利用无人机LiDAR完善车载移动测量系统数据的研究与应用
2018-11-02张文涛张伟红王留召
张文涛,张伟红,王留召
(1. 河南理工大学测绘与国土信息工程学院,河南 焦作 454003;2. 昆明冶金高等专科学校测绘学院,云南 昆明 650033)
随着计算机技术、GNSS定位技术和惯性导航技术的不断更新发展,作为快速采集道路及道路两旁地物的三维空间数据信息的车载移动测量系统也日趋成熟,已经广泛应用于各种测绘工作中,取得了良好的效果。其能够按需测量,快速高效地获取道路及其两侧数据,车载点云密度大、空间分辨率高、数据信息量丰富、属性清晰,所采集的地物如建筑物轮廓、路灯、地面等的点云信息在空间分布上具有真实的三维特性,能够比较完整地表达采集地物的真实三维姿态。
但是,车载移动测量系统主要沿着扫描路线获取道路及其两侧的地物数据,容易受到遮挡,点云产生数据空洞,数据不够完整,并且在采集数据过程中,容易受到道路两侧高大地物的影响造成GNSS信号失锁,点云精度下降。文献[1—5]利用车载移动测量系统实现了空间地物的快速采集,得到了精度较高、比较直观的数据,但没有提出解决GNSS信号失锁和数据空洞的方法。文献[6—7]分别用外业调绘和补测来解决数据空洞和GNSS信号失锁的问题,但是外业作业量仍费时费力。文献[8]采用小型三轮车配上里程计在巷道中采集数据,虽然能进一步获取较为完整的数据,但GNSS信号和数据空洞问题仍然没有解决。文献[9—11]分别借助人工丈量数据、二维地籍图房屋轮廓线和基线交会法解决点云数据空洞的问题,但工作量较大,人机交互时间长。文献[12]结合机载和车载点云来解决车载移动测量系统在边坡以外的测量盲区问题,但是成本代价太高,作业程序复杂。文献[13—16]分别介绍了无人机LiDAR系统在农业灾害评估、山洪灾害调查和电力线巡检中的应用,取得了良好的效果,说明无人机LiDAR系统的发展日渐成熟。因此,本文提出利用无人机LiDAR系统,在低空低速飞行下获取高精度无人机LiDAR点云数据,来修正GNSS信号失锁的车载点云和完善车载点云数据,使其更加完整。
1 无人机LiDAR系统的集成
无人机LiDAR系统的集成应满足两点:一是无人机LiDAR点云精度足够高,可以满足应用;二是“轻小”,即质量轻、形状小,可以满足小型无人机的载重条件。
1.1 传感器选择
激光雷达选择使用美国Velodyne LiDAR VLP-16型号的激光雷达和北京航天控制仪器研究所的惯性测量单元IMU。VLP-16形状小,质量轻,仅为830 g,外观设计精巧,非常适合安装于小型无人机上;它测距可达100 m,每秒能够输出300 000个测量点,功率低,能实时传输数据。北京航天控制仪器研究所的惯性测量单元IMU,精度高,可以实现静态初始对准和结束对准,避免了整个系统为实现初始对准和结束对准所做的大机动式飞行,在一定程度上增强了整个系统的续航能力。
1.2 控制系统
控制系统使用惯性测量单元内置的控制板,写入自编程序,能够接收记录传输GNSS数据和IMU数据,通过电脑进入控制板内置程序,确定正确参数设置来实现GNSS数据和IMU数据的接收、记录和传输。控制板将接收到的GNSS时间信息通过串口方式分别传输给激光扫描仪和惯性测量单元IMU,解决GNSS数据、IMU数据和激光数据的时间同步问题。
将微型电脑芯片和固态硬盘组成微型计算机来实现VLP-16激光数据的实时显示、传输和记录,同时,将GNSS数据通过网口记录到微型计算机。IMU数据则通过串口引出,记录在外接控制盒中,随时插拔实现记录数据和停止,简单方便。
1.3 系统集成
使用一个铝片外壳,将激光扫描仪、惯性测量单元、微型计算机和GNSS天线有机地集成了一个刚性整体,形体小,重量轻,重量为4.87 kg。无人机是轻小型大疆无人机,配置A2飞行控制器,载重为5 kg。图1为集成的无人机LiDAR系统。

图1 无人机LiDAR系统
2 试验验证
本文使用SSW车载移动测量系统和集成无人机LiDAR系统同时在一个小区域采集数据。该村房屋较高,多为两层砖房,道路狭窄,最宽道路仅容两辆轿车勉强通过,最窄道路仅容一辆汽车通过。
2.1 试验数据获取
根据村子情况,在开阔的地方架设基站,将无人机航高设置为40 m,车载移动测量系统实施路线往返扫描的作业方法。数据获取后,在试验区使用GPS RTK和水准仪分别获取平面控制点和高程控制点。
2.2 无人机LiDAR点云效果及精度验证
无人机LiDAR数据采集后,经内业处理后生成点云。如图2所示。

图2 无人机LiDAR点云
由图2可以看出,无人机LiDAR点云房屋顶面信息完整兼顾少量里面,纹理结构清晰,树木、电线杆等部件信息清晰完整。由于无人机续航能力和试验区域范围较小,选取了28个平面控制点和14个高程控制点。表1、表2分别为无人机LiDAR点云的平面和高程精度统计,平面中误差为8.5 cm,高程中误差为9.2 cm。
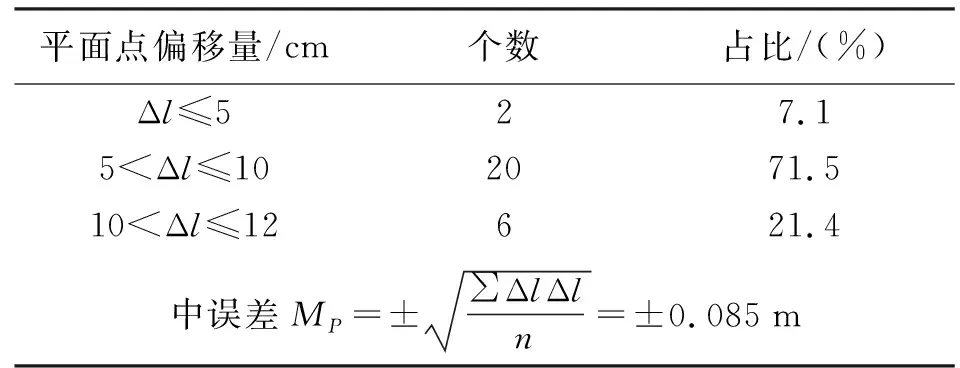
表1 点云平面精度统计

表2 点云高程精度
2.3 利用无人机LiDAR点云完善车载点云
2.3.1 无人机LiDAR点云修正车载点云
如图3所示,由于房屋影响,车载点云往返点云不重合,存在一定的误差。无人机LiDAR点云是无人机在空中采集的数据,遮挡少、信号强、点云精度高,可以将无人机LiDAR点云的采集标志点作为车载点云的纠正控制点,从而纠正车载点云,使车载点云满足一定的精度要求。如图4所示,图片为车载点云将无人机LiDAR点云的采集点作为控制点的纠正结果,经纠正后,车载点云往返重合精度很好。为了验证纠正精度,选取了28个平面控制点和14个高程控制点,表3、表4分别是纠正后车载点云平面和高程精度统计,平面中误差为9.7 cm,高程中误差为8.2 cm。
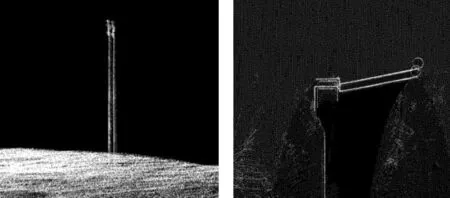
图3 车载点云误差
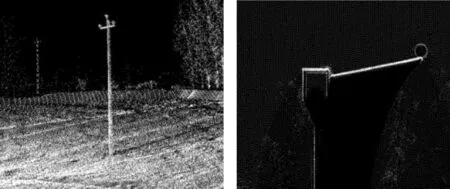
图4 车载点云误差纠正结果

平面点偏移量/cm个数占比/(%)5<Δl≤101760.710<Δl≤141139.3中误差MP=±∑ΔlΔln=±0.097m
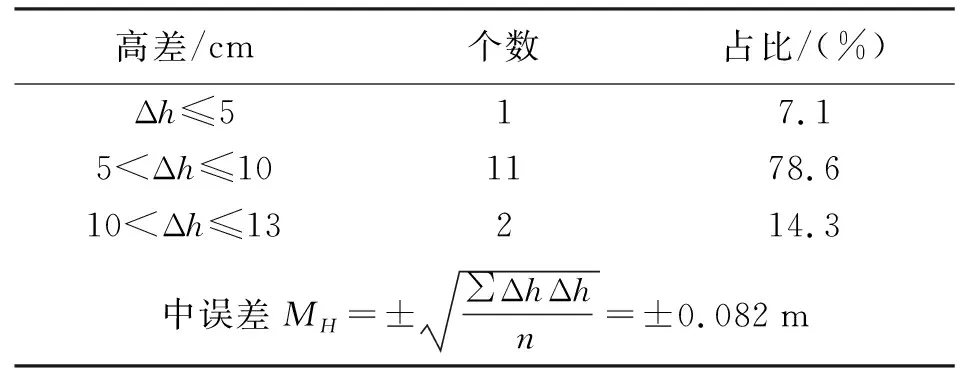
表4 车载点云高程精度统计
2.3.2 无人机LiDAR点云完善车载点云
如图5所示,车载点云中的建筑物墙体立面信息丰富;受到墙体遮挡,院内地物无法采集,出现数据空洞。而无人机LiDAR点云涵盖院内的地物信息,且建筑物顶面信息丰富,整体轮廓线清楚。无人机LiDAR点云可以很好地弥补车载点云的不足,完善建筑物的点云整体信息,填补数据空洞,为三维建模、不动产测量和地形地籍测量等提供准确的数据信息。如图6所示, 无人机LiDAR点云和车载点云达到了优势互补的目的。
3 结 语
通过试验,本文集成了一套无人机LiDAR系统,总结出一套利用无人机LiDAR点云完善车载点云的方法,验证了该方法的可行性,保证了车载点云的精度和完整性。但是,由于无人机LiDAR系统续航能力不足,不能进行大范围试验,只能在小区域内实施;另外,无人机LiDAR系统载荷较大,不利于持续作业。如果能够解决无人机的续航能力,选择精度更高、重量更轻的激光雷达和惯性导航系统,则可以在大区域大范围内推广应用。

图5 点云对比

图6 点云优势互补
