桥式起重机抱闸开闭控制保护系统的设计
2018-11-08胡江林
胡江林
(武汉恒际自动化控制有限公司,武汉 430082)
关键字:桥式起重机;抱闸开闭控制保护系统;设计
0 引 言
桥式起重机是我国冶金、矿山、机械、化工、林业运输中最主要、最常见的起重、运输及其多种操作的重要设备,由于这些机构主要有大梁、断梁、轨道、车轮、减速机、卷筒、滑轮、连轴器等部件组成,起重机各个部件的性能及工作状况直接影响着整个机器的形成。因此,对桥式起重机各种常见性能的故障采取相应措施,才能保障起重机的正常作业,确保生产的顺利进行。在生产作业中,桥式起重机械的溜钩是起重机械的常见故障,也是发生人身伤亡事故及设备事故的重要因素之一。本研究设计了一种起重机抱闸控制保护器系统,该系统包括起升抱闸状态检测系统、起升高度监视系统、溜钩故障报警系统、起升溜钩距离查询记录系统、抱闸开闭控制系统等五个系统。该系统设计科学合理,可以有效减少桥式起重机械的溜钩在生产作业中发生的人身伤亡事故以及设备事故,大大提高起重机的工作效率。
1 桥式起重机电气系统存在的问题
桥式起重机电气系统在生产中常见的故障如下:
(1)抱闸接触器粘连造成的溜钩事故。一是动、静铁芯之间的油污粘住;二是接触器的质量较差等。因而更换接触器时一定要仔细检查,用干布将动、静铁芯表面擦干净。
(2)提升力矩不够导致溜钩,具体表现是抱闸打开后电动机不能建立转矩而导致溜钩。首先检查变频器参数设置是否正确,检查变频器输出电压和电流是否正常,通常如果变频器参数设置正常的话,应该是变频器内部模块产生问题,更换变频器即能解决问题[1]。
(3)电磁干扰产生的误动作。由于现场工况比较复杂,各种电磁干扰比较多,有时能造成PLC的误动作。为了避免这种情况导致抱闸误动作产生溜钩,应该在电气走线时将动力线路和控制线路分开走线,编码器等采用屏蔽电缆。另外变频器本身就是谐波干扰源,对电源侧和输出侧的设备会产生影响,所以在变频器输入端要加电抗器以阻止干扰。
(4)采用闭环控制能有效避免溜钩。具有矢量控制功能的变频器具有零速全转矩功能(又称零伺服功能,即零速时电动机仍能输出150%的额定转矩),使重物停在空中,从而避免溜钩[2]。
2 行车抱闸开闭控制保护系统的设计
2.1 起升抱闸状态检测系统的设计
起升抱闸装设两个检测开关,一个装设在抱闸的下端,用于检测抱闸是否有效抱闸。一个装设在抱闸的上端,用于检测抱闸是否有效打开。如图1所示,起升抱闸状态检测系统包括制动器装置、限位装置。
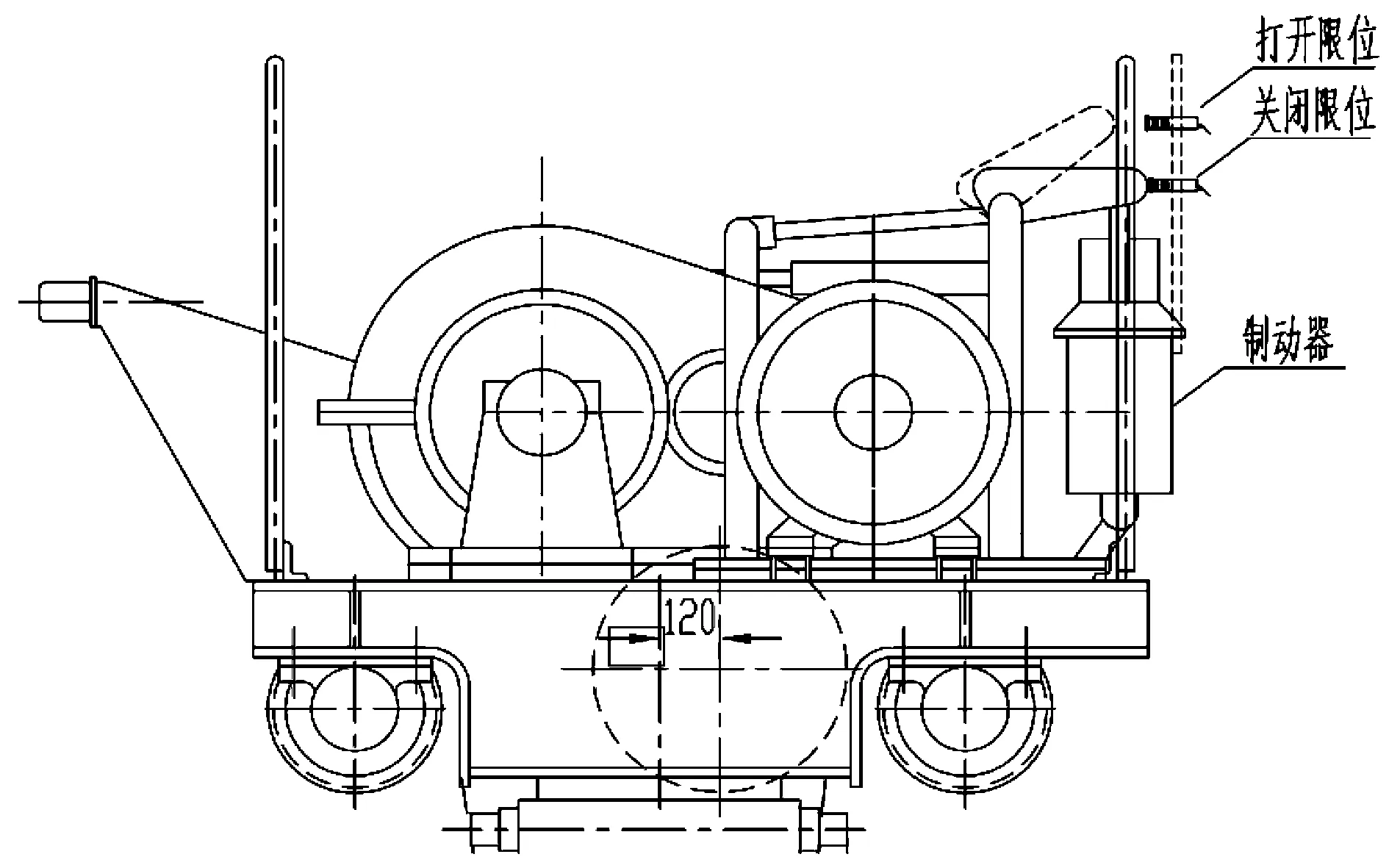
图1 起升抱闸状态检测系统的设计
2.2 起升高度监视系统的设计
通过起升机构上的钢绳卷筒后面增设两台绝对值编码器,来记录卷筒运行的位置。通过换算即可以得到主起升和副起升的高度,计算过程:首先标定起升的总高度,如起升总高度为20m,对应编码器的值为20736设为最高值。起升高度为0m时,对应编码器的值为0设为最低值。当编码器值为10368时,起升高度为10m。根据公式:OUT=((FLOAT)IN -K1)/(K2-K1)*(HI—_LIM-LO—LIM )+LO—LIM,依此线性变化。其中K1的值为0,K2的值为常数+27648。采集该值到控制器中,然后通过HMI显示并记录存档。编码器安装部位见图2所示:
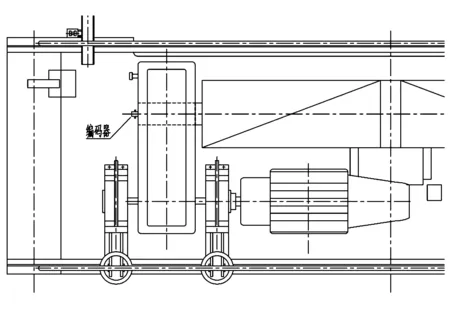
图2 起升高度监视系统的设计
2.3 溜钩故障报警系统的设计
当系统检测到发生溜钩现象时,系统给出报警信号至联动台H1,提醒操作人员及时处理。并且H2发出声光报警,提醒行车下面及周边作业人员注意安全。报警系统中的指示灯H1遵循程序中设定的频率进行频闪,提醒维护人员出现故障部位[3]。输出部分见图3所示:
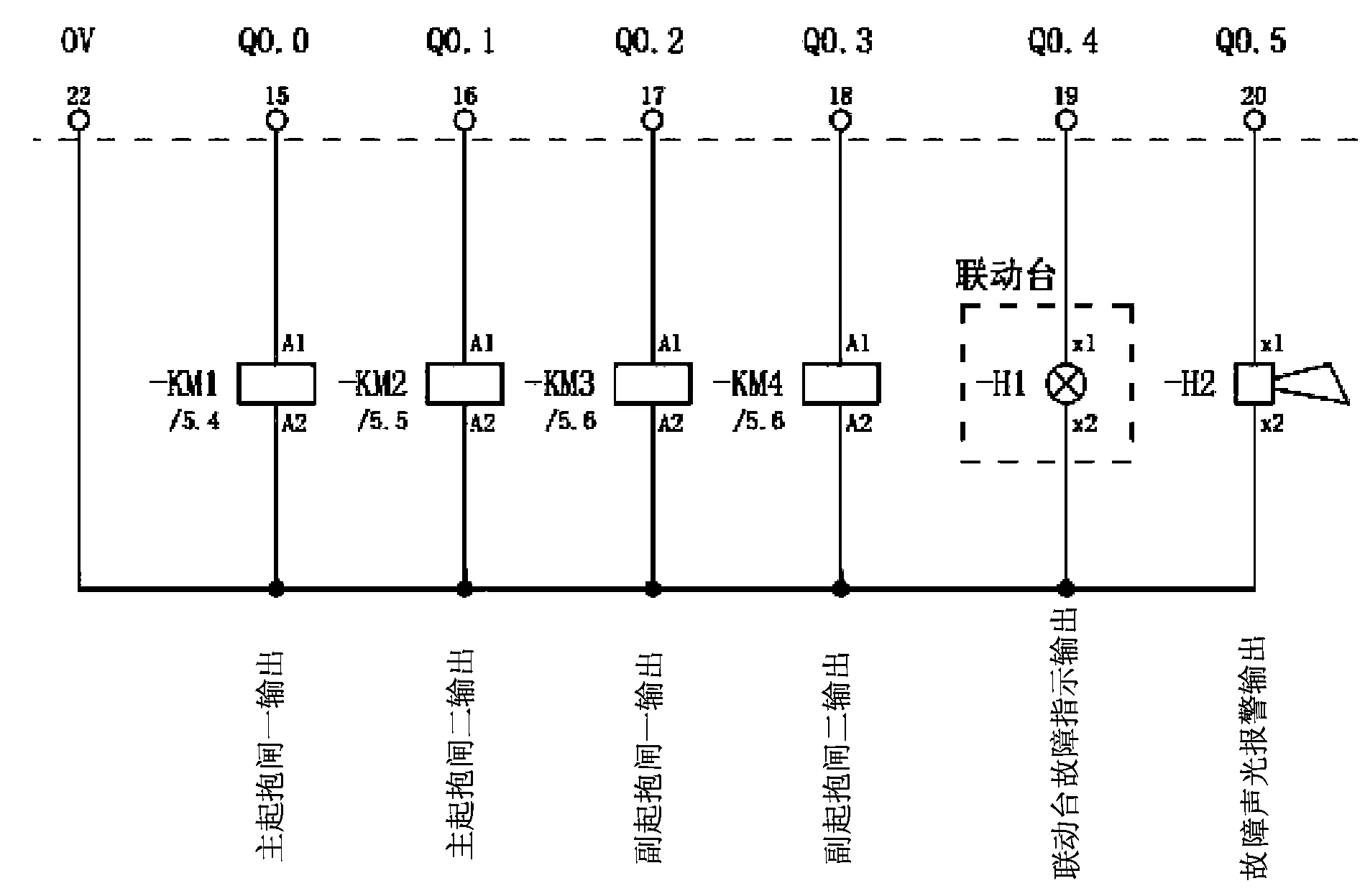
图3 溜钩故障报警系统的设计
(1)故障指示灯频闪1s/次,为副钩闸接触器粘连故障。
(2)故障指示灯频闪0.5 s/次,为主钩闸接触器粘连故障。
(3)故障指示灯先频闪0.5 s/次,再1s频闪二次,停顿3s。然后循环频闪0.5s二次,再1s频闪二次,停顿3s,为主钩抱闸出现故障。
(4)故障指示灯先频闪1s二次,再2s频闪二次,停顿3s。然后循环频闪1s二次,再2s频闪二次,停顿3s,为副钩抱闸出现故障。
2.4 起升溜钩距离记录查询系统的设计
起升抱闸随着长时间的使用,闸皮会慢慢的磨损。在闸皮严重磨损后,吊载比较轻的负载时,现象不明显。但是一旦重载起吊时,极易发生溜钩情况,轻则造成财产损失,重则危及下方作业人员生命。借助装设在减速机上的绝对值编码器、结合变频器的运行状态、抱闸上面的检测限位和相应的专用控制软件可以很方便的记录和检测出抱闸下滑的距离。该功能可以早期发现抱闸的磨损量,进而减少甚至杜绝因为抱闸磨损太大导致溜钩事故的发生(见图4)。

图4 起升溜钩距离记录查询系统的设计
2.5 抱闸开闭控制系统的设计
本系统采用变频器控制信号中的运行控制信号采集进控制抱闸开闭系统,相应的再采集变频器的电流信号和变频器的速度信号。电流信号作为开闸信号,速度信号作为关闸信号。变频器电流采用电机电流的30%作为设定值,速度关闸信号采用电机实际速度10%作为设定值。
通过两个信号作一个与门,即两个信号均正常时,才允许打开抱闸,才能确保控制抱闸信号是正确值。抱闸控制信号分为两路输出,分别驱动两路接触器。如附图3中的主起升抱闸输出(KM1和KM2),副起升抱闸输出(KM3和KM4)。采用双抱闸输出,可以有效杜绝采用单一控制信号,如果出现击穿或粘连精况时,可能会导致溜钩事故发生[4]。
如果当其中一路输出信号出现击穿,则控制系统会自动判断出是哪一路信号发生击穿现象。判断原理为:当控制系统未检测到抱闸控制信号输出时,而抱闸接触器(KM1~KM4)任一接触器接点均有信号反馈,则控制系统认为该输出点击穿或相对应的接触器粘连(见图5)。
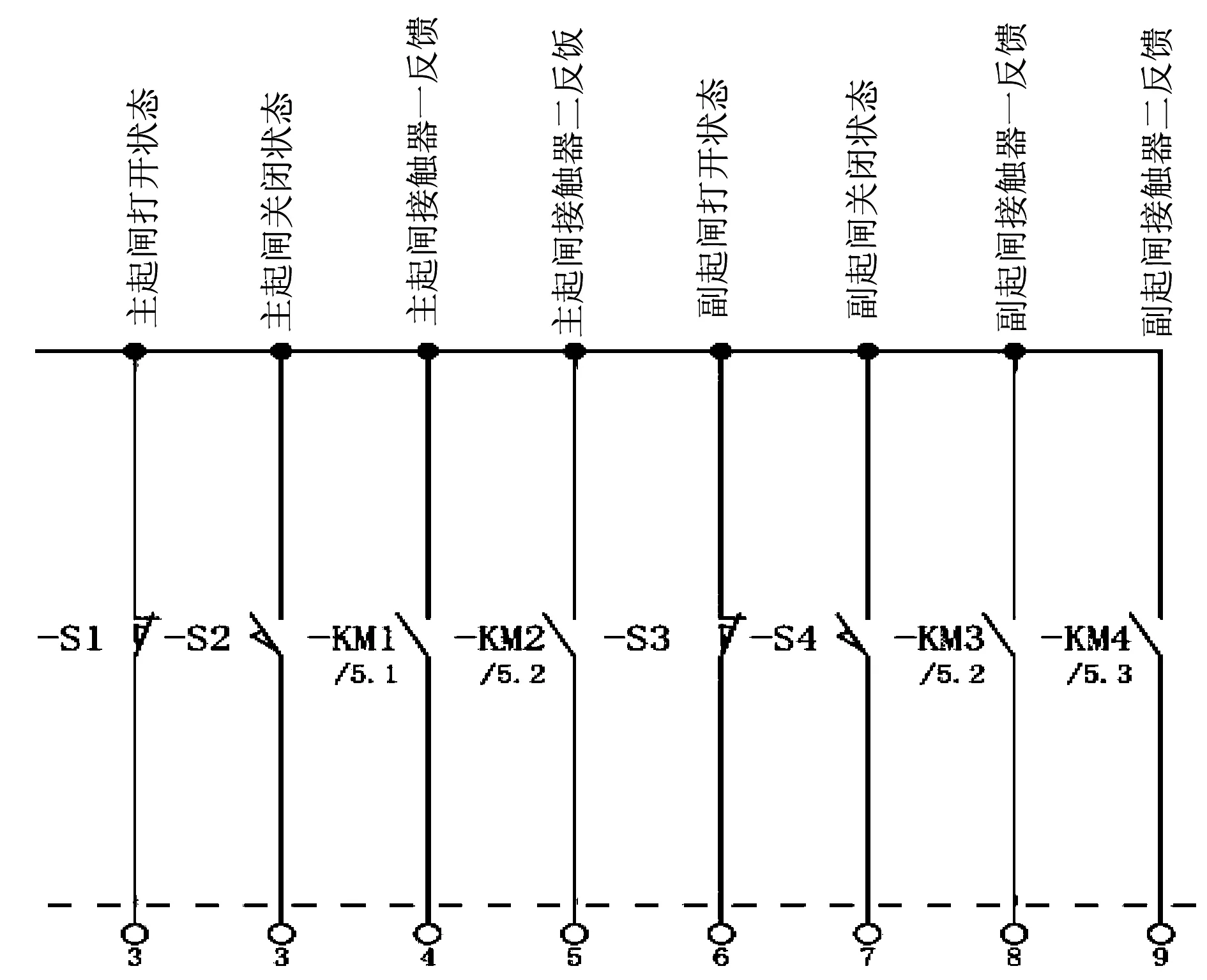
图5 抱闸开闭控制系统的设计
3 结 语
本文基于桥式起重机的基本工作原理,设计了行车抱闸开闭控制保护系统,整个系统包括五个部分:起升抱闸状态检测系统、起升高度监视系统、溜钩故障报警系统、起升溜钩距离查询记录系统以及抱闸开闭控制系统等五个系统。该系统设计科学合理,可以有效减少桥式起重机械的溜钩在生产作业中发生的人身伤亡事故以及设备事故,大大提高起重机的工作效率。通过多年的实践证明,工作人员在操作桥式起重机的过程中,还要不断加强桥式起重机设备的点检、维护、润滑管理、加强操作人员的责任意识和安全意识,不断加强学习和管理,加强对常见事故的预防能力,才能最大限度的避免安全事故的发生[5]。
