增广拉格朗日双边全变分压缩成像重构算法
2018-10-26高宇轩孙华燕张廷华
高宇轩,孙华燕,张廷华
(1.航天工程大学研究生院,北京 101416;2.航天工程大学电子与光学工程系,北京 101416)
1 引 言
压缩感知(Compressive Sensing,CS)[1-2]理论的出现使得基于稀疏表示的图像非线性重建得到广泛关注,该理论表明如果信号在某个变换域上是稀疏的或可稀疏表示,就可通过一个与该稀疏变换矩阵Ψ不相关的测量矩阵Φ将高维信号投影到低维空间。这些投影包含了重构图像所需要的大部分信息,因此可以通过求解稀疏最优化问题从低维观测向量精确地重构出原始目标图像。
目标图像的稀疏重构是从低维观测信号中恢复出高维信号的过程,是一个典型的病态或不对称反问题。目前,重构算法主要包括贪婪算法和凸优化算法两大类。贪婪算法是解决基于l0范数最小化模型提出的经典重构算法,典型算法有MP[3]算法和OMP[4]算法、分段正交匹配追踪(StOMP)[5]算法和压缩采样匹配追踪(CoSaMP)[6]算法等。凸优化算法是将信号恢复问题从求解l0范数问题转化成为求解最小l1范数的凸优化问题,比较具有代表性的凸优化算法有基追踪(BasisPursuit,BP)[7]算法、内点法、稀疏梯度投影算法[8]和全变分(Total Variation,TV)算法[9]等,其中TV算法在图像重构中的应用较为广泛。但是,目前的TV算法[10-11]仍然存在图像高频边缘信息保持较差或目标函数求解效率较低等问题。
本文在TV算法的基础上,提出了增广拉格朗日双边全变分重构算法(BTV minimization scheme based on augmented Lagrangian and alternating direction algorithms,BTVAL3),首先引入双边滤波保持图像边缘特性,然后将目标函数转化为增广拉格朗日函数,利用交替方向法求解函数模型的最优解,并在迭代过程中选用最速下降法优化了目标函数求解效率。
2 TV算法
TV算法是Candes等人从稀疏性在绝大多数自然图像的离散梯度向量中都能得到满足的角度出发,通过对梯度的稀疏性进行描述并求解,提出的一种适合二维图像压缩重构的算法。它通过计算图像梯度之和作为一个平滑处理的参考量。TV正则项可以表示为:
(1)
其中,x是原始图像;Dix代表对图像每个像素横向和纵向进行离散梯度计算。Φ是测量矩阵;y是x通过Φ得到的测量值。‖·‖算子可以是l1范数或者是l2范数,分别对应各项异性的TV和各项同性的TV。l2范式会减少恢复出来的图像的锯齿边界,默认选择l2范式,这是一个典型的有约束的最优化问题。
基于TV算法对图像进行重构时,一般情况下利用TVl1l2作为衡量图像离散梯度值的标准[12],定义为:

(2)
其中,Dh和Dv依次代表梯度操作子在水平与垂直方向的取值;x代表输入图像。如果用(i,j)代表x(维数为M×N)中某一像素点的位置信息(1≤i≤M,1≤j≤N),则水平和垂直方向的梯度可依次描述为:
(3)
(4)
上述算法中,对离散梯度的标准定义格式如图1所示,图1(a)描述了图像中任一像素点的梯度标准格式,图1(b)和图1(c)分别代表所有像素的梯度分别在水平和垂直方向上的定义。
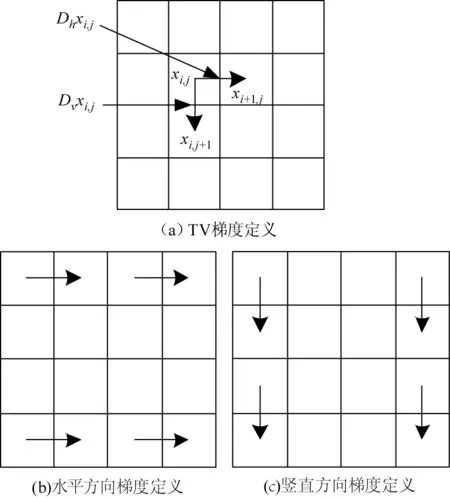
图1 梯度定义Fig.1 The definition of gradient
TV算法在重构过程中对图像全域搜索,需要对每个像素进行横向与纵向的梯度求解,这在一定程度上会造成图像边缘信息与平滑区域内的噪声混淆,因而出现边缘信息退化、对比度降低等现象。
3 BTVAL3算法
3.1 双边全变分正则化
双边滤波同时考虑像素点的空域信息和值域信息,对图像边缘等高频信息保存结果较好,能够解决TV算法中存在的边缘信息退化、对比度降低等问题。将双边滤波应用于全变分,既有对图像像素之间的空间关系的约束,也有对像素间的灰度关系的约束[11],与TV正则化算法相比,能够在抑制噪声的同时进一步去除图像中的虚假边界,更好地保持图像的边缘特性[10]。双边全变分正则化函数项可以表示为:
(5)

双边全变分正则化算子本质上就是将点(i,j)的像素值与其p×p范围邻域内的其他像素点的像素值之差以一定比例反馈到该点。双边滤波具有较好的边缘保持功能[14]。双边全变分差分定义如图2所示。

图2 BTV差分定义Fig.2 The gradient definition of BTV
双边全变分正则化方法是对其他常用正则化方法的推广[12],如果限制m和l在m=1,l=0或者m=0,l=1并且α=1这两种情况时,可以定义算子Qh和Qv作为一阶导数(Qh=x-Sh,Qv=x-Sv),那么上式就可以表示为:
ΥBTV(x)=‖Qhx‖1+‖Qvx‖1
(6)
从上式中可以看出,与TV算法的表达式相一致,也就是说TV算法是双边全变分算法的一种特殊形式。
双边全变分预先设定窗口尺寸,每个像素的梯度求解过程仅在已设定的窗口范围内在水平和竖直方向同时梯度求解,这在很大程度较好地保持了图像的边缘特征以及细节信息。其中,参数的选择受主观影响较大[15],对算法的重构性能以及算法的运行速度有一定的影响。
根据以上分析可知,BTVAL3算法压缩成像重构模型则可以表示为:
(7)
3.2 基于增广拉格朗日函数的目标函数求解
目标函数式(7)不可微并且非线性,无法进行直接求解。Rockafellar[17]提出的全局收敛性定理指出在每一步迭代过程中,即使不对子问题进行精确求解也能达到全局收敛。因此,本文将目标函数等价转化成一系列无约束子问题,将拉格朗日算子应用于目标函数的求解过程,目标函数的求解问题即可转化为最小化增广拉格朗日函数的问题。由式(1)和式(5)可得,BTVAL3算法中的目标函数可以表示为:
(8)

(9)
在求解增广拉格朗日函数的过程中需要高效地解决每一步迭代过程中的子问题,本文采用交替方向最小化方法克服子问题的非可微性及非线性。假设xk和gi,k是第k次迭代子问题的最优解,进而可以求得gi,k+1。由于求解过程非常复杂,因此选用梯度下降法来迭代求解式,在每次迭代过程中,梯度下降法都要更新梯度方向,数据较大的情况下,运算代价非常大。因此,选用近似解xk作为起点,只进行一次梯度下降算法,求得xk+1。最后判断是否满足初始阈值,停止迭代,输出结果。利用增广拉格朗日函数算子求解目标函数流程图如图3所示。

图3 求解目标函数流程图Fig.3 The flow chart of solving objective function
4 仿真实验分析
为了验证BTVAL3算法相对于改进前的全变分算法的重构性能,进行仿真实验分析。实验以MATLAB_2014a为平台,选用Building标准图像作为测试图像,以高斯随机测量矩阵为编码方式。实验结果以峰值信噪比PSNR值、重构错误率ERROR和结构相似度SSIM为评价标准。其中,PSNR值越大越好、ERROR值越小越好、SSIM值介于[0,1]之间,越接近1越好。由于测量率和噪声水平对重构算法性能都有较大的影响,因此实验比较分析了算法在不同测量率、不同噪声水平下的重构性能。为了避免实验结果的偶然性,取10次仿真结果的平均值作为最终实验结果。
4.1 各算法在不同测量率下的重构结果
为了分析本文提出的BTVAL3算法的重构性能,本文将典型的OMP算法、SP算法、CoSaMP算法、IRLS算法、TVAL3算法进行比较。以PSNR、ERROR、SSIM为评价标准,各种算法在不同测量率下对 Building 图像的重构结果分别如图4~6所示。

图4 各算法重构图像PSNR值Fig.4 The PSNR values of the reconstructed images of each algorithm

图5 各算法重构图像ERROR值Fig.5 The ERROR values of the reconstructed images of each algorithm
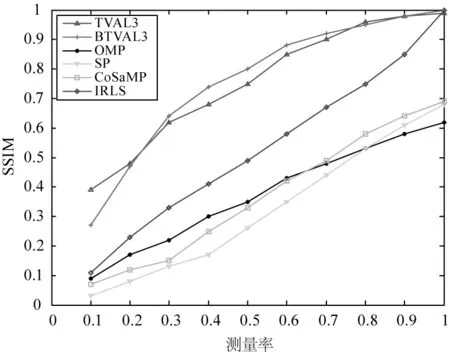
图6 各算法重构图像SSIM值Fig.6 The SSIM values of the reconstructed images of each algorithm
从图4~6中各算法在不同测量率下的重构图像PSNR值曲线、重构错误率ERROR曲线以及结构相似度SSIM曲线可以分析得出:TVAL3算法和BTVAL3算法的重构性能在各测量率下优于其他典型重构算法。其中IRLS算法比较特殊,在未压缩情况下重构结果优于其他算法。改进的BTVAL3算法重构性能相对于TVAL3算法而言,各测量率下重构图像的PSNR值提高约2 dB;重构错误率在测量率小于0.7时下降低10%左右,而测量率在大于0.7时错误率降低2%左右;结构相似度在测量率小于0.2时低于TVAL3算法,测量率介于0.2和0.7之间时,BTVAL3算法的结构相似度较TV算法相比提高0.1左右,测量率大于0.7时则相似度相差不大。
为了更直观地表示重构效果,在测量率为0.2和0.5时TVAL3算法与BTVAL3算法的重构结果如图7和图8所示。

图7 测量率为0.2时重构结果Fig.7 The reconstruction results when the measurement rate is 0.2
从图7和图8中可以看出,相同测量率下BTVAL3算法的重构图像轮廓信息更加清晰。

图8 测量率为0.5时的重构结果Fig.8 The reconstruction results when the measurement rate is 0.5
4.2 不同噪声水平下的重构结果
由于噪声水平会对算法的重构性能产生一定的影响,本节对BTVAL3算法对噪声的鲁棒性进行了分析。根据4.1节可知,TVAL3算法与BTVAL3算法的性能优越,远高于其他典型算法。因此,本节只对这两种算法在不同噪声水平下的重构结果进行了分析比较。其中,在各测量率下的重构结果相似,选择测量率为0.5时Building图像在高斯随机测量矩阵下不同噪声水平的重构结果如图9~11所示。
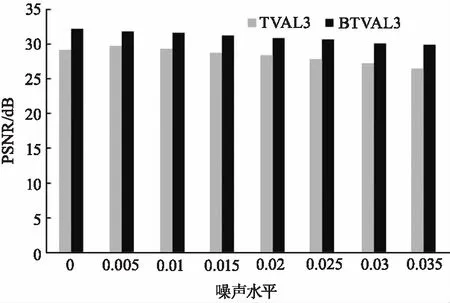
图9 不同噪声水平下重构图像PSNR值Fig.9 The PSNR values of reconstructed image at different noise levels

图10 不同噪声水平下重构图像ERROR值Fig.10 The ERROR values of reconstructed image at different noise levels

图11 不同噪声水平下重构图像SSIM值Fig.11 The SSIM values of reconstructed image at different noise levels
从图9~11中TVAL3算法与BTVAL3算法在不同噪声水平下的重构图像PSNR值曲线、重构错误率ERROR曲线以及结构相似度SSIM曲线可以分析得出:BTVAL3算法相对于TVAL3算法而言在相同测量率下随着噪声水平的提高,重构图像的PSNR值降低的很小,基本保持不变;重构错误率增加的很缓慢,而且重构错误率很低,低于TVAL3算法10%左右;结构相似度随着噪声水平的提高,略高于TVAL3算法,但是相差不明显。可以看出,BTVAL3算法不同噪声具有更好的鲁棒性。
5 结 论
本文在TV算法的基础上引入双边滤波思想,通过同时对图像像素之间的空间关系和灰度关系进行约束,弥补了全变分正则项求解过程中对全域进行差分导致的图像边缘信息模糊的不足。求解过程中通过在目标函数中加入拉格朗日算子,将目标函数转化为加入增广拉格朗日函数,利用交替方向法求解该函数最小值,迭代过程中选择梯度下降法进行求解,可使算法得到优化,运算速率得到提升。最后利用MATLAB程序进行仿真实验,证明改进的BTVAL3算法相对于TVAL3算法能够更好地保持图像的边缘信息,在不同测量率下重构图像的结构相似度提高了0.1、PSNR提高了2 dB,重构图像错误率降低了10%左右,并且BTVAL3算法对噪声也具有较好的鲁棒性,图像重构质量得到进一步提高。
