015.
[61] 张小凤. 双/多基地声呐定位及目标特性研究[D]. 西安:西北工业大学, 2003.
[62] 凌青. 基于多站址信息综合的水下探测定位技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2006.
[63] 雷波. 水下物体声散射与前向散射信号检测[D]. 西安: 西北工业大学, 2010.
[64] 蒋敏. 无人水下航行器舷侧MIMO阵列目标探测技术研究[D]. 西安: 西北工业大学, 2011.
[65] 刘雄厚. 无人水下航行器舷侧MIMO阵列目标探测技术研究[D]. 西安: 西北工业大学, 2014.
[66] 滕婷婷. 基于共址MIMO图像声呐的水下运动小目标检测跟踪技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2014.
[67] 孙超, 刘雄厚. MIMO声呐: 概念与技术特点探讨[J]声学技术, 2012, 31(2): 117-124.Sun Chao, Liu Xiong-hou. MIMO Sonar: Concept and Technical Characteristic Discuss[J]. Technical Acoustics, 2012, 31(2): 117-124.
[68] Bekkerman I, Tabrikian J. Target Detection and Localization Using Mimo Radars and Sonars[J]IEEE Transactions on Signal Processing, 2006, 54(10): 3873-3883.
[69] Ma N. Frequency Diversity for Active Sonar/Radar Application and Optimal Receiver Design[C]//Oceans 2010 MTS/IEEE Seattle, USA: IEEE, 2010.
[70] 李宇, 王彪, 黄海宁, 等. MIMO探测声呐研究[C]//中国声学学会2007年青年学术会议论文集(下), 郑州: 中国声学学会, 2007.
[71] 王福钋, 李淑秋, 李宇, 等. 迭代法MIMO声呐目标检测——一种凸显弱目标的方法[J]应用声学, 2010, 29(1): 11-16.Wang Fu-bo, Li Shu-qiu, Li Yu, et al. An Iterative Way of MIMO Sonar Target Detection: A Method that Protrudes the Weak Target[J]. Applied Acoustics, 2010; 29(1): 11-16
[72] Cai L, Ma X, Li S. On Orthogonal Waveform Design For Mimo Sonar[C]//International Conference on Intelligent Control and Information Processing, Dalian, China: IEEE, 2010: 69-72.
[73] Huang J, Zhang L, Hou Y, et al. Modified Subspace Algorithms For DOA Estimation Using MIMO Array[C]//In- ternational Conference on Signal Processing, Beijing, China: IEEE, 2008, 195-198.
[74] Huang J, Zhang L, Zhang Q, et al. Performance Analysis Of DOA Estimation For MIMO Sonar Based On Experiments[C]//2009 IEEE/SP 15th Workshop on Statistical Signal Processing, Cardiff, UK : IEEE, 2009: 269-272.
[75] 刘雄厚. 密布式MIMO声呐成像技术研究[D]. 西安: 西北工业大学, 2014.
[76] 郭小虎. 共址MIMO探测方法及实验研究[D]. 杭州: 浙江大学, 2012.
[77] 张友文, 孙大军. MIMO声呐自适应波束形成技术研究[C]//2009年度全国物理声学会议, 西安: 中国声学学会, 2009.
[78] 滕婷婷, 孙大军, 刘鑫, 等. 波形分集MIMO成像声呐技术研究[J]哈尔滨工程大学学报, 2013, 34(5): 581- 587.Teng Ting-ting, Sun Da-jun, Liu Xin, et al. The Techniques for Waveform Diversity MIMO Imaging Sonar[J]. Journal of Harbin Engineering University, 2013, 34(5): 581-587.
[79] Rice J, Creber B, Fletcher C, et al. Evolution of Seaweb Underwater Acoustic Networking[C]//OCEANS 2000 MTS/ IEEE Conference and Exhibition. Conference Proceedings (Cat. No.00CH37158), Providence, RI, USA, USA : IEEE, 2002.
[80] 赵瑞琴, 申晓红, 姜喆. 水下信息网络基础[M]. 西安: 西北工业大学出版社, 2017.
[81] Honegger B. Naval Postgraduate School Pioneers “Seaweb” Undersea Sensor Networks[EB/OL]. (2003-02-15) [2018-10-16]. http://www.navy.mil/submit/display.asp?st- ory_id=55235/.
[82] Rice J. Seaweb Acoustic Communication and Navigation Networks[C]//Underwater Acoustic Measurements: Tech- nologies & Results, Heraklion, Crete, Greece, 2005.
[83] 乔钢, 刘凇佐, 刘奇佩. 水声通信网络协议、仿真与试验综述[J]水下无人系统学报, 2017, 25(2): 151-160.Qiao Gang, Liu Song-zuo, Liu Pei-qi. Review of Protocols, Simulation and Experimentation for Underwater Acoustic Communication Network[J]. Journal of Unmanned Undersea Systems, 2017, 25(2): 151-160.
[84] Adams A E, Acar G. An Acoustic Network Protocol for Subsea Sensor Systems[C]//Europe Oceans 2005, Brest, France: IEEE, 2005.
[85] Acar G, Adams A E. ACMEnet: An Underwater Acoustic Sensor Network Protocol for Real-Time Environmental Monitoring in Coastal Areas[J]IEEE Proceedings-Radar, Sonar and Navigation, 2006, 153(4): 365-380.
[86] CORDIS. Underwater Acoustic Network[EB/OL]. (2008- 10-01)[2018-10-16]. http://cordis.europa.eu/project/rcn/ 87609_en.html.
[87] Sunrise: Building the Internet of Underwater Things [EB/OL]. (2013-01-01)[2018-10-16]. http://fp7-sunrise.e u/index.php.
[88] Alves J, Potter J, Guerrini P, et al. The Loon in 2014: Test Bed Description[C]//2014 Underwater Communications and Networking, Sestri Levante, Italy: IEEE, 2015.
[89] Martins R, Borges de Sousa J, Caldas R, et al. Sunrise Project: Porto University Testbed[C]//2014 Underwater Communications and Networking, Sestri Levante, Italy: IEEE, 2015.
[90] RAWFIE. Road-, Air-, And Water- Based Future Internet Experimentation[EB/OL]. (2017-12-01)[2018-10-16]. http: //www. rawfie.eu/
[91] Real-Arce D, Morales T, Barrera C, et al. Smart and Networking Underwater Robots in Cooperation Meshes: the Swarms Ecsel: H2020 Project[C]//7th International Work- shop on Marine Technology: MARTECH, 2016:19.
[92] SWARMs. Smart and Networking Underwater Robots in Cooperation Meshes[EB/OL]. (2015-07-01)[2018-10-16]. http://www.swarms.eu/overview.html.
[93] 许肖梅. 水声通信与水声网络的发展与应用[J]声学技术, 2009, 28(6): 811-816.Xu Xiao-mei. Development and Application of Underwater Acoustic Communication and Networks[J]. Technical Acoustics, 2009, 28(6): 811-816
[94] 郭忠文, 罗汉江, 洪锋, 等. 水下无线传感器网络的研究进展[J]计算机研究与发展, 2010, 47(3): 377-389. Guo Zhong-wen, Luo Han-jiang, Hong Feng, et al. Current Progress and Research Issues in Underwater Sensor Networks[J]. Journal of Computer Research and Development, 2010, 47(3): 377-389.
[95] Li B, Wang H, Shen X, et al. Deep-water Riser Fatigue Monitoring Systems Based on Acoustic Telemetry[J]Journal of Ocean University of China, 2014, 13(6): 951- 956.
[96] 秦川. 光纤布拉格光栅传感解调技术及应用研究[D]. 西安: 西北工业大学, 2015.
[97] 李保军. 海洋管线涡激振动监测关键技术研究[D]. 西安: 西北工业大学, 2015.
[98] 白卫岗. 水声通信网络组网协议关键技术研究[D]. 西安: 西北工业大学, 2018.
[99] Gao J, Shen X, Zhao R, et al. A Double Rate Localization Algorithm with One Anchor for Multi-Hop Underwater Acoustic Networks[J]Sensors, 2017, 17(5): 984.
[100]哈尔滨工程大学水声通信与网络实验室. OFDM水声通信网络[EB/OL]. (2017-11-20)[2018-10-16]. http://uacan. hrbeu.edu.cn/1598/list.htm.
[101]房栋, 李宇, 尹力, 等. 水声传感器网络MAC协议研究与实现[C]//全国水声学学术交流暨水声学分会换届改选会议. 大连: 中国声学学会水声学分会委员会, 2009.
[102]刘旬, 李宇, 张春华, 等. 水下自组织网络AODV协议研究与应用[C]//全国水声学学术交流暨水声学分会换届改选会议. 大连: 中国声学学会水声学分会委员会, 2009.
[103] 熊省军, 周士弘. 水声Modem混合自动重传试验研究[J]声学与电子工程, 2010(4): 30-33.Xiong Sheng-jun, Zhou Shi-hong. Experimental study of Automatic Retransmission for Underwater Acoustic Modem[J]. Acoustics and Eletronic Engineering, 2010(4): 30-33.
[104] Been R, Jespers S, Croaluppi S, et al. Multistatic Sonar: A Road to a Maritime Network Enabled Capability[C]//in Undersea Defence Technology Europe, La Spezia, Italy, 2007.
[105]Georgescu R, Willett P, Marano S, et al. Predetection Fusion in Large Sensor Networks with Un-Known Target Locations[J]ISIF Journal of Advances in Information Fusion, 2012, 7(1): 61-77.
[106]Coraluppi S, Grimmett D, Theije P D. Benchmark Evaluation of Multistatic Trackers[C]//2006 9th International Conference on Information Fusion, Florence, Italy: IEEE, 2007: 1-7.
[107]Chair Z, Varshney P K. Optimal Data Fusion In Multiple Sensor Detection Systems[J]IEEE Transactions on Aerospace & Electronic Systems, 2007, AES-22(1): 98-101.
[108]Reibman A R, Nolte L W. Optimal Detection and Performance of Distributed Sensor Systems[J]Aerospace & Electronic Systems IEEE Transactions on, 2000, AES- 23(1): 24-30.
[109] Tenney R R, Sandell N R. Detection with Distributed Sensors[J]Aerospace & Electronic Systems IEEE Transactions on, 1981, AES-17(4): 501-510.
[110] Tsitsiklis J N. Decentralized Detection[J]Advances in Statistical Signal Processing, 1993(2): 297-344.
[111]Tsitsiklis J N. Extremal Properties of Likelihood-Ratio Quantizers[J]IEEE Transactions on Communications, 1989, 41(4): 550-558.
[112]Warren D, Willett P. Optimum Quantization for Detector Fusion: Some Proofs, Examples, and Pathology[J]Journal of the Franklin Institute, 1999, 336(2): 323-359.
[113]Theije P A M D, Moll C A M V. An Algorithm for the Fusion of Two Sets of (Sonar) Data[C]//Europe Oceans 2005, Brest, France: IEEE, 2005.
[114]Theije P A M D, Moll C A M V, Ainslie M A. The Dependence of Fusion Gain on Signal-Amplitude Distributions and Position Errors[J]IEEE Journal of Oceanic Engineering, 2009, 33(3): 266-277.
[115]Krout D W, Morrison D. PDAFAI vs. PDAFAIwTS: TNO Blind Dataset and SEABAR'07[C]//2009 12th International Conference on Information Fusion, Seattle, WA, USA: IEEE, 2009: 1845-1850.
[116]Krout D W, Hanusa E. Likelihood Surface Preprocessing with the JPDA Algorithm: Metron Data Set[C]//2010 13th International Conference on Information Fusion, Edinburgh, UK: IEEE, 2011: 1-7.
[117]Coraluppi S, Carthel C. Multi-stage Data Fusion and the MSTWG TNO Datasets[C]//2009 12th International Con- ference on Information Fusion, Seattle, WA, USA: IEEE, 2009: 1552-1559.
[118]Guerriero M. Statistical signal Processing in Sensor Networks[D]. CT: University of Connecticut, 2009.
[119] Guerriero M, Coraluppi S, Willett P. Analysis of Scan and Batch Processing Approaches to Static Fusion in Sensor Networks[C]//SPIE Defense and Security Symposium, Orlando, Florida, United States: SPIE, 2008.
[120]Georgescu R, Willett P. Random Finite Set Markov Chain Monte Carlo Predetection Fusion[C]//14th International Conference on Information Fusion, Chicago, IL, USA: IEEE, 2011: 1-8.
[121]李嶷, 李启虎, 孙长瑜. 多基地声呐定位误差最小的模板法[J]系统仿真学报, 2011, 23(11): 2465-2470.
Li Yi, Li Qi-hu, Sun Chang-yu. Deployment Algorithm of Multistatic Sonar Based on Minimum Localization Error[J]. Journal of System Simulation, 2011, 23(11): 2465- 2470.
[122]白士君, 凌国民. 水声网络探测节点的一种运动目标参数估计算法[J]舰船电子工程, 2010, 30(5): 186-189.Bai Shi-jun, Ling Guo-min. A Moving Target Parameters Estimation Algorithm Used FRO Underwater Acoustic Networks Detection Nodes[J]. Ship Electronic Engineering, 2010, 30(5): 186-189.
[123]谷秀明, 李博. 声呐信息融合技术研究[J]科技资讯, 2011(3): 6.
Gu Xiu-ming, Li Bo. On Sonar Information Fusion Technolugy[J]. Science & Technology Information, 2011(3): 6.
[124]张宁. 水声目标的多阵声呐信息综合识别技术研究[D]. 南京: 东南大学, 2008.
[125]金惠明, 李建勋. 反潜直升机吊放声呐搜潜策略分析[J]电光与控制, 2011, 18(8): 26-28.Jin Hui-ming, Li Jian-xun. Submarine Searching Strategies for Dipping Sonar on Antisubmariine Helicopter[J]. Electronics Optics & Control, 2011, 18(8): 26-28.
[126]邹吉武. 多基地声呐关键技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2012.
[127] 刘若辰, 王英民, 张群. 基于线性最小二乘估计的双基地声呐定位优化算法[J]鱼雷技术, 2011, 19(6): 428-432.
Liu Ruo-chen, Wang Ying-min, Zhang Qun. Optimum Localization Algorithm Based on the Linear Least Squares Estimate for Bistatic Sonar[J]. Torpedo Technology, 2011, 19(6): 428-432.
[128]韩崇昭, 朱洪艳, 段战胜, 等. 多源信息融合[M]. 北京: 清华大学出版社, 2010.
[129]何友, 王国宏, 关欣. 信息融合理论及应用[M]. 北京:电子工业出版社, 2010, 16-20.
[130]敬忠良, 肖刚, 李振华. 图像融合: 理论与应用[M]. 北京: 高等教育出版社, 2007.
[131] 潘泉, 程咏梅, 梁彦, 等. 信息融合理论及应用[M]. 北京: 清华大学出版社, 2012.
[132] Thode A M, Kuperman W A, D’Spain G L, et al. Localization Using Bartlett Matched-Field Processor Sidelobes[J]Journal of the Acoustical Society of America, 1999, 107(1): 278-286.
[133]Ma Y, Yan S, Yang K. Matched Field Noise Suppression: Principle With Application To Towed Hydrophone Line Array[J]Chinese Science Bulletin, 2003, 48(12): 1207- 1211.
[134] Yan S F, Ma Y L. Matched Field Noise Suppression: A Generalized Spatial Filtering Approach[J]Chinese Sci- ence Bulletin, 2004, 49(20): 2220-2223.
[135] Finette S, Mignerey P C. Stochastic Matched-Field Localization of an Acoustic Source Based on Principles of Riemannian Geometry[J]Journal of the Acoustical Society of America, 2018, 143(6): 3628-3638.
[136]Fink M. An Overview of Time Reversal Acoustics[J]Journal of the Acoustical Society of America, 2008, 123(5): 3183-3183.
[137]Montaldo G, Tanter M, Fink M. Revisiting Iterative Time Reversal Processing: Application to Detection of Multiple Targets[J]Journal of the Acoustical Society of America, 2004, 115(2): 776-784.
[138]Walker S C, Roux P, Kuperman W A. Synchronized Time-Reversal Focusing with Application to Remote Imaging from a Distant Virtual Source Array[J]Journal of the Acoustical Society of America, 2009, 125(6): 3828- 3834.
[139]Kim J, Douglass A, Choi P, et al. Blind Deconvolution of Simple Communication Signals Recorded in Laboratory Water Tank[J]Journal of the Acoustical Society of America, 2015, 137(4): 2212-2212.
[140] Shimura T, Watanabe Y, Ochi H, et al. Long-range Time Reversal Communication in Deep Water: Experimental Results[J]Journal of the Acoustical Society of America, 2012, 132(1): EL49-EL53.
[141]Song H C. Time Reversal Communication with a Mobile Source[J]Journal of the Acoustical Society of America, 2013, 134(4): 2623-2626.
[142]Tiemann C O, Thode A M, Straley J, et al. Three-dimen- sional Localization of Sperm Whales Using a Single Hydrophone[J]Journal of the Acoustical Society of America, 2006, 120(4): 2355-2365.
[143] 段睿. 深海环境水声传播及声源定位方法研究[D]. 西安: 西北工业大学, 2016.
[144] Gervaise C, Kinda B G, Bonnel J, et al. Passive Geoacoustic Inversion with a Single Hydrophone Using Broadband Ship Noise[J]Journal of the Acoustical Society of America, 2012, 131(3): 1999-2010.
[145]McCargar R, Zurk L. M. Depth-based Signal Separation with Vertical Line Arrays in the Deep Ocean[J]Journal of the Acoustical Society of America, 2013, 133(4): EL320-EL325.
Ocean Acoustic Target Detection Technologies: a Review
YANG Yi-xin, HAN Yi-na, ZHAO Rui-qin, LIU Xiong-hou, WANG Yong
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China)
Ocean acoustic target detection contains many different technological approaches. It is one of the important ways to the development of ocean acoustic target detection technology that underwater acoustic communication networking technology is adopted to connect active and passive detection nodes into underwater acoustic detection networks and to fuse the receivedmulti-source information. This paper analyzes the development of ocean acoustic target detection technology with respect to four aspects — passive detection, active detection, underwater communication network, and multi-source information fusion, and introduces the characteristics of relevant theories and methods. Their advantages and disadvantages are discussed. And the influence of ocean acoustic channel on target detection is revealed. Moreover, the developing trends of the ocean acoustic target detection technologies are predicted from the above-men- tioned four aspects: 1) From the perspective of spatial processing, passive detection technology will develop towards robust array processing technology for large aperture arrays, new sensors and their arrays, and full combination of signal processing and hydroacoustic physical models; 2) For active detection technology, low-frequency and high-power detection technology, multi-base network detection technology and new-system active detection technology will be continuously developed, at the same time, intelligent active detection technology and eco-friendly detection technology will be the development trend; 3) The future development of underwater communication networking technology will focus on making use of network protocols to improve communication reliability, cross-media networking protocols, task-oriented network resource scheduling, and on construction of standardized underwater acoustic network experimental platform; and 4) For multi-source information fusion detection technology, it is necessary to further conduct modeling research on the complementary relationship between measurement information and information.
acoustic target detection; passive sonar; active sonar; underwater acoustic communication; information fusion
TJ630.34; TB566; P733.23
R
2096-3920(2018)05-0369-18
10.11993/j.issn.2096-3920.2018.05.001
2018-10-09;
2018-10-17.
国家重点研发计划(2016YFC1400200).
杨益新(1975-), 男, 博士, 教授, 主要研究方向为水声信号处理
杨益新, 韩一娜, 赵瑞琴, 等. 海洋声学目标探测技术研究现状和发展趋势[J]. 水下无人系统学报, 2018, 26(5): 369-386.
(责任编辑:陈 曦)
